MOV.AI Flow 可视化ROS IDE
MOV.AI Flow 可视化ROS IDE

flow.mov.ai/docs/introducing-movai
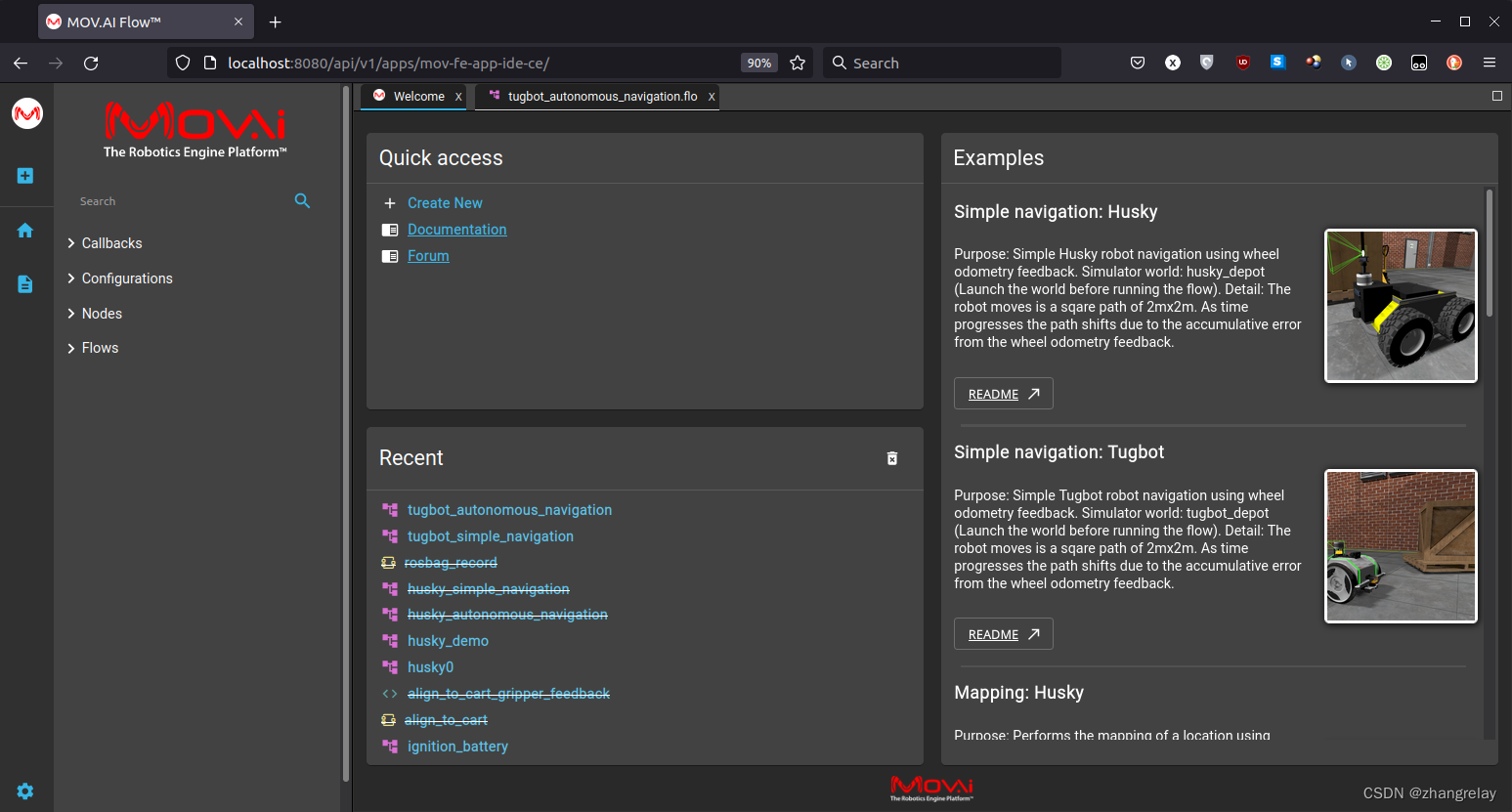
MOV.AI Flow一个建立在ROS(机器人操作系统)之上的开发平台,使开发机器人软件变得容易。它为ROS带来了可视化和结构,使您可以更快地开发、即时了解ROS项目并轻松调试。它旨在加速机器人开发,促进现场部署机器人的部署、操作和支持。大大有助于快速直观地开发ROS项目。
https://files.readme.io/f5877dc-tugbot_warehouse1.gif
IDE通过ROS项目的可视化表示加快了机器人软件开发的速度,使其易于理解ROS项目,并允许简单直观的开发。导入资产更容易,减少了配置和集成工作,并使跨环境移植项目和与社区共享变得容易。 MOV.AI Flow™ 包括:
- 可视化ROS编辑器
- 内置可视状态机和节点编排
- 回调编辑器
- 配置编辑器
- 可视化调试
- 与ROS生态系统的开箱即用集成
- 易于移植到运行时环境
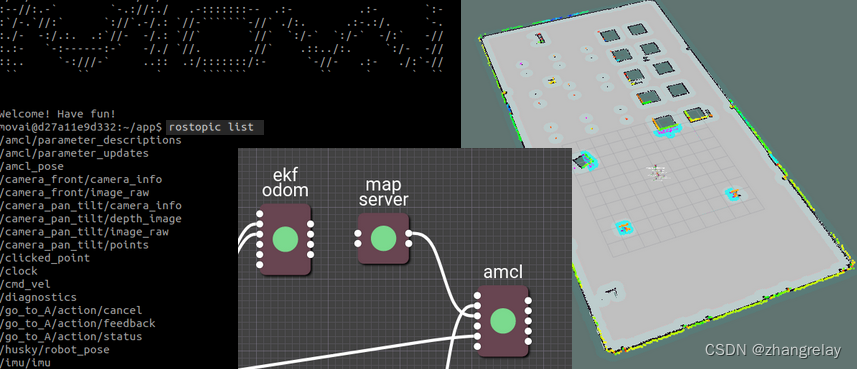
基于Web的可视化ROS编辑器
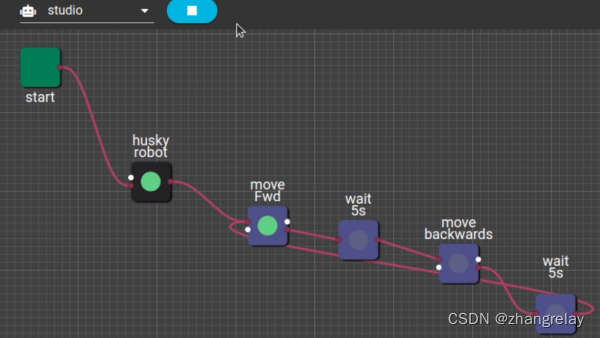
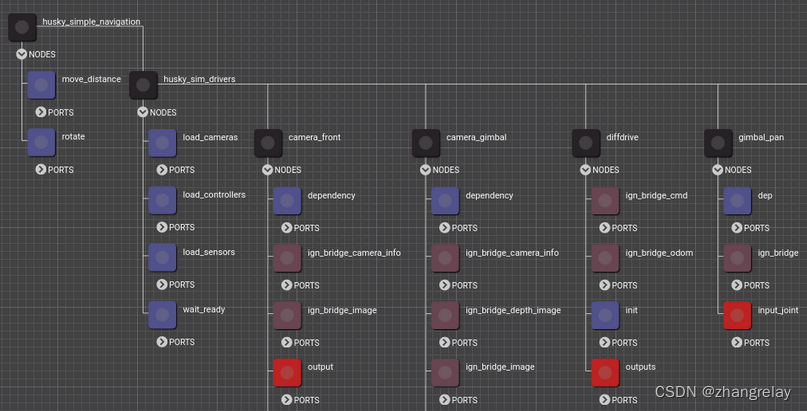
内置可视状态机和节点编排
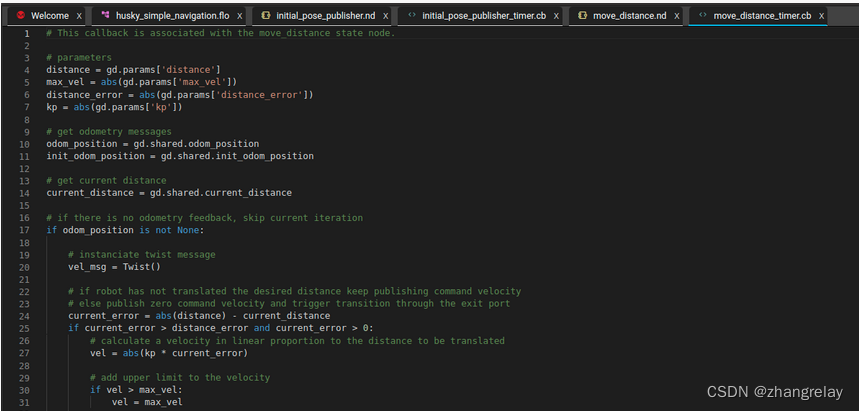
回调编辑器
可视化调试
配置编辑器
与ROS生态系统的开箱即用集成
