matlab模糊控制工具箱使用和模糊控制pid实例参考
matlab模糊控制工具箱使用和模糊控制pid实例参考

之前写的内容,最近咨询这方面的粉丝较多,故在分析一下
、模糊控制工具箱使用
首先我们在Matlab的命令窗口中输入fuzzy,回车就会出来这样一个窗口。
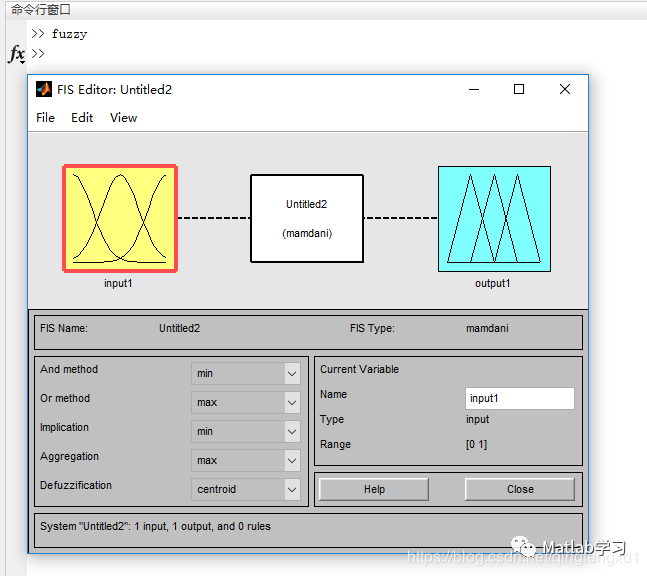
下面我们都是在这样一个窗口中进行模糊控制器的设计。
1)确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里我们可以选取标准的二维控制结构,即输入为误差e和误差变化ec,输出为控制量u。注意这里的变量还都是精确量。相应的模糊量为E,EC和U,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。
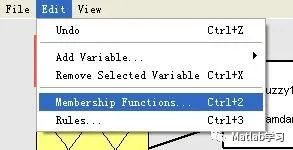
2)输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。
在模糊控制工具箱中,我们在Member Function Edit中即可完成这些步骤。首先我们打开Member Function Edit窗口.
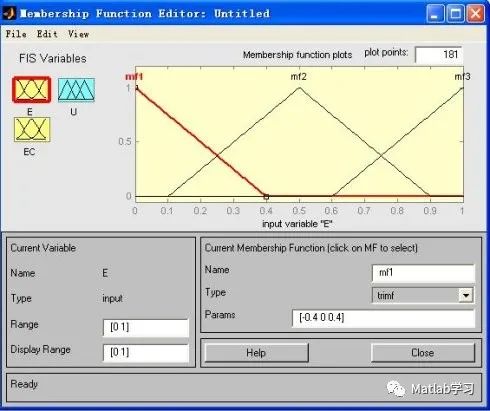
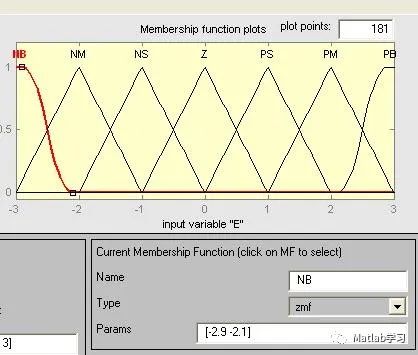
然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-3 3],添加隶属函数的个数为7.
