跑马灯程序开发与应用

今天我们来聊聊跑马灯的开发与应用,有不足处望及时给予指正。
以汇川开发环境
功能要求:程序尽量简洁
项目环境:Inoproshop V1.73

硬件组态,CPU AM402及轴SV660N
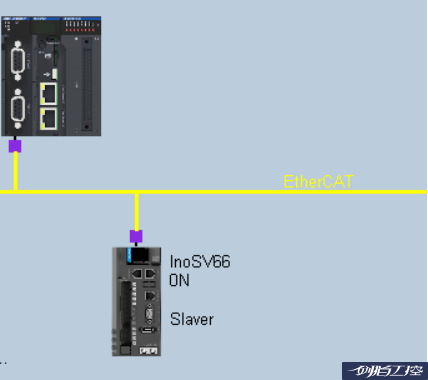
支持EtherCAT最高500us扫描循环
功能要求实现:
显示分度盘盘流工位工况
设:分度盘30个工位,盘位为12度
变量定义:
PART01
比较值: lreal;
灯号: INT;
跑马灯 : ARRAY[1..30] OF BOOL;
程序:
PART02
IF master.fActPosition-比较值>12 THEN
比较值:=比较值+12;
FOR 灯号:=1 TO Index DO
跑马灯[Index -灯号]:=跑马灯[(Index -1)-灯号]; //主盘转时触发
END_FOR
ELSIF master.fActPosition<3 THEN //第一个角位触发
跑马灯[1]:=TRUE;
比较值:=0 ;
灯号:=0;
END_IF
IF 跑马灯[灯号] AND 跑马灯[灯号+1] THEN //前后触发时关闭前级
跑马灯[灯号]:=FALSE;
END_IF重点:
PART03
盘在高速转时master.fActPosition位置值一直在快速变化。
经过仿真我们很实用的实现了项目的设计与应用。

案例经过反复推敲,
可灵活应用其他多样性上开发。
谢谢大家!
作者
蔡双春
职务:电气工程师
个人简介:剑控专家组成员
多年工业自动化项目设计实施经验,熟悉西门子,三菱,AB等主流工控系统。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-01-25,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者
