Kalman滤波通俗理解+实际应用
原创Kalman滤波通俗理解+实际应用
原创
作者 | 南叔先生
01 Kalman用于解决什么的问题
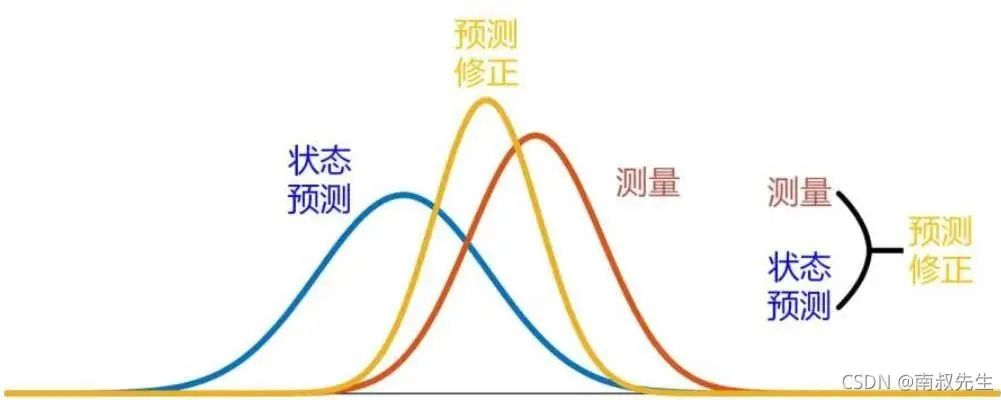
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
人话就是:线性数学模型算出预测值+传感测量值=更准确的测量值。
