案例松下A6B伺服与欧姆龙PLC实现EtherCAT通讯


松下伺服与欧姆龙PLC实现EtherCAT通讯配置指南
一、工程创建与基础配置
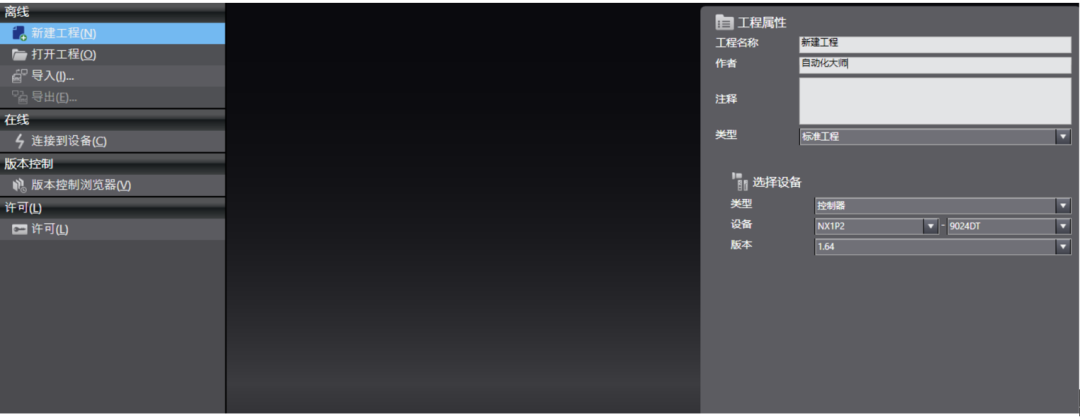
- 新建工程
- 打开Sysmac Studio,新建工程,选择对应的欧姆龙PLC控制器及版本型号。
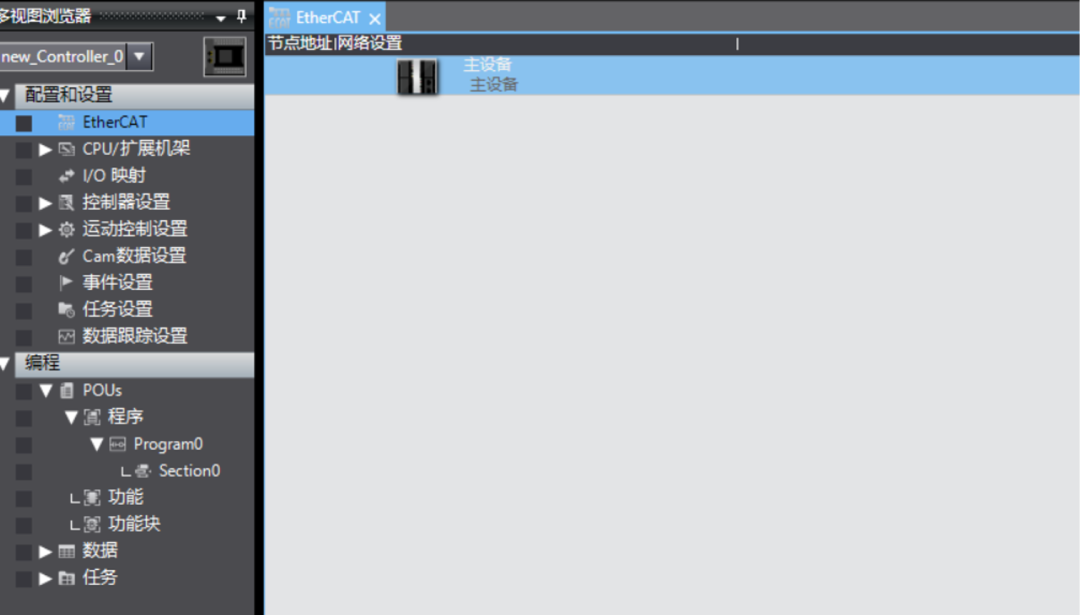
- 进入EtherCAT配置界面
- 打开配置和设置,右键点击“EtherCAT - 编辑”。
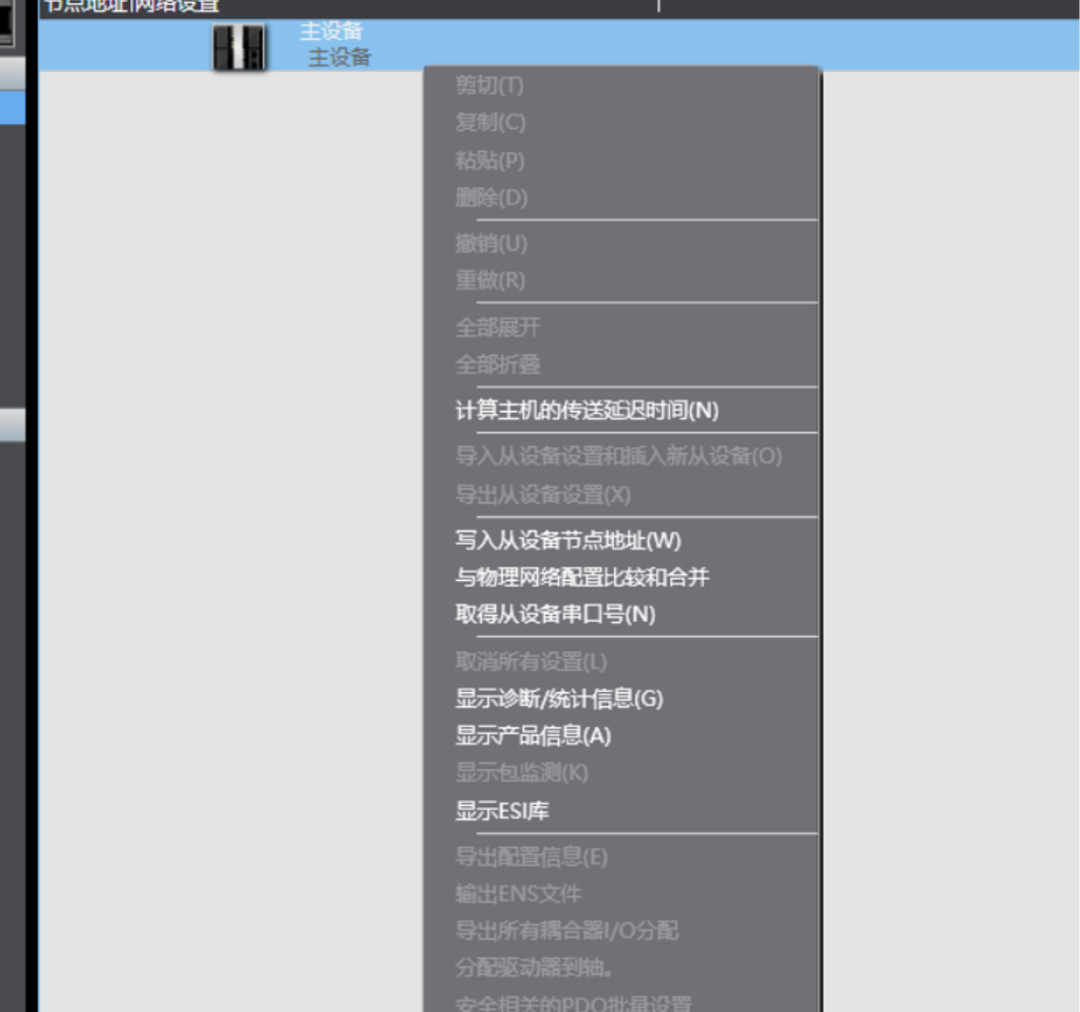
二、EtherCAT设备配置
- 显示ESI库
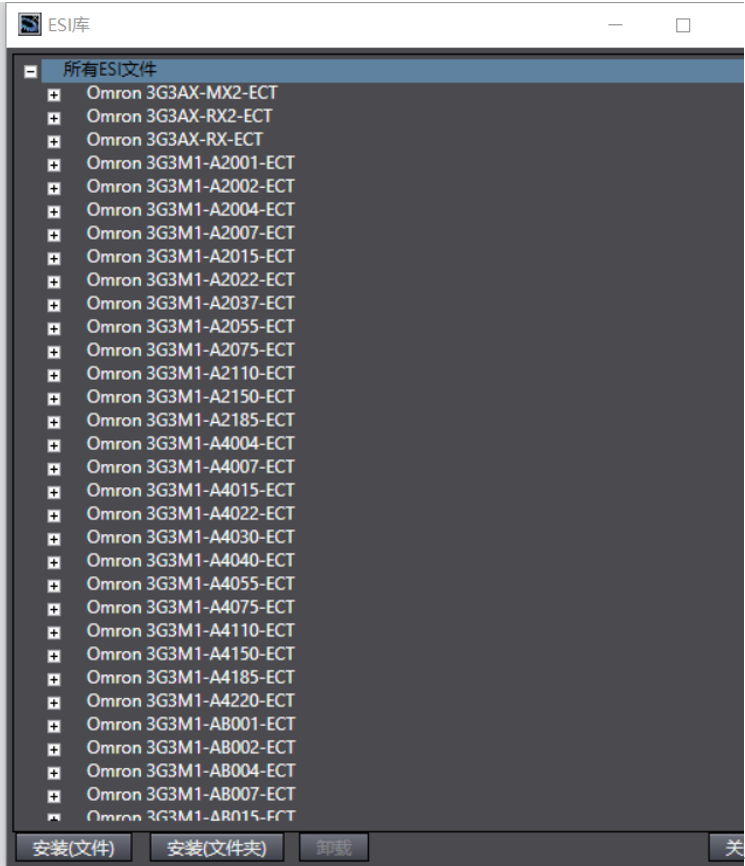
