平面几何:求内接或外切于圆的正多边形

大家好,我是前端西瓜哥。
如题,今天来看两个算法实现。
求和圆内接的正多边形
方法参数有:
- center:圆心位置;
- start:正多边形上的一个点,和 center 的距离即圆的半径;
- count:多边形边数。
返回值为多边形上连续的点数组。
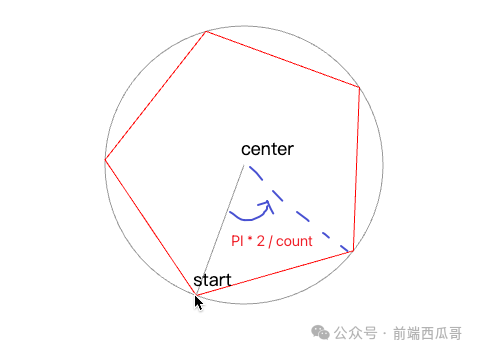
思路是,让起点基于圆心旋转 PI * 2 / count 度数的倍数,执行 count - 1 次,拿到所有的点。
算法实现:
/**
* 计算和圆内接的正多边形
* @param center 圆心
* @param start 起点
* @param count 边数
*/
export const getInternalTanRegularPolygon = (
center: Point,
start: Point,
count: number,
) => {
const points: Point[] = [{ ...start }];
const step = (Math.PI * 2) / count;
for (let i = 1; i < count; i++) {
points.push(rotate(start, center, step * i));
}
return points;
};
这里用到一个辅助方法 rotate:计算一个点以另一个点为旋转中心,旋转特定弧度后的点。
const rotate = (p: Point, center: Point, rad: number) => {
const dx = p.x - center.x;
const dy = p.y - center.y;
const cos = Math.cos(rad);
const sin = Math.sin(rad);
return {
x: center.x + dx * cos - dy * sin,
y: center.y + dx * sin + dy * cos,
};
};
上面这个写法是很朴实的解析几何推导出来的。
或者用矩阵的方式表达,可读性更好,但通常需要引入一个矩阵库,下面是 pixi.js 的写法:
const rotate = (p: Point, center: Point, rad: number) => {
const matrix = new Matrix()
.translate(-center.x, -center.y) // (3) 坐标轴回到原来位置
.rotate(rad) // (2) 旋转
.translate(center.x, center.y); // (1) 坐标轴原点移动到 center
return matrix.apply(p);
};
这里所有的点都是基于起点 start 旋转不同的度数得到的。
也可以基于旋转后的点,继续旋转,这样可以复用旋转矩阵,计算量会少一点。
二者的结果不完全相同,因为各自的实现有各自的误差,但很小,可以忽略不计。
求和圆外切的正多边形
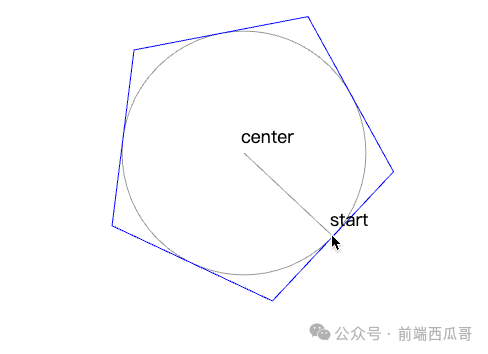
外切要求的效果如下,start 为多边形其中一边的中点,其他同上。
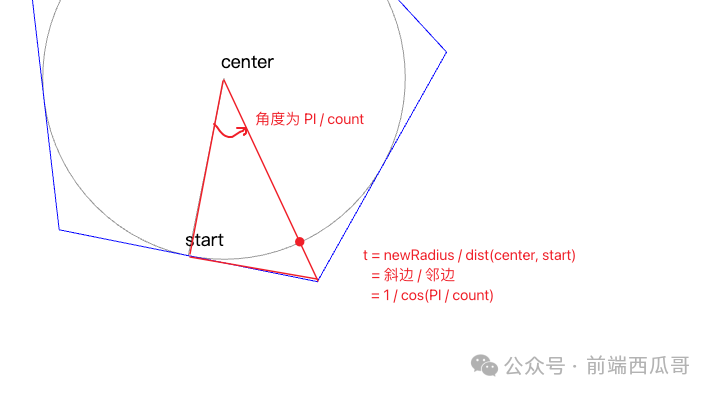
思路是计算一个新的起点 start,然后应用前的的外切方法。
首先 start 基于 center 旋转 PI / count 。
然后计算 外切时半径 和 距离<center, start> 的比值 t,为 1 / cos(PI / count)
基于 t 使用 线性插值,计算出外切时的 start。
如果你不知道线性插值是什么,可以看我的这篇文章: 《平面几何算法:求点到直线和圆的最近点》
算法实现:
/**
* 计算和圆外切的正多边形
* @param center 圆心
* @param start 起点
* @param count 边数
*/
export const getExternalTanRegularPolygon = (
center: Point,
start: Point,
count: number,
) => {
// 转换为内接多边形,计算新的 start
const offsetAngle = Math.PI / count;
start = rotate(start, center, offsetAngle);
const t = 1 / Math.cos(offsetAngle);
start = {
x: center.x + (start.x - center.x) * t,
y: center.y + (start.y - center.y) * t,
};
return getInternalTanRegularPolygon(center, start, count);
};
效果演示
结尾
内接正多边形的思路为:起点基于圆心旋转边数次数,所产生的点集。
外切正多边形,可以转换为求内接,只需要用三角函数和线性插值计算等价的内接下的起点。
我是前端西瓜哥,关注我,学习更多平面几何知识。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-03-22,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录