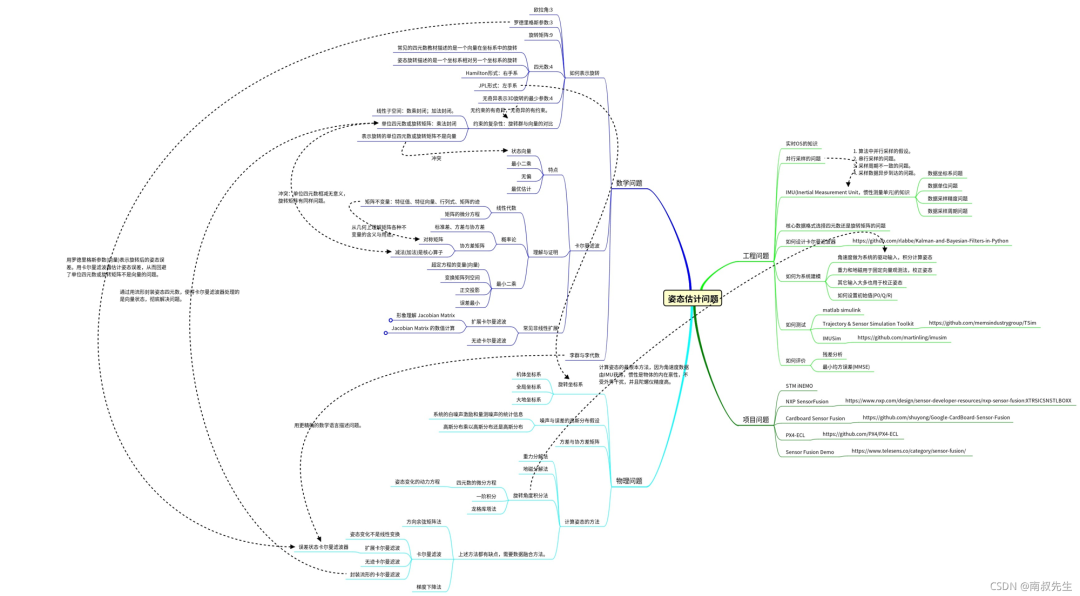
02 先来看一下姿态估计问题
03 看几个例子
3.1 例题1
假设有一个标量系统,信号与观测模型为:
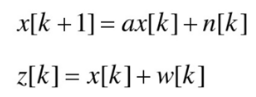
其中a为常数,n[k]和w[k]是不相关的零均值白噪声,方差分别为\sigma^2_n 和\sigma^2 。系统的起始变量x[0]为随机变量,其均值为零,方差为P_x[0] 。