- 右键点击主设备,选择“显示ESI库”。
- 安装配置文件
- 在指定路径安装EtherCAT配置文件。
- 添加驱动型号
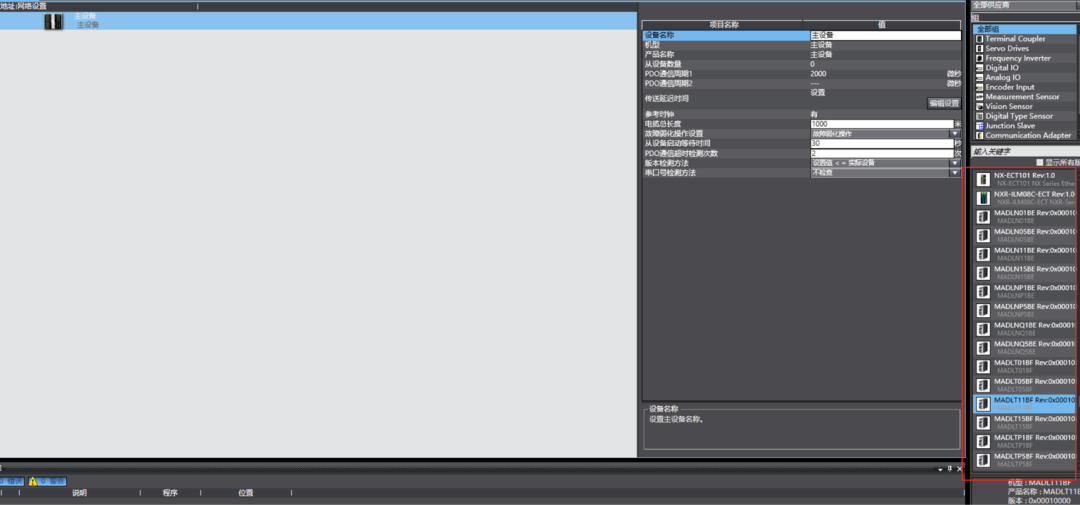
- 配置文件安装完成后,在右侧菜单栏或ESI库中选择对应的松下伺服驱动型号,双击添加。
- 网络配置比较与合并
- 点击控制器 - 在线 - 主设备 - 右键 - “与物理网络配置比较和合并”。在此之前,需保证驱动器之间的物理节点不冲突。
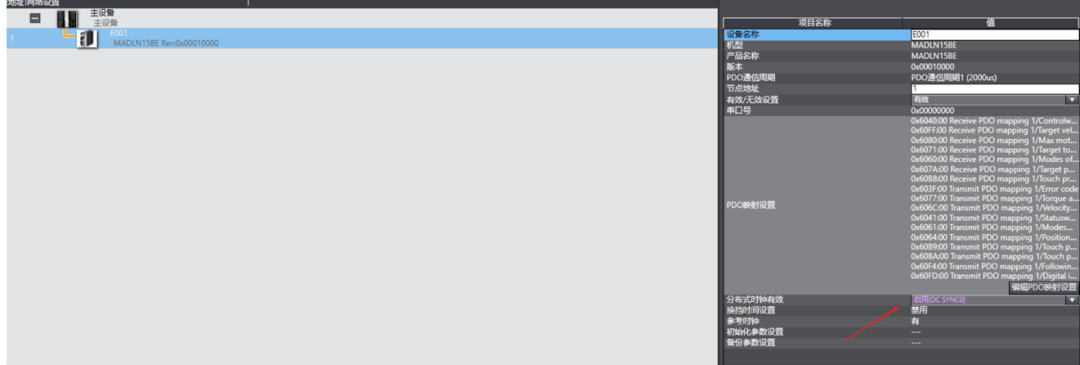
三、PDO映射配置
启用分布式时钟
- 将分布式时钟设置为“启用”。
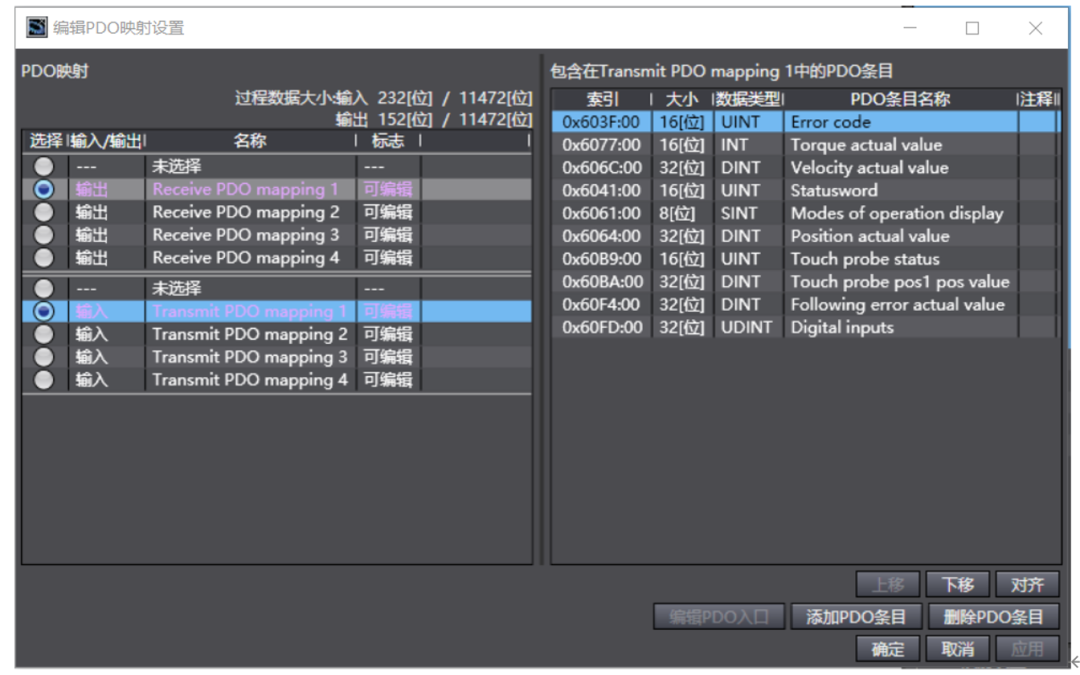