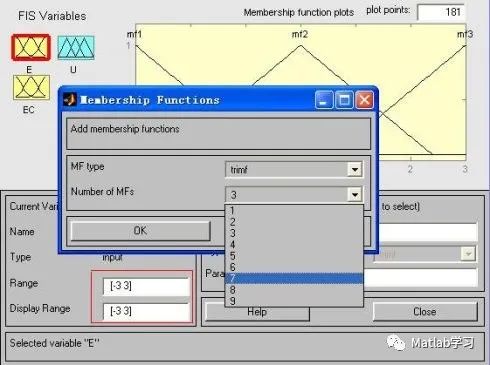
然后根据设计要求分别对这些隶属函数进行修改,包括对应的语言变量,隶属函数类型。
3)模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。
制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。
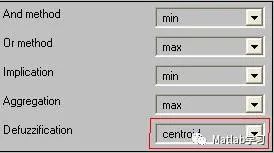
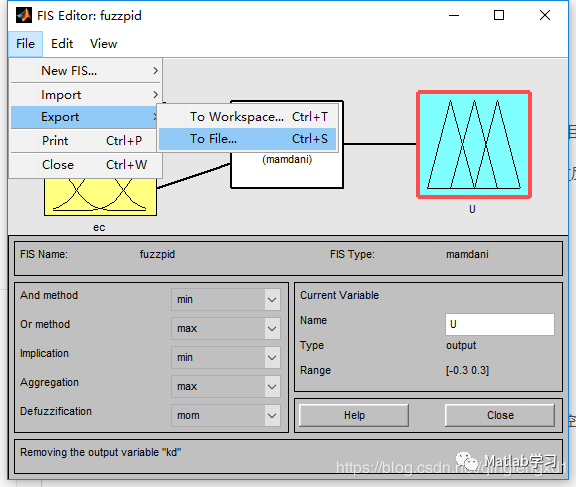
4)对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,模糊化方法很多,我们这里选取重心法。
5)然后Export to disk,即可得到一个.fis文件,这就是你所设计的模糊控制器。
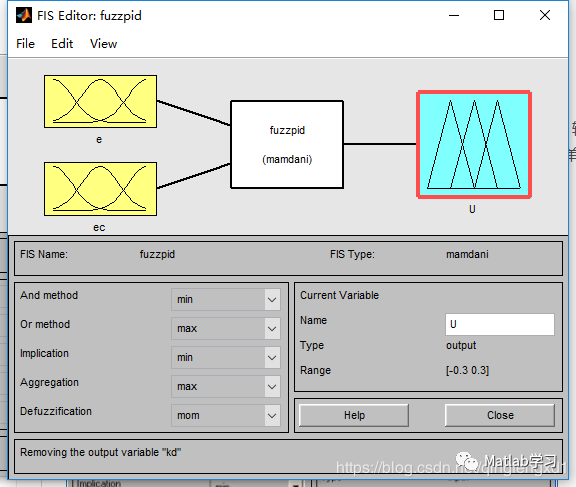