(1)求估计x[k] 的卡尔曼滤波算法;
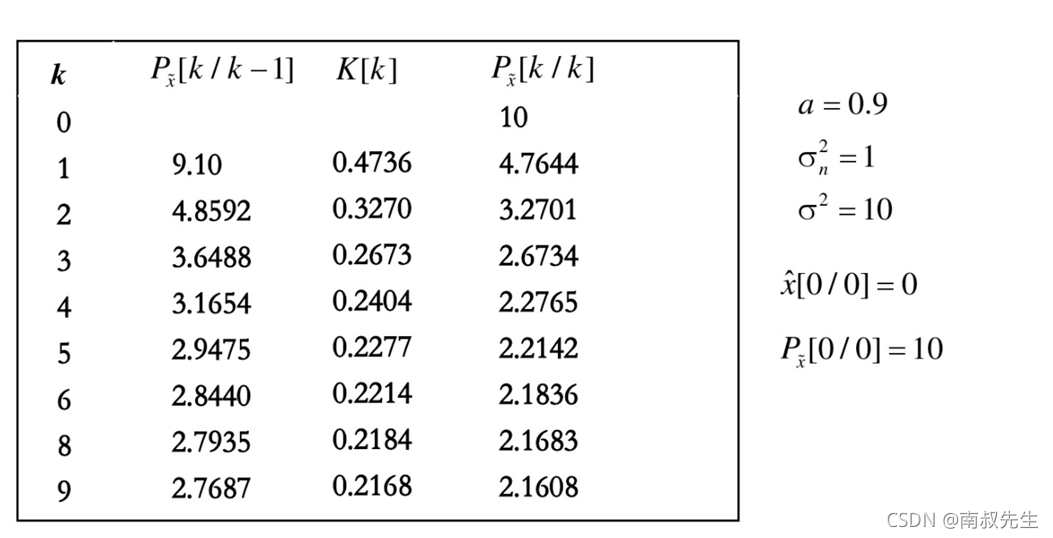
(2)当a=0.9,\sigma^2_n=1,\sigma^2=10,P_x[0]=10 时的卡尔曼滤波增益和滤波误差方差。
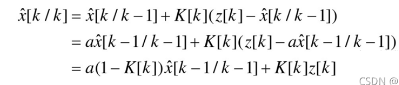
根据卡尔曼算法,预测方程为:

预测误差方差为:

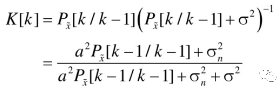
