烛照:使用CMake管理机器视觉后端算法库

大家好我是周旋,欢迎学习【烛照:QT机器视觉软件开发】项目。手把手视频教程已经在网站开始更新:

CMake对于C++工程师来说非常方便,夸张一些来说,不会CMake的不一定是不合格的C++程序员,但学会CMake一定可以成为合格的C++程序员。
本节3.3讲,就通过介绍烛照项目后端光度立体算法库如何使用cmake管理的,来带大家熟悉CMake。
CMake是通过其cmake语言,由我们手动编写来管理我们的源代码,很多东西用文字很难表述,我们直接手把手实战一下就会了:

首先我们在烛照项目路径的src目录下,创建了一个PhotometricStereo文件夹,用来存储我们算法部分的代码。算法部分分为两个部分:
1. PhotometricStereo.h和PhotometricStereo.cpp两个文件组成的算法动态库PhotometricStereo.dll
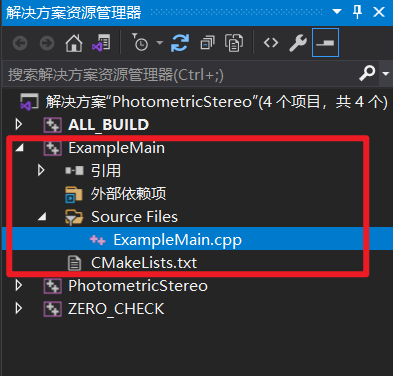
2. 只有算法动态库我们很难查看算法效果,我们还需要一个示例程序,即ExampleMain.cpp,它自己组成一个exe可执行程序,依赖算法动态库PhotometricStereo.dll,用来展示效果
工程管理使用cmake,所以我们需要手动生成txt在源码根目录,也就是src/PhotometricStereo目录内创建一个CMakeLists.txt。注意,为什么必须是CMakeLists.txt?因为CMake在编译工程的时候,只会寻找CMakeLists.txt文件进行编译,就像C++只会编译.h和.cpp一样。
我们的CMakeLists.txt编写内容如下:
# S.0工程创建
CMAKE_MINIMUM_REQUIRED(VERSION 3.22)
PROJECT(PhotometricStereo)
set(CMAKE_CXX_STANDARD 11)
# S.1寻找第三方库
FIND_PACKAGE(OpenCV REQUIRED)
# S.2创建光度立体算法动态库
FILE(GLOB
DLL_SRCS
PhotometricStereo.cpp
PhotometricStereo.h
)
add_library(PhotometricStereo SHARED ${DLL_SRCS})
TARGET_LINK_LIBRARIES(PhotometricStereo ${OpenCV_LIBS})
# S.3创建光度立体算法的示例程序
FILE(GLOB
EXAMPLE_SRCS
ExampleMain.cpp
)
add_executable(ExampleMain ${EXAMPLE_SRCS})
TARGET_LINK_LIBRARIES(ExampleMain ${OpenCV_LIBS} PhotometricStereo)1、工程创建
# S.0工程创建
CMAKE_MINIMUM_REQUIRED(VERSION 3.22)
PROJECT(PhotometricStereo)
set(CMAKE_CXX_STANDARD 11)我们使用CMAKE_MINIMUM_REQUIRED强调了我们CMake的最低版本,因为不同版本的CMake虽然是相互兼容的,但避免大家使用的版本过低,我们通常会使用CMAKE_MINIMUM_REQUIRED来检查一下最低版本。如果版本低于3.22,是无法进行cmake编译的。
PROJECT(PhotometricStereo)声明了解决方案名称,就叫PhotometricStereo,这个解决方案名称和VS中的解决方案名称是对应的:

set(CMAKE_CXX_STANDARD 11)设置了C++的版本,因为C++有11、14、17、20等等若干版本,有些高级语法只在较高版本的C++中支持,所以我们设定C++的版本是C++11。
2、创建第三方库
# S.1寻找第三方库
FIND_PACKAGE(OpenCV REQUIRED)我们的算法库依赖于opencv,所以我们需要使用FIND_PACKAGE来寻找opencv库。FIND_PACKAGE会在系统目录内朝查找所有路径,在里面寻找opencv库,所以想让FIND_PACKAGE成功找到opencv库的话,我们必须预先在系统环境目录内配置好opencv的路径。
3、创建算法动态库目标
# S.2创建光度立体算法动态库
FILE(GLOB
DLL_SRCS
PhotometricStereo.cpp
PhotometricStereo.h
)
add_library(PhotometricStereo SHARED ${DLL_SRCS})
TARGET_LINK_LIBRARIES(PhotometricStereo ${OpenCV_LIBS})FILE命令会将我们所罗列的所有文件,即 PhotometricStereo.cpp和PhotometricStereo.h两个文件,存放到文件列表DLL_SRCS中。add_library则将DLL_SRCS文件列表的所有文件,都加入到了PhotometricStereo目标中,这个对应我们VS中的项目名称:
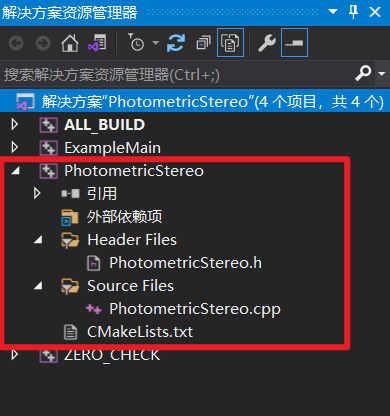
我们编译PhotometricStereo这个项目,会生成PhotometricStereo.dll动态库。
TARGET_LINK_LIBRARIES是链接第三方库,我们说过很多遍了,光度立体算法是依赖opencv算法动态库的,所以我们调用TARGET_LINK_LIBRARIES,为PhotometricStereo链接上我们前面调用FIND_PACKAGE所找到的opencv动态库。
4、创建光度立体算法示例程序
# S.3创建光度立体算法的示例程序
FILE(GLOB
EXAMPLE_SRCS
ExampleMain.cpp
)
add_executable(ExampleMain ${EXAMPLE_SRCS})
TARGET_LINK_LIBRARIES(ExampleMain ${OpenCV_LIBS} PhotometricStereo)这里和前面不同的是,我们使用add_executable,创建了一个ExampleMain目标,编译这个项目,会生成一个ExampleMain.exe文件,是一个可执行文件。
我们使用TARGET_LINK_LIBRARIES,为ExampleMain增加了依赖库,依赖opencv和PhotometricStereo两个动态库。
5、编译生成后端工程项目
前面我们写好了cmake代码,接下来做什么呢,编译运行cmake,生成VS工程。
首先打开我们的CMake-GUI,如下图操作:

1. 选择源码路径,就是我们根CMakeLists.txt文件所在路径
2. 选择输出路径,一般是在源代码的统计目录,创建一个新的名为build的文件夹,但其实路径和名称可以是任意的
3. 点击配置按钮
4. 点击生成按钮
5. 点击打开工程,会直接打开VS工程
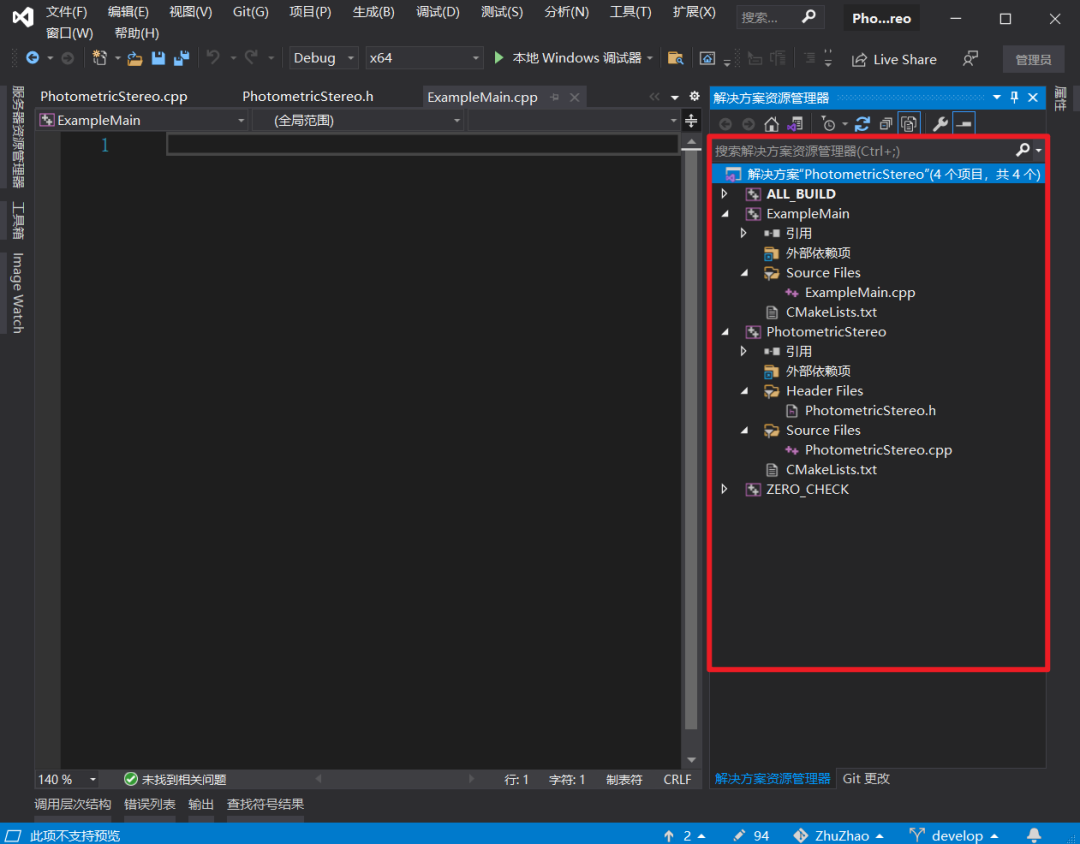
至此,我们后端的项目工程也搭建起来了,可以愉快的写后端的算法代码了。
THE END