设置输入映射
- 点击“PDO映射”,设置输入映射参数。
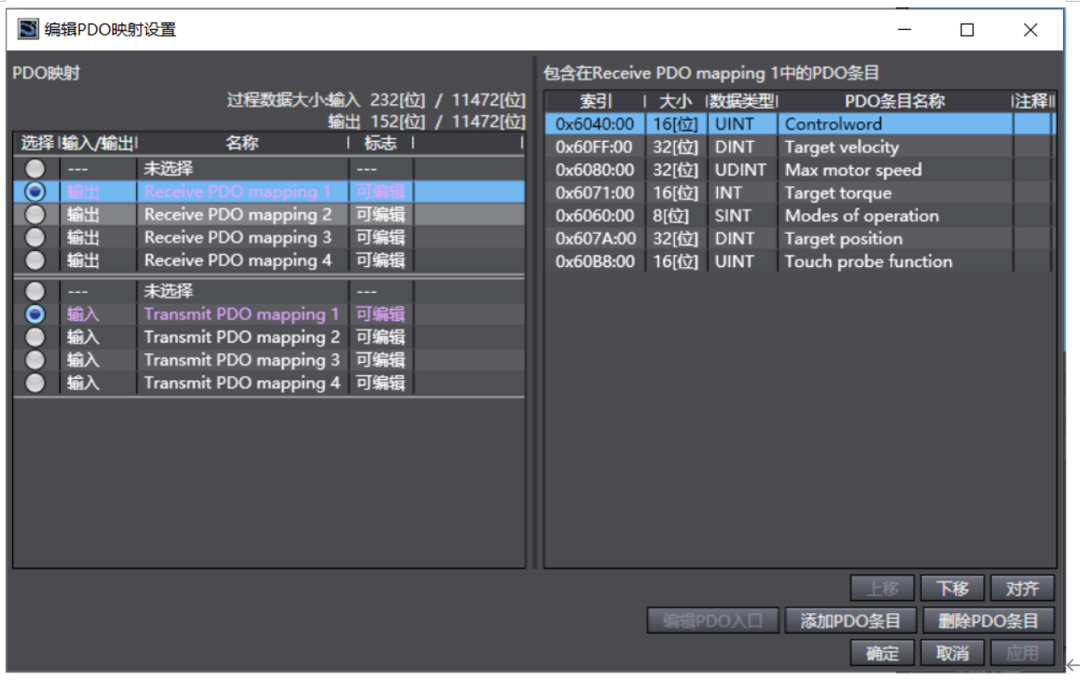
设置输出映射
- 设置输出映射参数,设置完成后点击“应用”。
四、轴设置
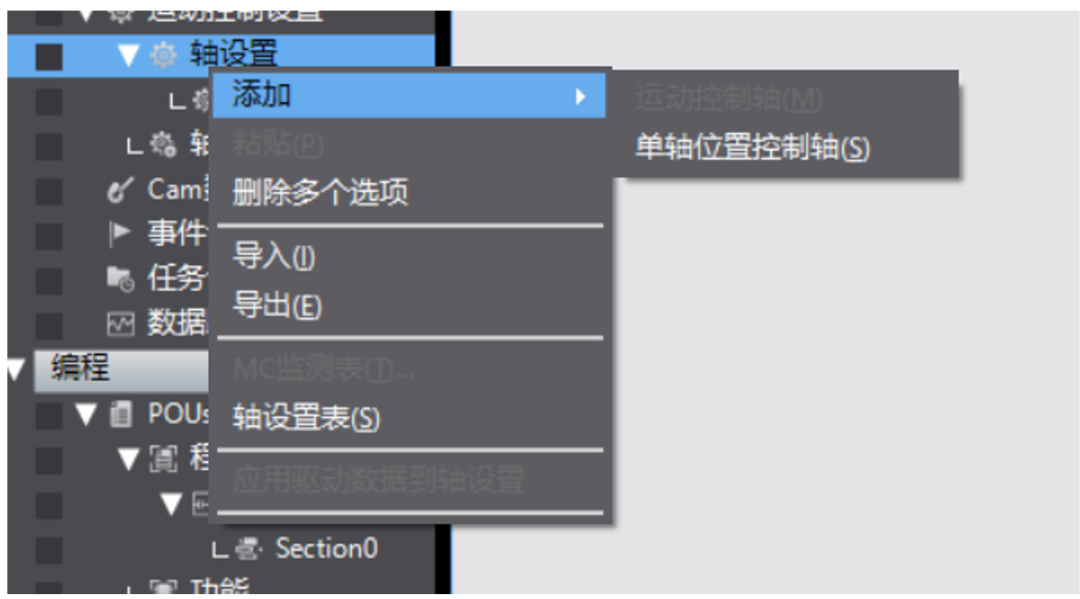
添加单轴控制轴
- 右键点击轴设置,选择“添加单轴控制轴”。
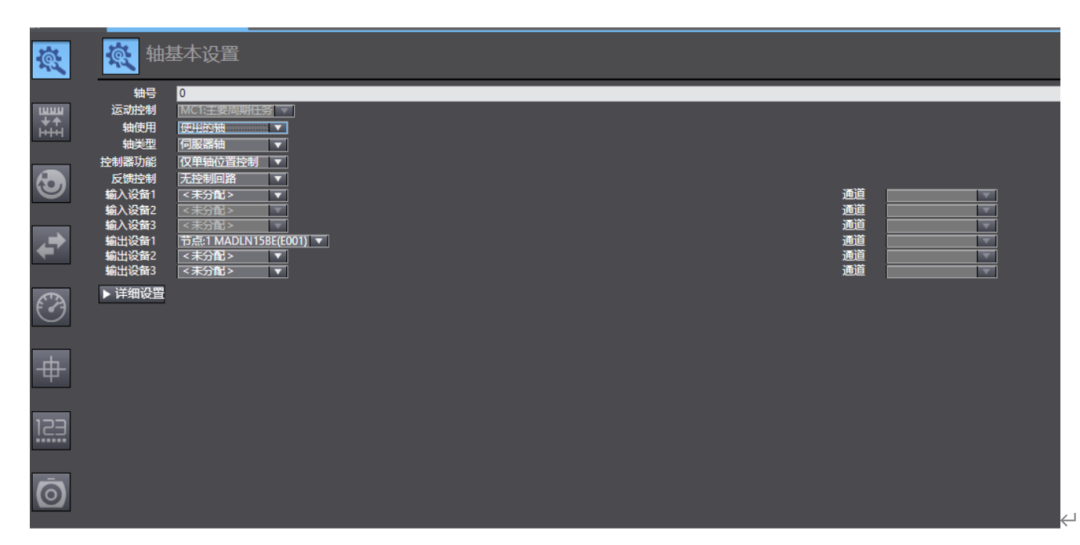
轴基本设置
- 设置轴号。
- 将“轴使用”设置为“使用的轴”。
- 将“轴类型”设置为“伺服器轴”。
- 将“控制器功能”设置为“仅单轴控制”。
- 将“输入设备1”设置为对应的驱动器节点。