卡尔曼增益为:
滤波方程:
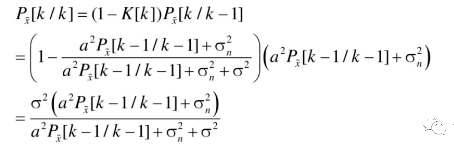
滤波误差方差
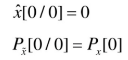
起始:
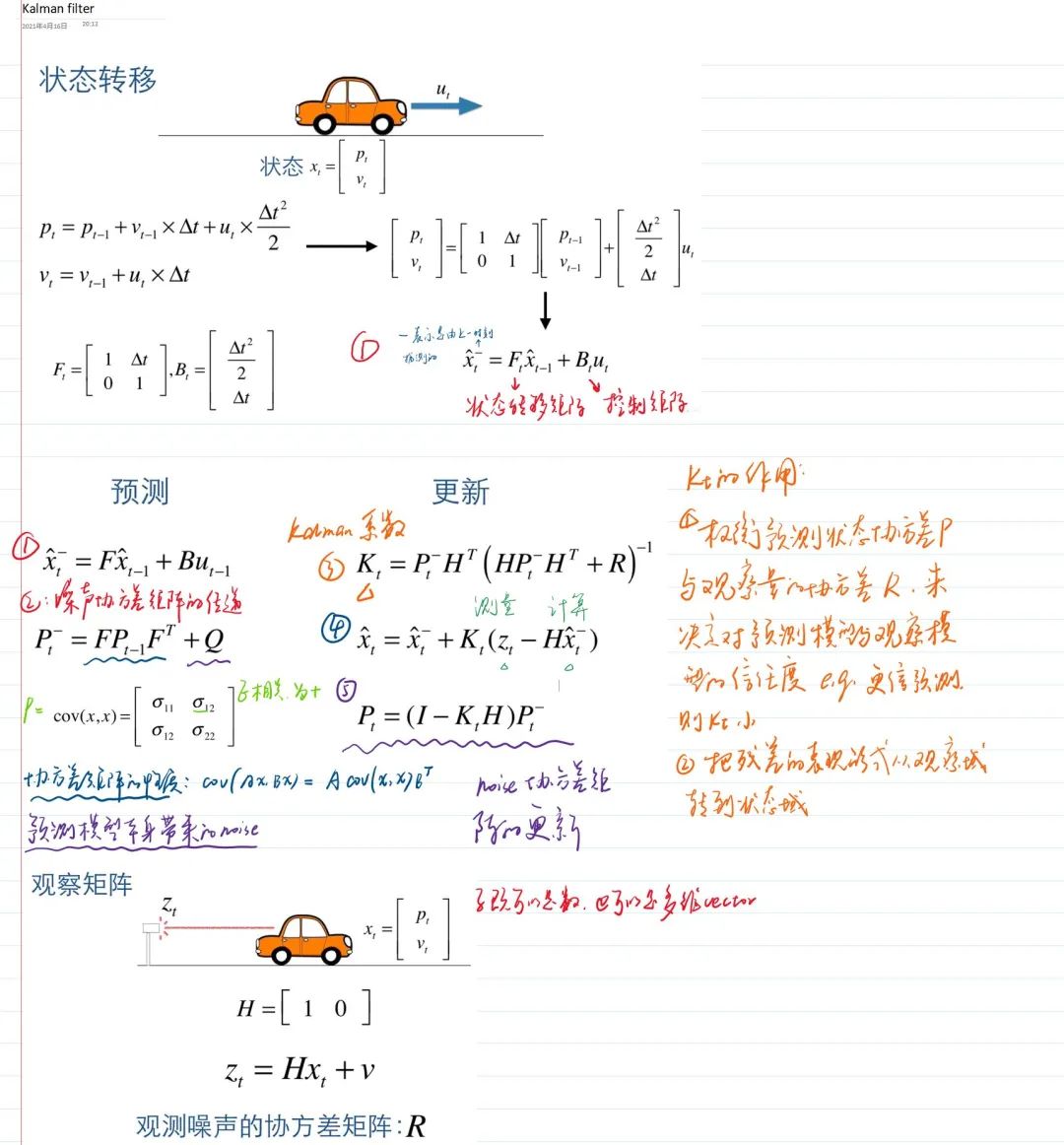
3.2 例题2——运动模型,写出匀加速运动的状态转移方程
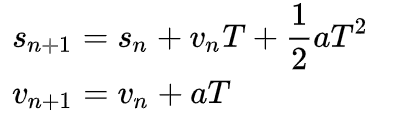