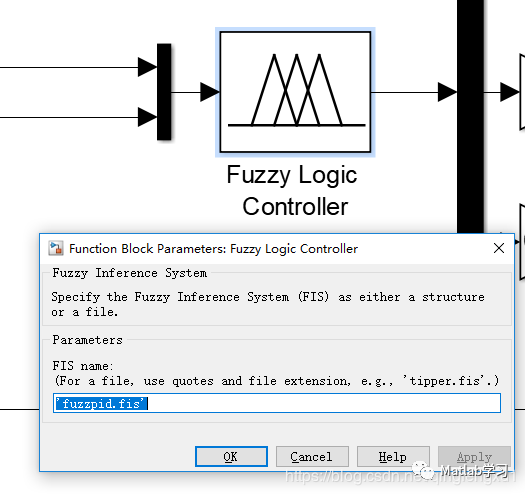
6)simulink中使用fis文件,首先加入fuzzy模块,然后写入模糊文件,注意应用格式加单引号: 'fuzzpid.fis'
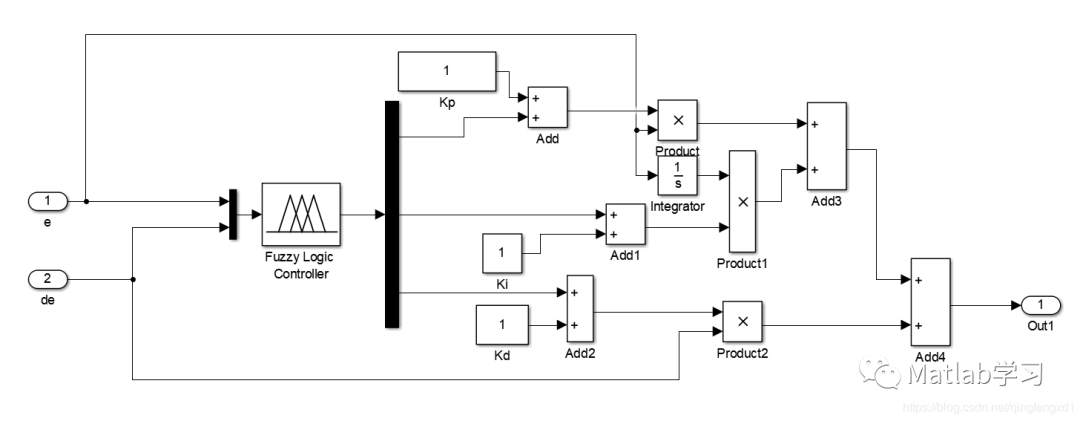
2、模糊控制pid实例
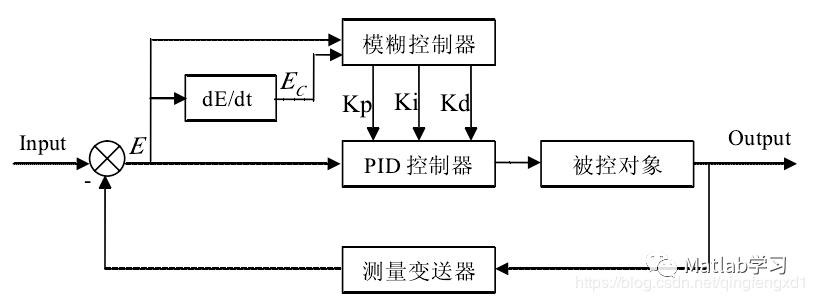
模糊PID控制,即利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点。模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分。小车通过传感器采集赛道信息,确定当前距赛道中线的偏差E以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数。
KP的模糊规则控制表
∆kp | EC | |||||||
|---|---|---|---|---|---|---|---|---|
