Yolov5 + Opencv DNN + C++部署
原创
Yolov5 + Opencv DNN + C++部署
原创
AI小怪兽
修改于 2023-11-30 15:50:54
修改于 2023-11-30 15:50:54
漫谈C++
摘要:深度学习模型如何在C++下进行调用,
本文详细阐述了YOLOv5在C++ & Opencv下进行调用
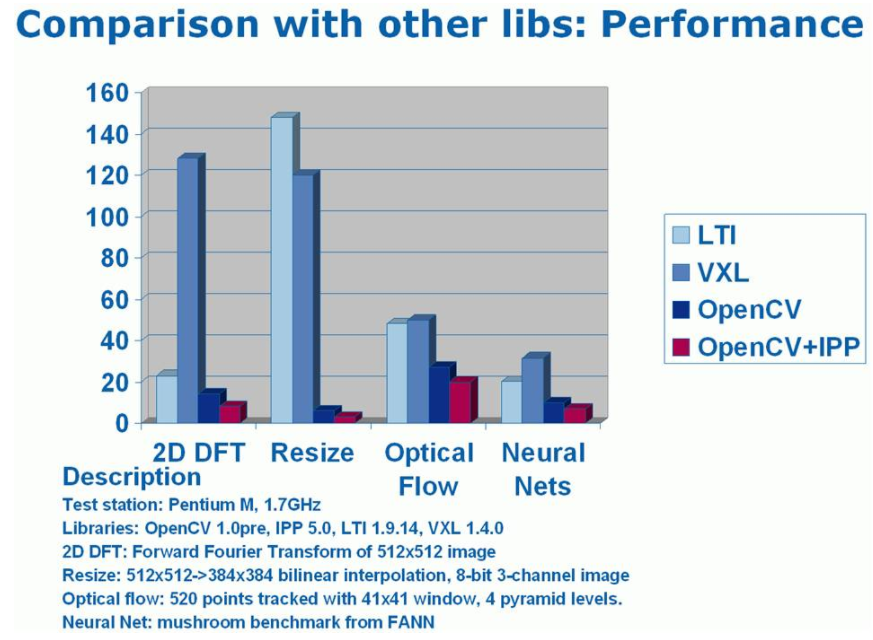
1.Opencv介绍
OpenCV由各种不同组件组成。OpenCV源代码主要由OpenCV core(核心库)、opencv_contrib和opencv_extra等子仓库组成。近些年,OpenCV的主仓库增加了深度学习相关的子仓库:OpenVINO(即DLDT, Deep Learning Deployment Toolkit)、open_model_zoo,以及标注工具CVAT等。
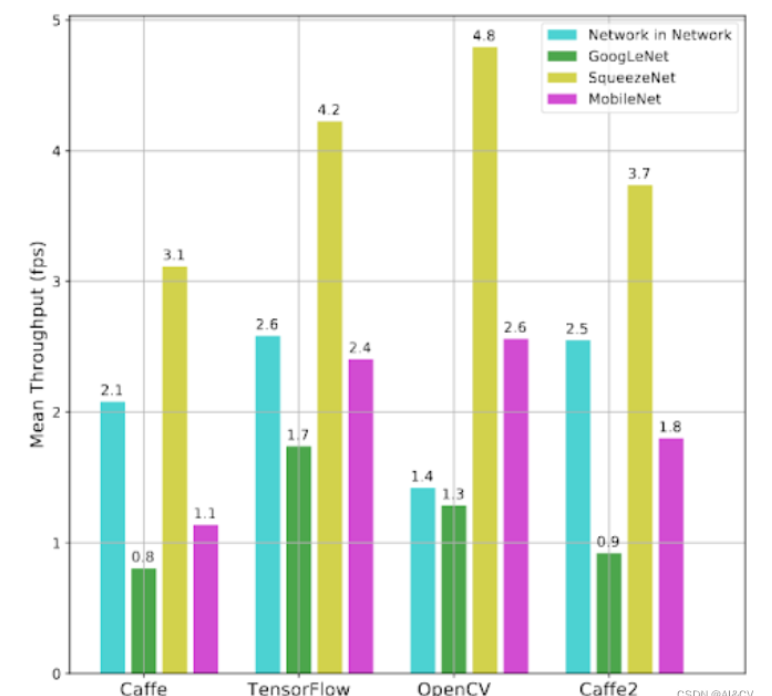
1.2 Opencv DNN介绍
OpenCV深度学习模块只提供网络推理功能,不支持网络训练。像所有的推理框架一样,加载和运行网络模型是基本的功能。深度学习模块支持TensorFlow、Caffe、Torch、DarkNet、ONNX和OpenVINO格式的网络模型,用户无须考虑原格式的差异。在加载过程中,各种格式的模型被转换成统一的内部网络结构。
1.3 .OpenCV DNN模块支持的不同深度学习功能
- 图像分类网络
- Caffe:AlexNet、GoogLeNet、VGG、ResNet、SqueezeNet、DenseNet、ShuffleNet
- TensorFlow:Inception、MobileNet
- Darknet:darknet-imagenet
- ONNX:AlexNet、GoogleNet、CaffeNet、RCNN_ILSVRC13、ZFNet512、VGG16、VGG16_bn、ResNet-18v1、ResNet-50v1、CNN Mnist、MobileNetv2、LResNet100E-IR、Emotion FERPlus、Squeezenet、DenseNet121、Inception-v1/v2、ShuffleNet
- 对象检测网络
- Caffe:SSD、VGG、MobileNet-SSD、Faster-RCNN、R-FCN、OpenCV face detector
- TensorFlow:SSD、Faster-RCNN、Mask-RCNN、EAST
- Darknet:YOLOv2、Tiny YOLO、YOLOv3、YOLOV4、YOLOV5、YOLOV7
- ONNX:TinyYOLOv2
- 语义分割网络:FCN(Caffe)、ENet(Torch)、ResNet101_DUC_HDC(ONNX)
- 姿势估计网络:openpose(Caffe)
- 图像处理网络:Colorization(Caffe)、Fast-Neural-Style(Torch)
- 人脸识别网络:openface(Torch)
2.Opencv DNN YOLOv5导入
源代码如下:
#include <fstream>
#include <opencv2/opencv.hpp>
std::vector<std::string> load_class_list()
{
std::vector<std::string> class_list;
std::ifstream ifs("classes.txt");
std::string line;
while (getline(ifs, line))
{
class_list.push_back(line);
}
return class_list;
}
void load_net(cv::dnn::Net& net, bool is_cuda)
{
auto result = cv::dnn::readNet(yolov5s.onnx");
if (is_cuda)
{
std::cout << "Attempty to use CUDA\n";
result.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
result.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA_FP16);
}
else
{
std::cout << "Running on CPU\n";