软件提供了四个现成功能的演示。四个MOV。这里展示的AI流程在仓库环境中运行。每个流程都基于上一个流程中提供的选项,以演示如何在Tugbot或Husky机器人或您选择的任何机器人上创建完整的实现。 每一个都预先集成,并在Gazebo Fortress中提供了现成的模拟,有些还提供了RViz中的可视化。 当我们带您完成四个演示的导游之旅时,我们希望通过各种现成的MOV给您留下深刻印象。人工智能流程、节点、回调、代码开发工具、模拟、开发选项和节省劳动力的功能,ROS开发人员可以利用这些功能显著加快ROS开发过程。软件是一种在标准笔记本电脑上的标准浏览器中操作的机器人流程设计工具。 简单机器人导航–本课程演示MOV。AI使用机器人里程计反馈的简单机器人导航流程。这个演示展示了使用MOV是多么容易。软件以控制任何机器人。它展示了哈士奇机器人和Tugbot机器人在点火Gazebo仓库世界中以2米x 2米的正方形模式进行的透明集成模拟导航。 建图–本课演示MOV。AI映射流程以及如何将其用于任何需要全局定位功能的机器人。本课将向您展示MOV。AI流使Tugbot或Husky机器人能够通过在整个区域内移动来绘制其将要运行的环境,以便在其环境中定位。 自主导航–本课程演示MOV。人工智能的自主导航流程使机器人能够知道它在地图上的位置,知道它必须到达的目的地(目标),自主确定到达该点的路径,以及处理沿途的动态障碍物(例如走过的人)。 拾取和放置–本课程演示了一个真实的拾取和放置工作MOV。AI流程。它发生在前面课程中描述的类似仓库中,不同的是该仓库被划分为不同的区域——提货区、卸货区和充电区。提供了Gazebo Fortress地图和RViz地图,您可以看到机器人离开充电站,前往取车站,取车,前往下车站,将车留在那里,然后返回充电站。 本指南中介绍的每个演示都描述了如何在MOV提供的模拟环境中播放(运行)它。AI,以及打开每个流并查看/修改其定义。实际上,可以在阅读本指南时执行本指南中显示的步骤。还可以使用此处提供的流作为您自己项目的基础,或更改它们以适合您在虚拟或现实世界中开发的任何机器人。