- 点击刚添加的轴,进入轴基本设置界面:
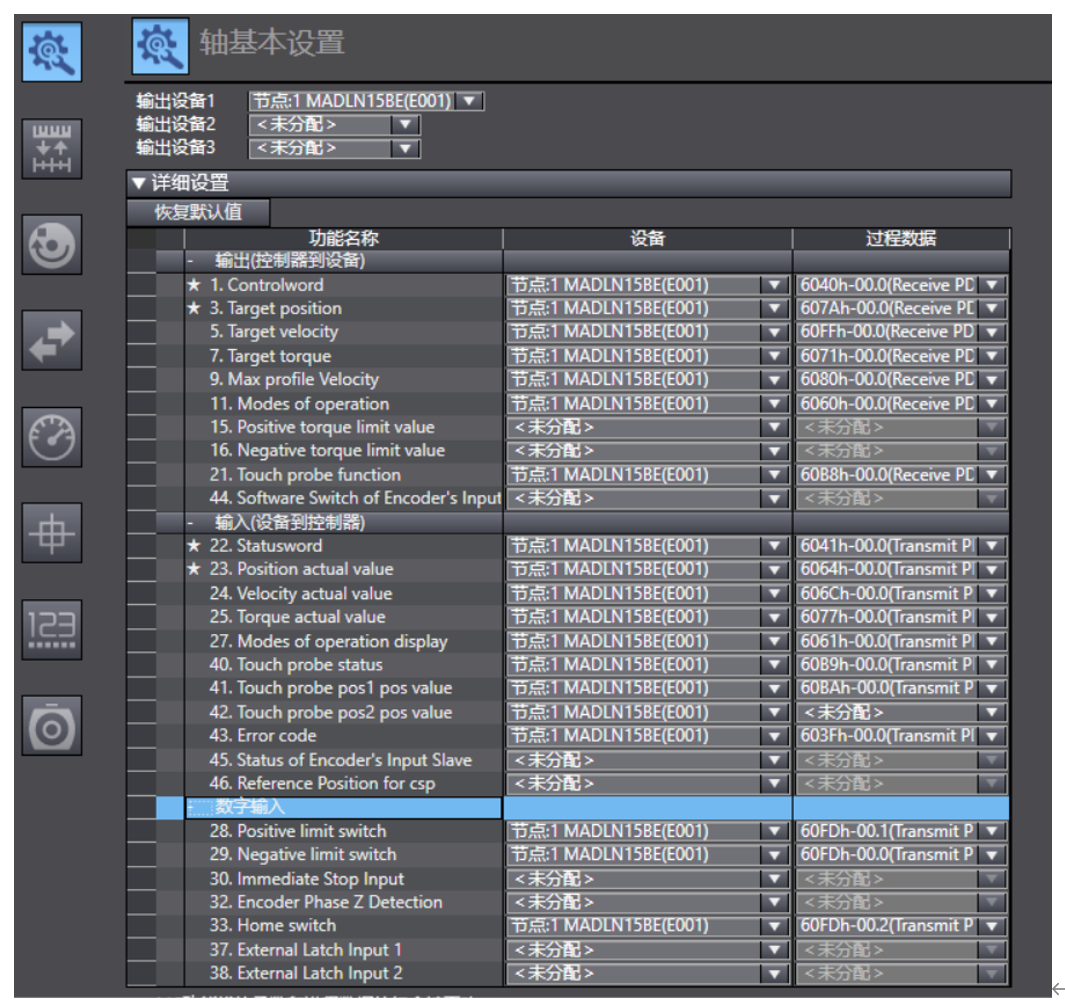
轴详细设置
- 点击“详细设置”,分别设置输出、输入、数字输入参数。
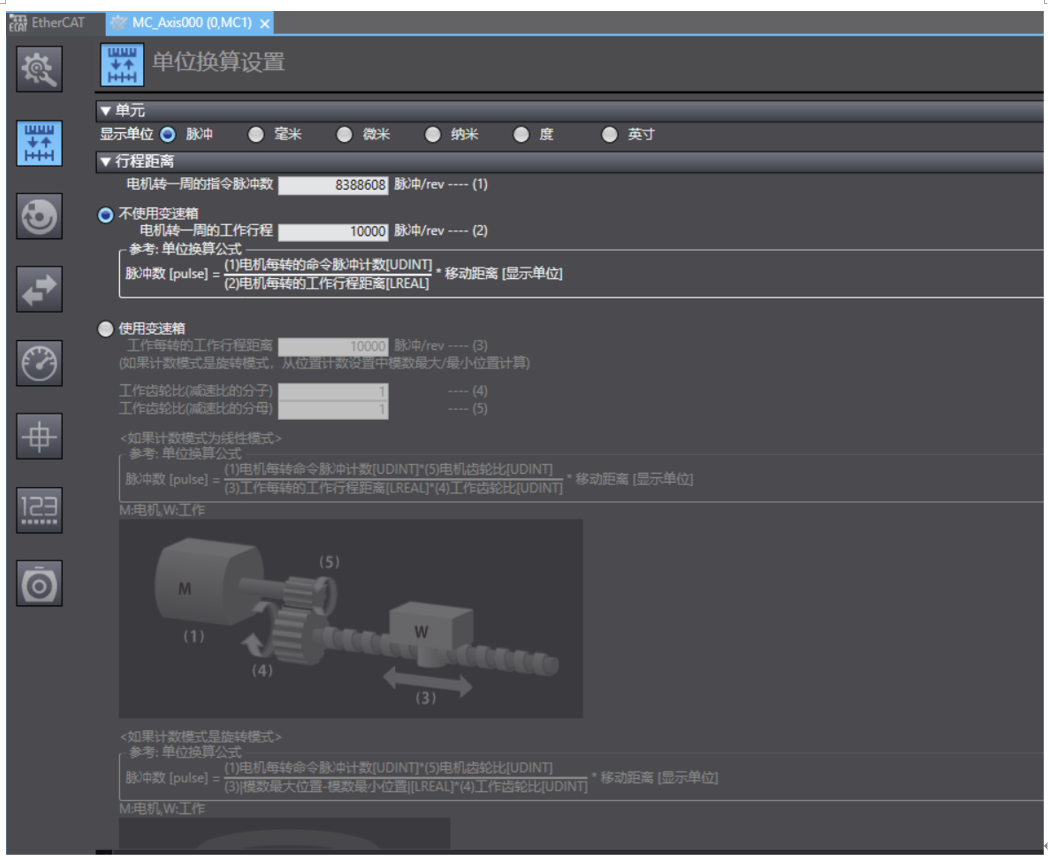
单位换算设置
- 单元设置:设置为“脉冲”。
- 电机转一周的指令脉冲数:设置为电机编码器分辨率(如8388608)。
- 转一周的工作行程:设置为10000(表示旋转一周需要10000个脉冲)。也可通过PANATERM软件 - 对象编辑器 - 对6092 - 01h设置单圈值(如6092 - 01h设为10000,效果与上述方法相同,上位侧分子分母均为默认值)。
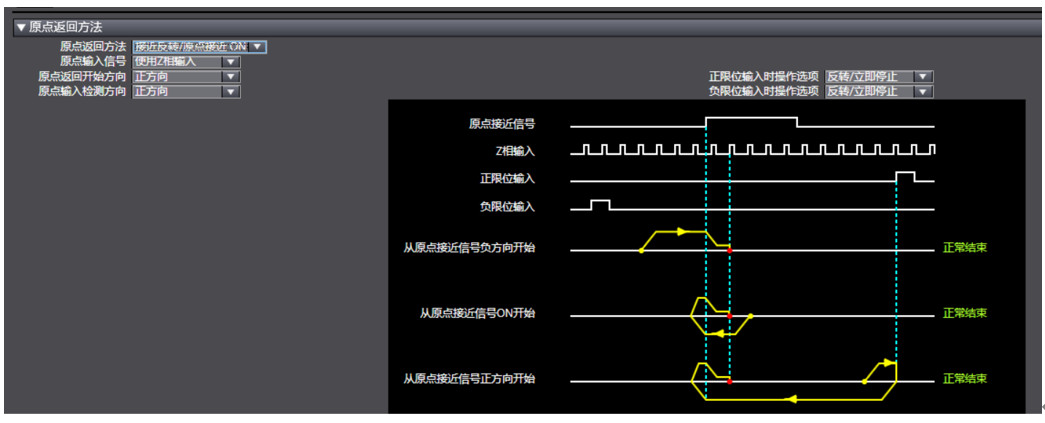