result.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
result.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
}
net = result;
}
const std::vector<cv::Scalar> colors = { cv::Scalar(255, 255, 0), cv::Scalar(0, 255, 0), cv::Scalar(0, 255, 255), cv::Scalar(255, 0, 0) };
const float INPUT_WIDTH = 640.0;
const float INPUT_HEIGHT = 640.0;
const float SCORE_THRESHOLD = 0.2;
const float NMS_THRESHOLD = 0.4;
const float CONFIDENCE_THRESHOLD = 0.4;
struct Detection
{
int class_id;
float confidence;
cv::Rect box;
};
cv::Mat format_yolov5(const cv::Mat& source) {
int col = source.cols;
int row = source.rows;
int _max = MAX(col, row);
cv::Mat result = cv::Mat::zeros(_max, _max, CV_8UC3);
source.copyTo(result(cv::Rect(0, 0, col, row)));
return result;
}
void detect(cv::Mat& image, cv::dnn::Net& net, std::vector<Detection>& output, const std::vector<std::string>& className) {
cv::Mat blob;
auto input_image = format_yolov5(image);
cv::dnn::blobFromImage(input_image, blob, 1. / 255., cv::Size(INPUT_WIDTH, INPUT_HEIGHT), cv::Scalar(), true, false);
net.setInput(blob);
std::vector<cv::Mat> outputs;
net.forward(outputs, net.getUnconnectedOutLayersNames());
float x_factor = input_image.cols / INPUT_WIDTH;
float y_factor = input_image.rows / INPUT_HEIGHT;
float* data = (float*)outputs[0].data;
const int dimensions = 85;
const int rows = 25200;
std::vector<int> class_ids;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
for (int i = 0; i < rows; ++i) {
float confidence = data[4];
if (confidence >= CONFIDENCE_THRESHOLD) {
float* classes_scores = data + 5;
cv::Mat scores(1, className.size(), CV_32FC1, classes_scores);
cv::Point class_id;
double max_class_score;
minMaxLoc(scores, 0, &max_class_score, 0, &class_id);
if (max_class_score > SCORE_THRESHOLD) {
confidences.push_back(confidence);
class_ids.push_back(class_id.x);
float x = data[0];
float y = data[1];
float w = data[2];
float h = data[3];
int left = int((x - 0.5 * w) * x_factor);
int top = int((y - 0.5 * h) * y_factor);
int width = int(w * x_factor);