NB | NM | MS | ZO | PS | PM | PB | ||
E | NB | PB | PB | PM | PM | PS | ZO | ZO |
NM | PB | PB | PM | PS | PS | ZO | NS | |
NS | PM | PM | PM | PS | ZO | NS | NS | |
ZO | PM | PM | PS | ZO | NS | NM | NM | |
PS | PS | PS | ZO | NS | NS | NM | NM | |
PM | PS | ZO | NS | NM | NM | NM | NB | |
PS | ZO | ZO | NM | NM | NM | NB | NB | |
KI的模糊规则控制表
∆ki | EC | |||||||
|---|---|---|---|---|---|---|---|---|
NB | NM | NS | ZO | PS | PM | PB | ||
E | NB | NB | NB | NM | NM | NS | ZO | ZO |
NM | NB | NB | NM | NS | NS | ZO | ZO | |
NS | NB | NM | NS | NS | ZO | PS | PS | |
ZO | NM | NM | NS | ZO | PS | PM | PM | |
PS | NM | NS | ZO | PS | PS | PM | PB | |
PM | ZO | ZO | PS | PS | PM | PB | PB | |
PB | ZO | ZO | PS | PM | PM | PB | PB | |
KD的模糊规则控制表
∆kd | EC | |||||||
|---|---|---|---|---|---|---|---|---|
NB | NM | NS | ZO | PS | PM | PB | ||
E | NB | PS | NS | NB | NB | NB | NM | PS |
NM | PS | NS | NB | NM | NM | NS | ZO | |