原点返回设置
- 在原点返回设置中设置原点返回方式,可参考时序图进行调试。
五、伺服设置
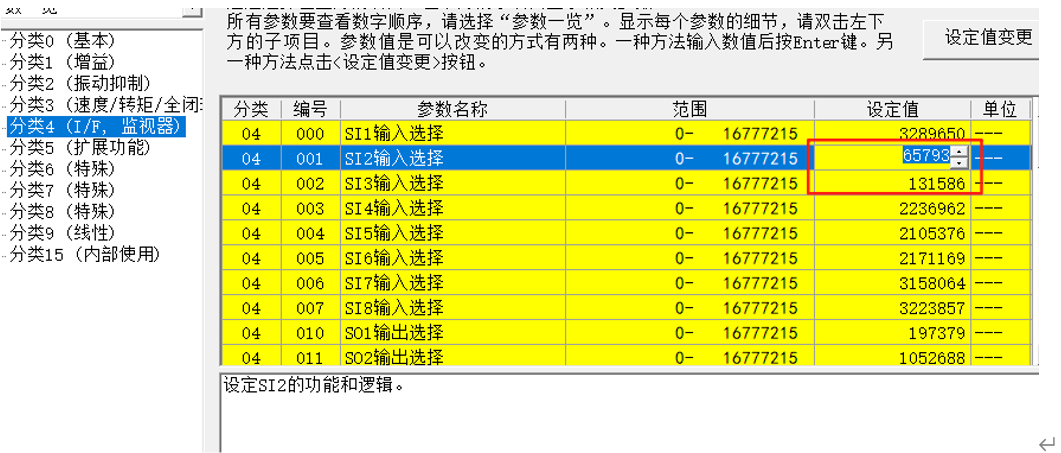
- 屏蔽极限信号(若伺服本体不接正负极限)以下是将松下伺服相关信号设置
信号类型 | 信号标识 | 常开设置(十六进制) | 常闭设置(十六进制) |
|---|---|---|---|
正极限 | SI2 | 010101H | 818181H |
负极限 | SI3 | 020202H | 828282H |
原点 | SI4 | 222222H | A2A2A2H |
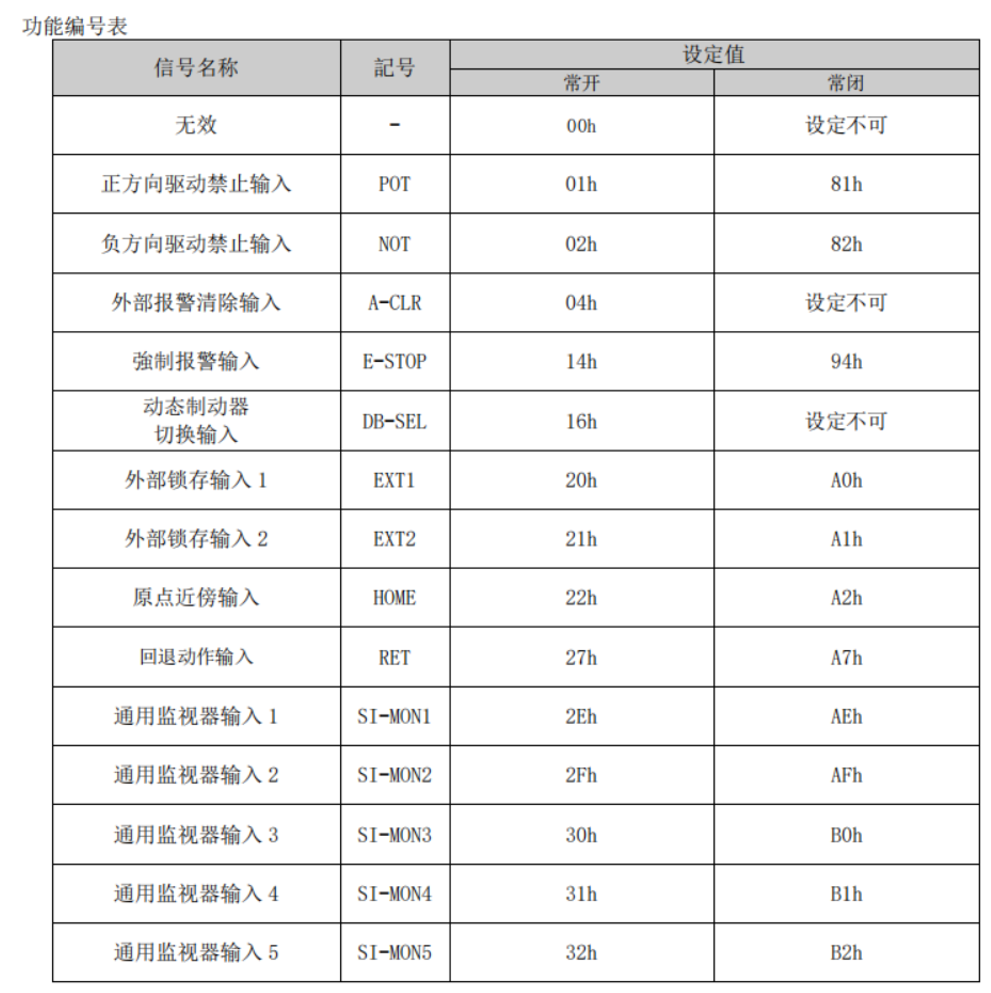
DI功能编号表:
六、编程
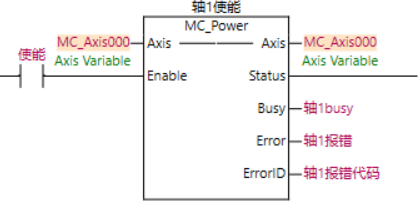
- 伺服使能:使用
MC - POWER指令。
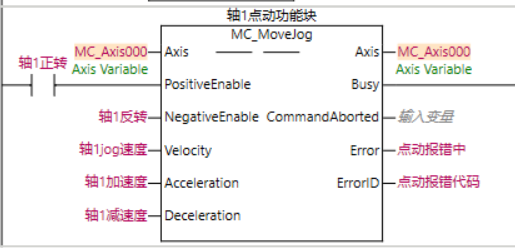
JOG点动:使用MC - MOVEJOG指令。
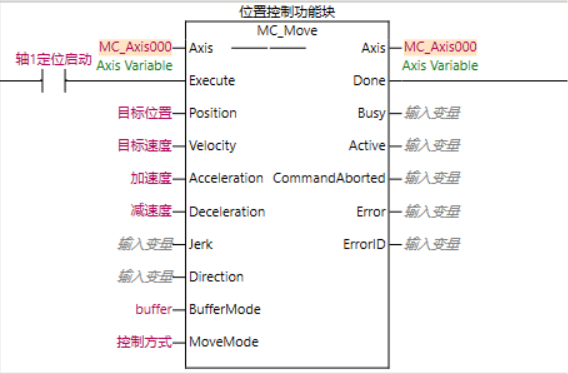
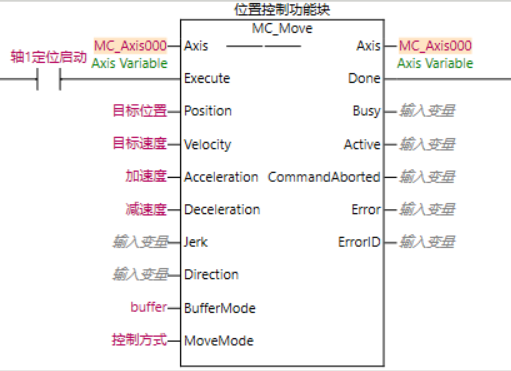
位置控制:使用MC - MOVE指令
停止:使用MC - STOP指令。
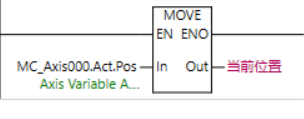
备注:当前位置值存在MC_Axis000.Act.Pos,需要其他数据可参考下列程序自行读取
变量名称 | 说明 |
|---|---|
MC_AX[0] | 轴变量 |
MC_AX[0].Status | 轴状态 |
MC_AX[0].Status.Ready | 轴启动准备完成 |
MC_AX[0].Status.Disabled | 轴无效 |
MC_AX[0].Details | 轴控制状态 |
MC_AX[0].Details.Idle | 停止中 |
MC_AX[0].Details.InPosWaiting | 到位等待 |
MC_AX[0].Cmd | 轴指令值 |
MC_AX[0].Cmd.Pos | 指令当前位置 |
MC_AX[0].Cmd.Vel | 指令当前速度 |
MC_AX[0].Cmd.AccDec | 指令当前加减速度 |
MC_AX[0].Act | 轴当前值 |
MC_AX[0].Act.Pos | 反馈当前位置 |
MC_AX[0].Act.Vel | 反馈当前速度 |
MC_AX[0].Cfg | 轴基本设定 |
MC_AX[0].Cfg.AxNo | 轴号 |
MC_AX[0].Cfg.AxEnable | 轴使用 |
MC_AX[0].Cfg.AxType | 轴种类 |
MC_AX[0].Scale.Units | 显示单位 |
MC_AX[1] | 轴变量 |
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-05-16,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者