int height = int(h * y_factor);
boxes.push_back(cv::Rect(left, top, width, height));
}
}
data += 85;
}
std::vector<int> nms_result;
cv::dnn::NMSBoxes(boxes, confidences, SCORE_THRESHOLD, NMS_THRESHOLD, nms_result);
for (int i = 0; i < nms_result.size(); i++) {
int idx = nms_result[i];
Detection result;
result.class_id = class_ids[idx];
result.confidence = confidences[idx];
result.box = boxes[idx];
output.push_back(result);
}
}
int main(int argc, char** argv)
{
std::vector<std::string> class_list = load_class_list();
cv::Mat frame;
cv::VideoCapture capture("sample.mp4");
if (!capture.isOpened())
{
std::cerr << "Error opening video file\n";
return -1;
}
bool is_cuda =false;
cv::dnn::Net net;
load_net(net, is_cuda);
auto start = std::chrono::high_resolution_clock::now();
int frame_count = 0;
float fps = -1;
int total_frames = 0;
while (true)
{
capture.read(frame);
if (frame.empty())
{
std::cout << "End of stream\n";
break;
}
std::vector<Detection> output;
detect(frame, net, output, class_list);
frame_count++;
total_frames++;
int detections = output.size();
for (int i = 0; i < detections; ++i)
{
auto detection = output[i];
auto box = detection.box;
auto classId = detection.class_id;
const auto color = colors[classId % colors.size()];
cv::rectangle(frame, box, color, 3);
cv::rectangle(frame, cv::Point(box.x, box.y - 20), cv::Point(box.x + box.width, box.y), color, cv::FILLED);
cv::putText(frame, class_list[classId].c_str(), cv::Point(box.x, box.y - 5), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
if (frame_count >= 30)
{
auto end = std::chrono::high_resolution_clock::now();
fps = frame_count * 1000.0 / std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count();
frame_count = 0;
start = std::chrono::high_resolution_clock::now();
}
if (fps > 0)
{
std::ostringstream fps_label;
fps_label << std::fixed << std::setprecision(2);
fps_label << "FPS: " << fps;
std::string fps_label_str = fps_label.str();