第一步,根据基本的物理运动方程,写出状态方程
第二步,写出观测方程模型
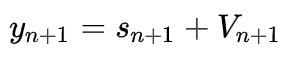
我开始也不明白这个观测方程是啥意思,实际上这是模拟传感器的测量值,S代表位移,V代表误差。这里代表目标测量量为位移。
第三步,将第一步和第二步的状态方程与观测方程写成矩阵形式
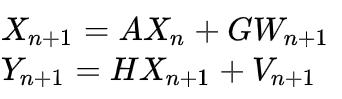
根据对应关系,可以得到系数:

其中A叫做状态转移矩阵,G叫做控制矩阵,H叫做预测矩阵
给定一个初值,就可以迭代得到后面的值了。
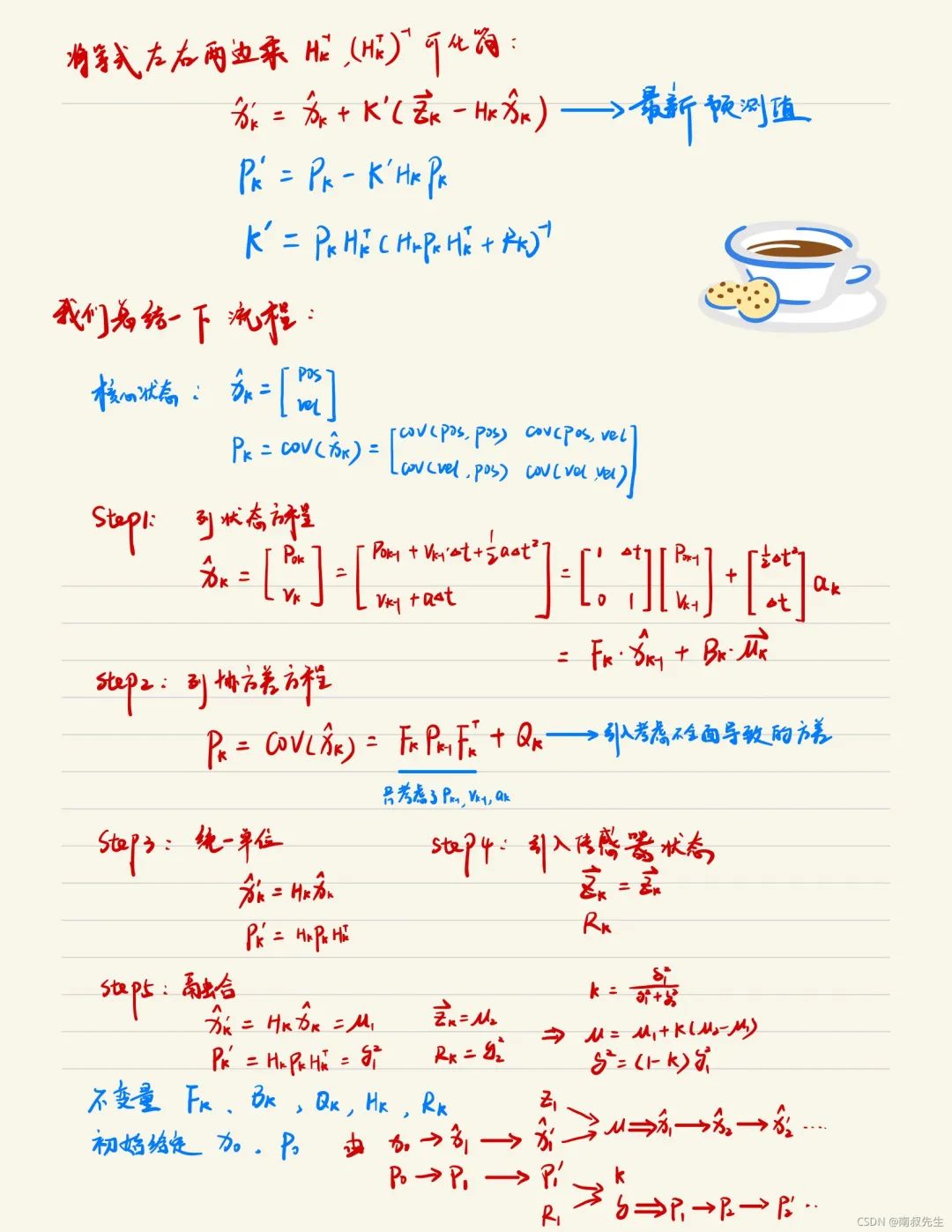
04 计算流程
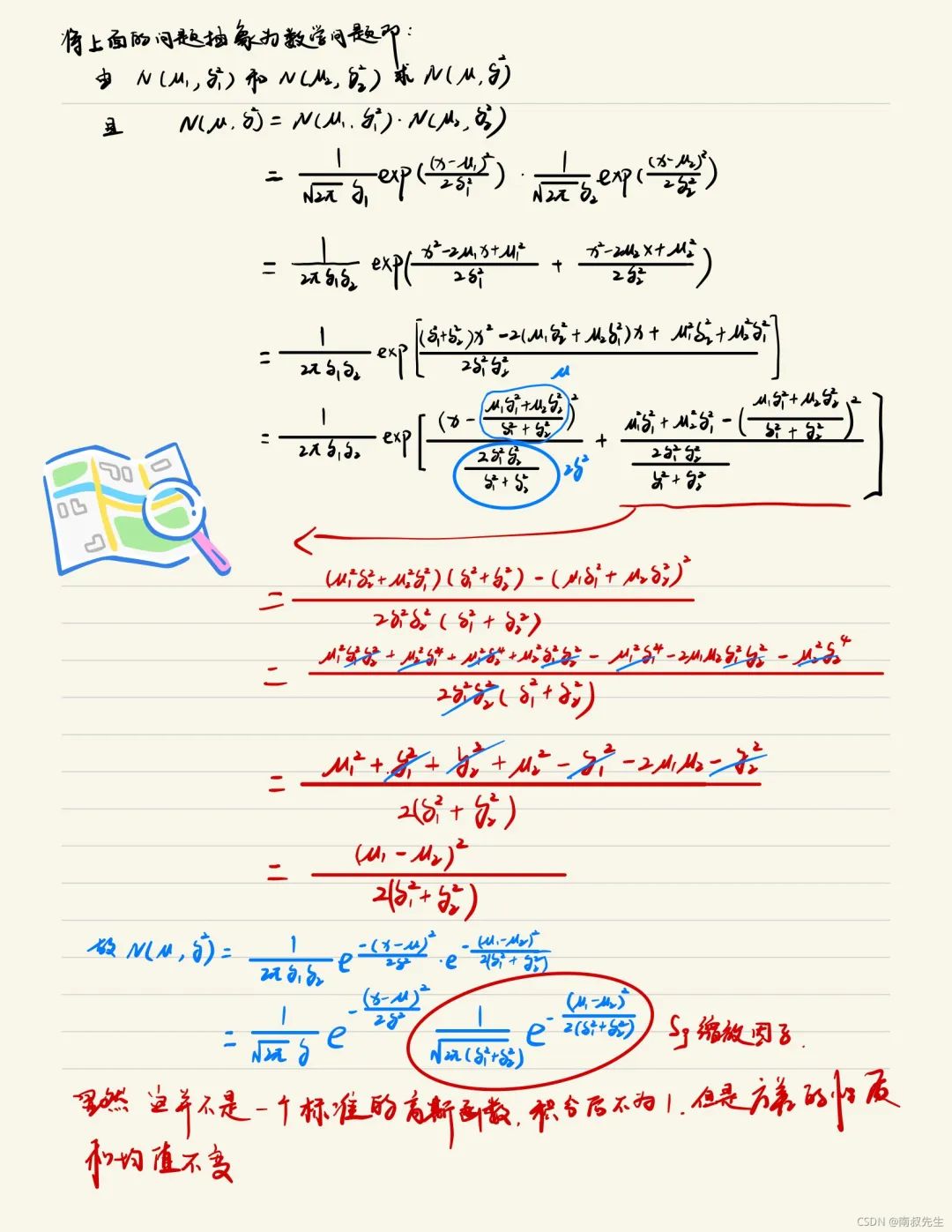
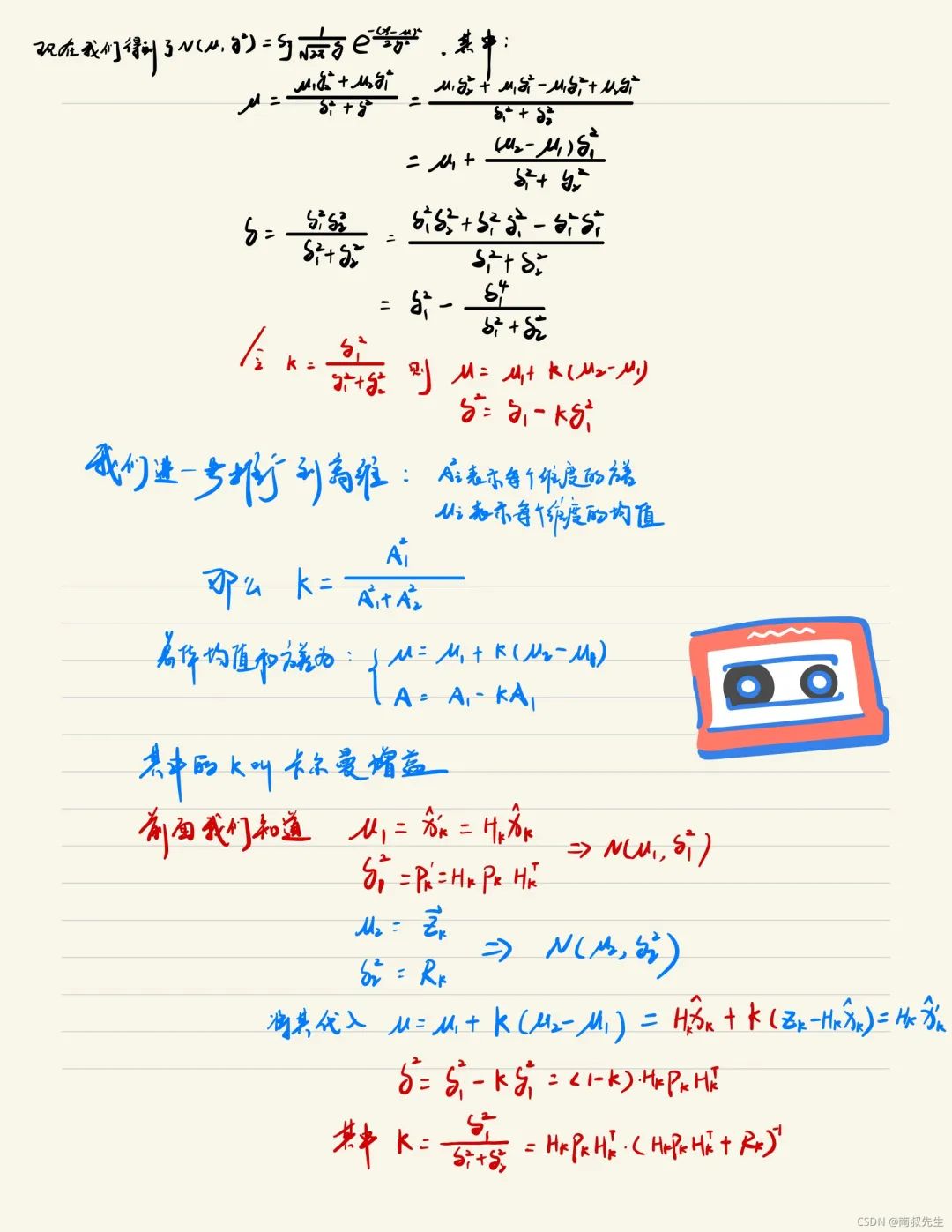
05 详细推导