NS | ZO | NS | NM | NM | NS | NS | ZO | |
ZO | ZO | NS | NS | NS | NS | NS | ZO | |
PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO | |
PM | PB | NS | PS | PS | PS | PS | PB | |
PB | PB | PM | PM | PM | PS | PS | PB | |
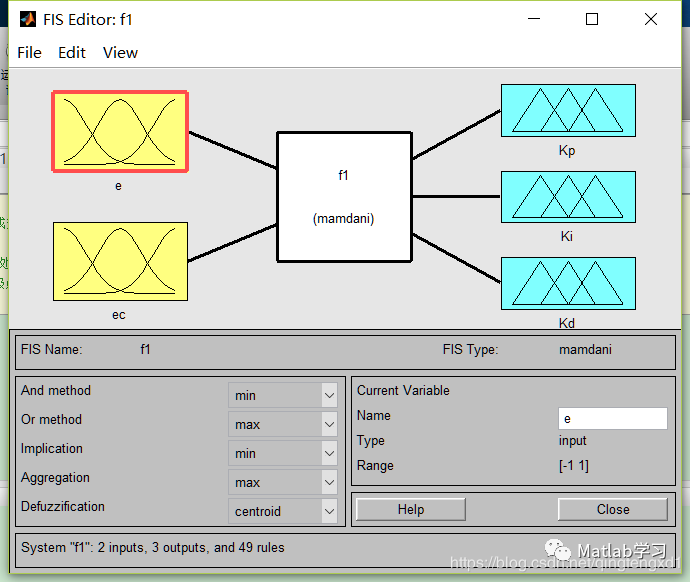
模糊推理系统结构图
输入变量的隶属取三角形函数,如下:
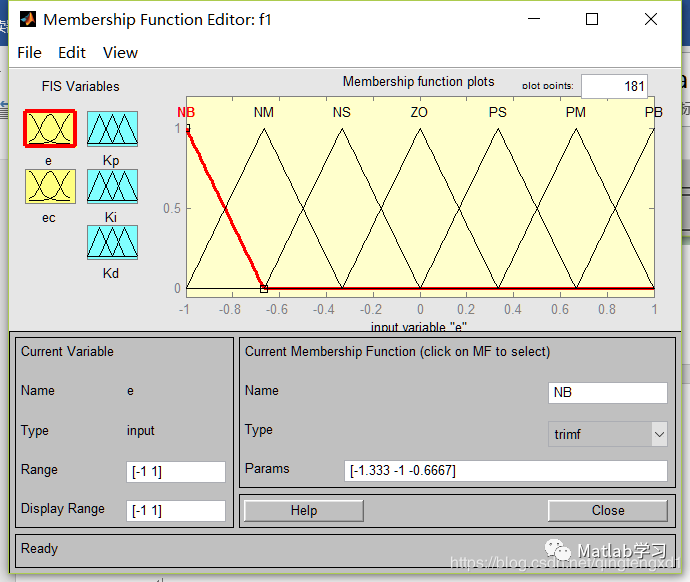
误差变量E的隶属函数
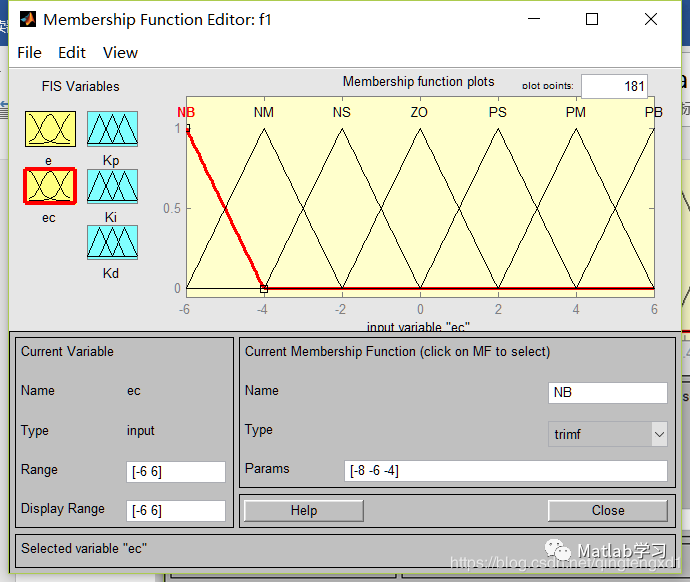
误差变化变量EC的隶属函数
输出变量的隶属同样取三角形函数,如下:
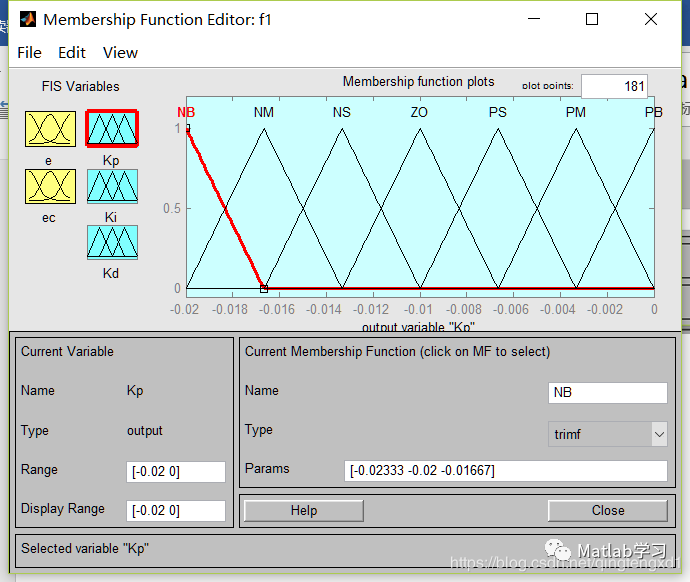
输出变量KP的隶属函数
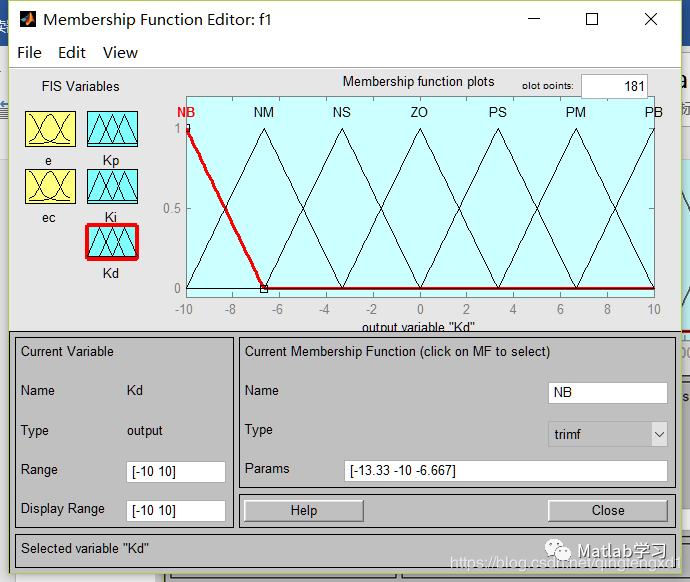
输出变量KD的隶属函数
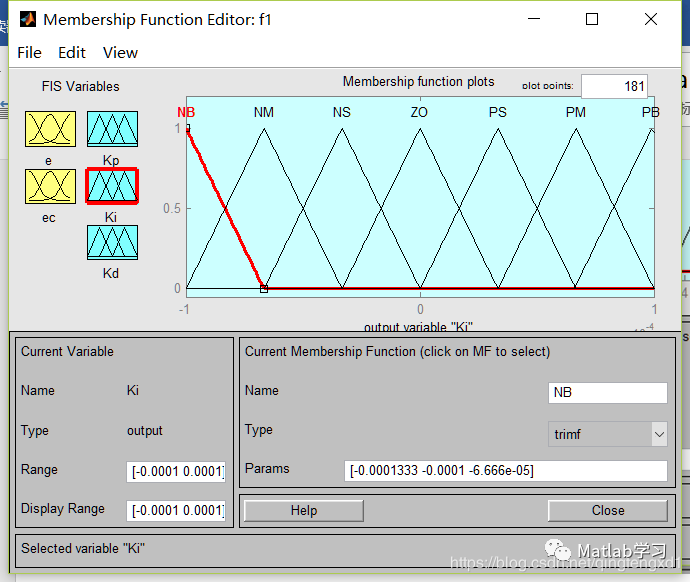
输出变量KI的隶属函数
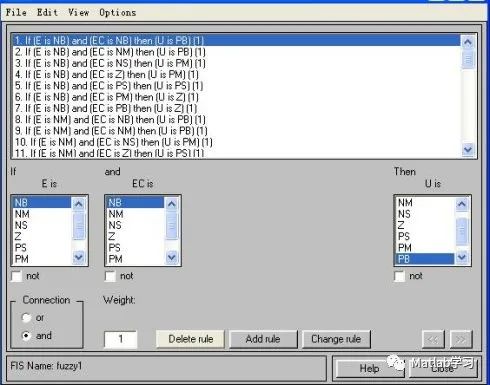
确定了输入和输出隶属函数后,在模糊规则编辑器中,输入表格中的模糊推理规则,共49条,如下图
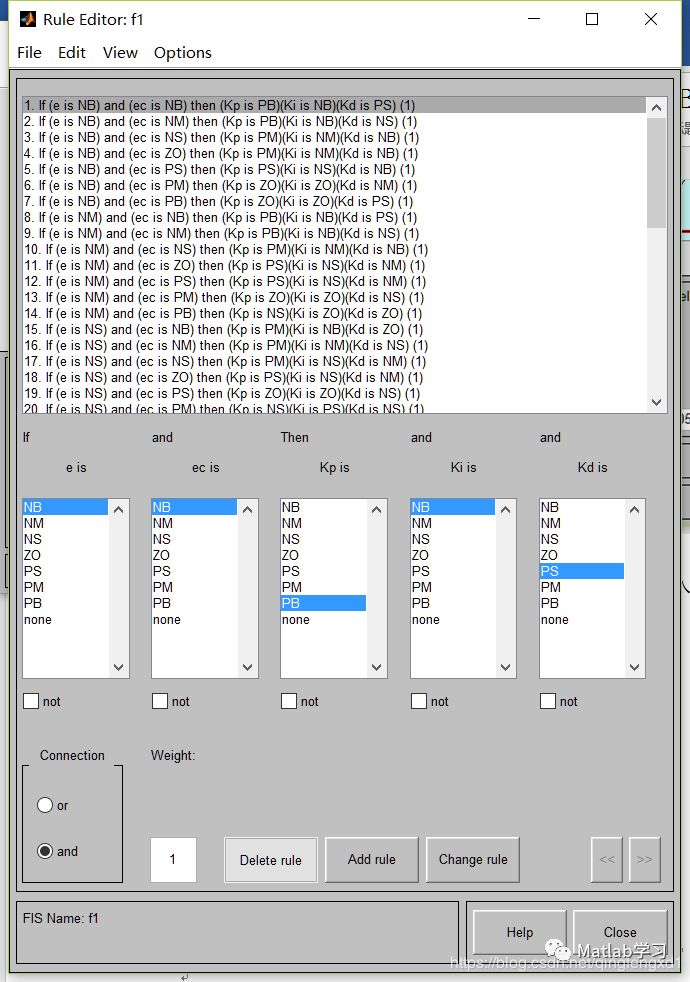
模糊推理编辑器
此时得到的三参数的变化如下图
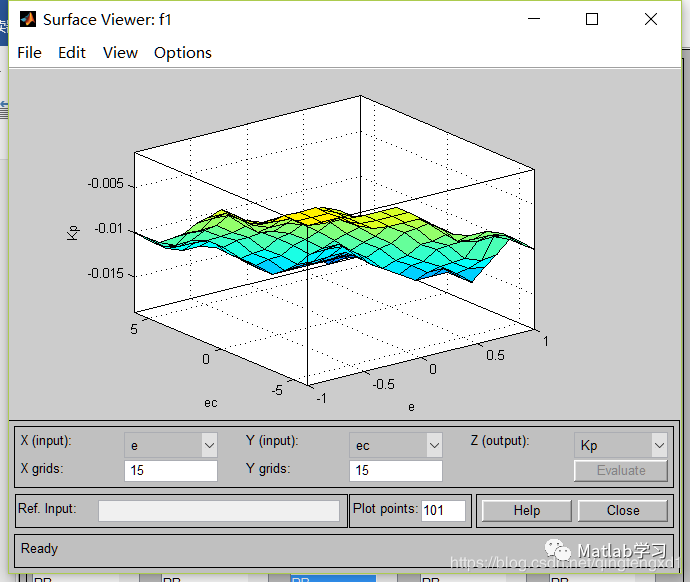
模糊推理KP变化图
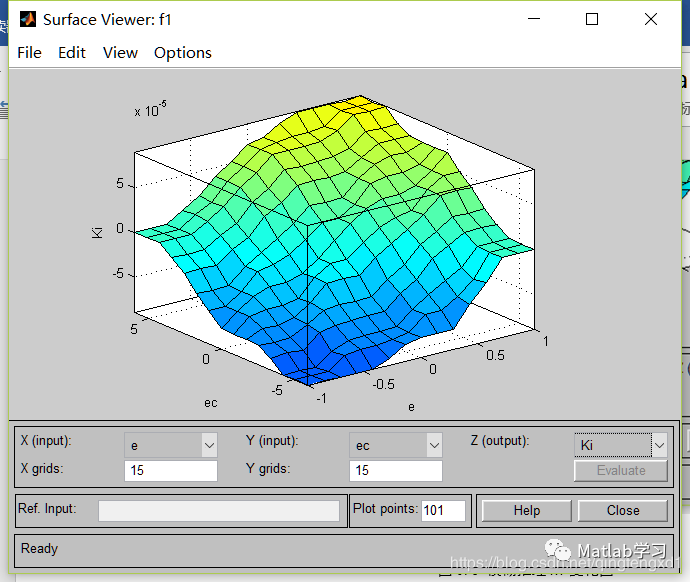
模糊推理KI变化图
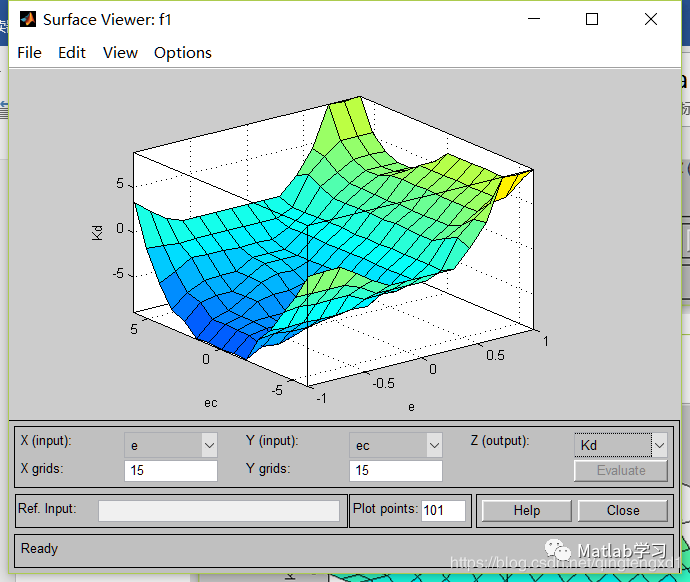
模糊推理KD变化图

运行仿真得到结果