cv::putText(frame, fps_label_str.c_str(), cv::Point(10, 25), cv::FONT_HERSHEY_SIMPLEX, 1, cv::Scalar(0, 0, 255), 2);
}
cv::imshow("output", frame);
if (cv::waitKey(1) != -1)
{
capture.release();
std::cout << "finished by user\n";
break;
}
}
std::cout << "Total frames: " << total_frames << "\n";
return 0;
}2.1 配置opencv环境
包含目录:D:\Program Files\Opencv\opencv-4.5.2\build\include
库目录:D:\Program Files\Opencv\opencv-4.5.2\build\x64\vc15\lib
链接器-输入: opencv_world452.lib
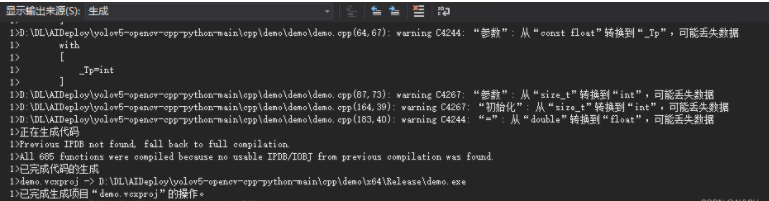
2.2 VS2019编译
2.3 如何得到.ONNX
GitHub - ultralytics/yolov5: YOLOv5 🚀 in PyTorch > ONNX > CoreML > TFLite进行模型转换
python export.py --weights weights\yolov5s.pt --include onnx2.4 Bug解决
[ERROR:0] global C:\build\master_winpack-build-win64-vc15\opencv\modules\dnn\src\onnx\onnx_importer.cpp (2110) cv::dnn::dnn4_v20210301::ONNXImporter::handleNode DNN/ONNX: ERROR during processing node with 1 inputs and 1 outputs: [Identity]:(onnx::Resize_445)
OpenCV: terminate handler is called! The last OpenCV error is:
OpenCV(4.5.2) Error: Unspecified error (> Node [Identity]:(onnx::Resize_445) parse error: OpenCV(4.5.2) C:\build\master_winpack-build-win64-vc15\opencv\modules\dnn\src\dnn.cpp:5298: error: (-215:Assertion failed) inputs.size() in function 'cv::dnn::dnn4_v20210301::Layer::getMemoryShapes'
> ) in cv::dnn::dnn4_v20210301::ONNXImporter::handleNode, file C:\build\master_winpack-build-win64-vc15\opencv\modules\dnn\src\onnx\onnx_importer.cpp, line 2129解决方案:export.py中do_constant_folding=True改为do_constant_folding=False2
torch.onnx.export(
model.cpu() if dynamic else model, # --dynamic only compatible with cpu
im.cpu() if dynamic else im,
f,
verbose=False,
opset_version=opset,
do_constant_folding=False,
input_names=['images'],
output_names=output_names,
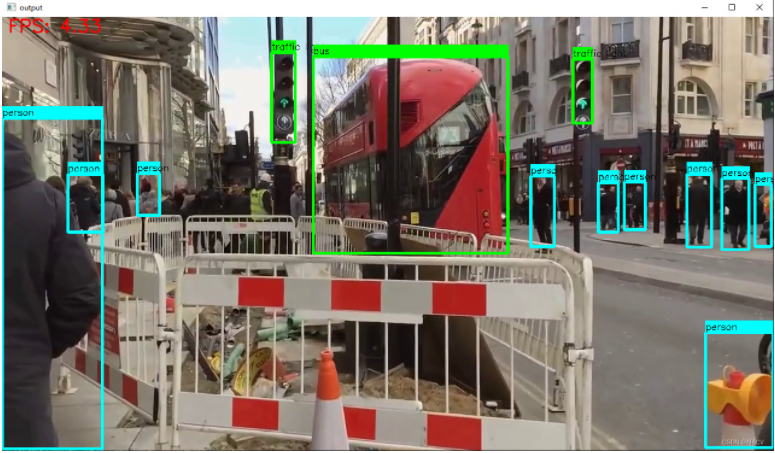
dynamic_axes=dynamic or None)2.5 opencv dnn推理性能
yolov5s 输入:640*640 FPS:3.10
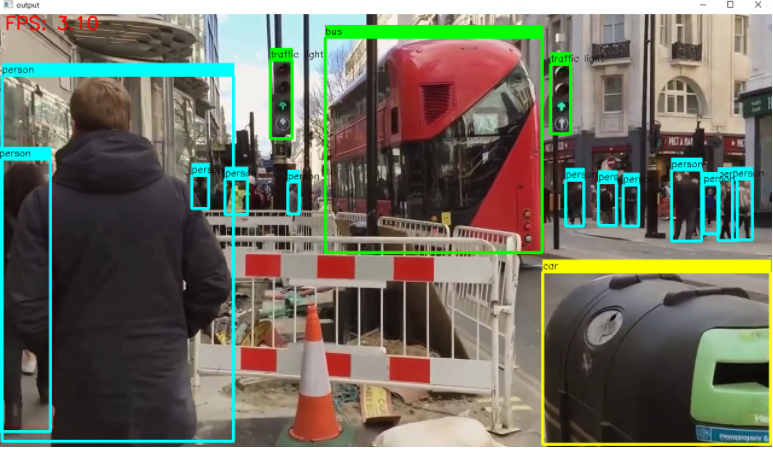
yolov5n 输入:640*640 FPS:4.33
by CSDN AI小怪兽 http://cv2023.blog.csdn.net
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号