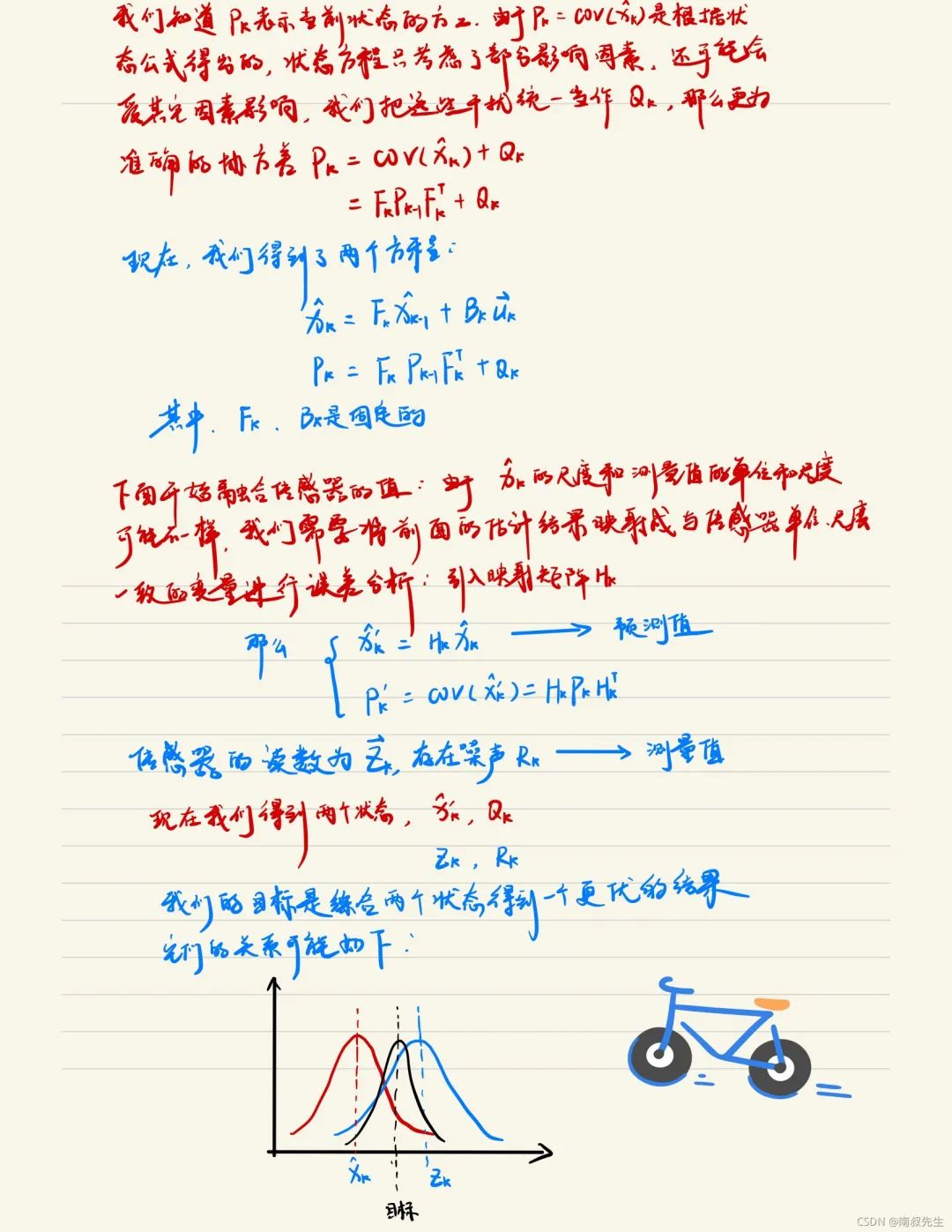
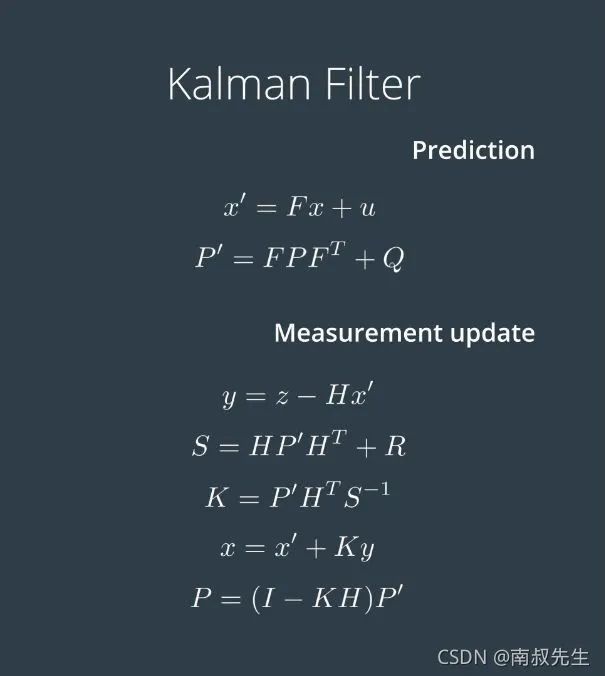
下图更简洁的展示了计算流程:
其中F为控制矩阵,Q为预测不确定性,R为传感器噪声,H为映射矩阵,y为误差,
S为方差之和,K为卡尔曼增益,P为更新后的协方差
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。