
将Arduino罗盘信号转换为可用航向
背景
我从亚马逊买了一个带有QMC5883芯片的Arduino磁力仪/指南针,但是我得到的轴承输出与我在网上找到的计算结果不符。串行输出似乎是合理的(相位差90°的正弦),但我为计算得到的方位所得到的数字不符合他们的预期。我将串行输出存储为一个.csv文件,以便在Excel中通过360°时绘制磁强计的响应:
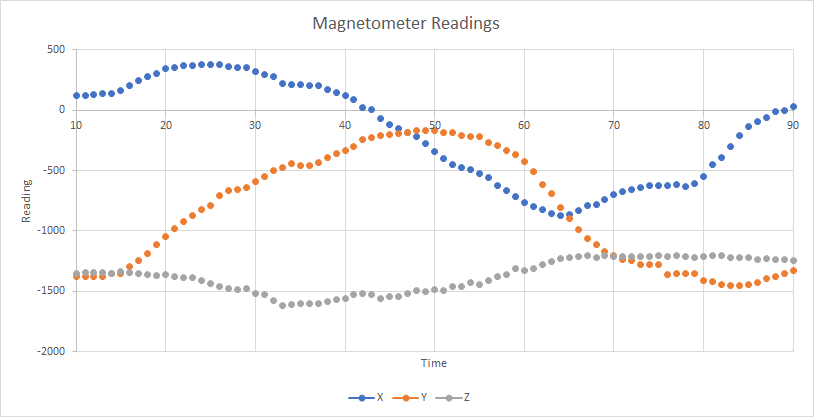
响应与预期大致相同-Z保持大致稳定(除了几个由电缆引起的摆动!),X和Y变化的正弦通过360°。(请记住,我不能用手以恒定的速度转动磁强计,这就是为什么曲线如此不稳定的原因)。
然而,下面是计算标题的图表;结果应该在-180°到+180°之间:
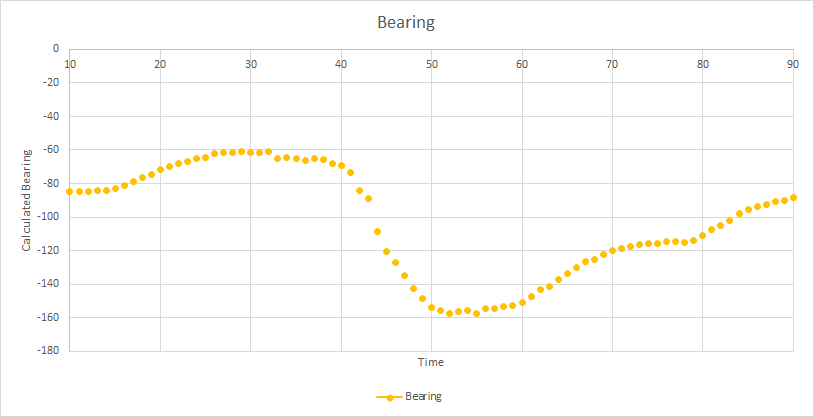
正如你所看到的,它只变化在-60°到-160°之间,而且每个轴承读数并不是唯一的,因为它是由磁强计的两个不同的旋转给出的。所使用的代码中的具体计算(全部在底部)是:
bearing =180*atan2(y,x)/3.141592654; //values will range from +180 to -180°
bearing +=0-(19/60); //Adjust for local magnetic declination问题
我不知道这个计算有什么问题,因为它在几个不同的来源中使用,我想知道如何将我得到的读数转换到一个1比1的可用范围,而不是多到1,比如-180°到+180°或者0°到360°。
以下是代码:
//There are several differences between the QMC5883L and the HMC5883L chips
//Differences in address: 0x0D for QMC5883L; 0x1E for HMC5883L
//Differences in register map (compare datasheets)
//Output data register differences include location of x,y,z and MSB and LSB for these parameters
//Control registers are also different (so location and values for settings change)
#include <Wire.h> //I2C Arduino Library
#define addr 0x0D //I2C Address for The QMC5883L (0x1E for HMC5883)
double scale=1.0;
void setup() {
// double scaleValues[9]={0.00,0.73,0.92,1.22,1.52,2.27,2.56,3.03,4.35};
// scale=scaleValues[2];
//initialize serial and I2C communications
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(addr); //start talking to slave
Wire.write(0x0B);
Wire.write(0x01);
Wire.endTransmission();
Wire.beginTransmission(addr); //start talking to slave
Wire.write(0x09);
Wire.write(0x1D);
Wire.endTransmission();
}
void loop() {
int x, y, z; //triple axis data
//Tell the QMC what regist to begin writing data into
Wire.beginTransmission(addr);
Wire.write(0x00); //start with register 00H for QMC5883L
Wire.endTransmission();
double bearing=0.00;
//Read the data.. 2, 8 bit bytes for each axis.. 6 total bytes
Wire.requestFrom(addr, 6);
//read 6 registers in order; register location (i.e.00H)indexes by one once read
if (6 <= Wire.available()) {
//note the order of following statements matters
//as each register will be read in sequence starting from data register 00H to 05H
//where order is xLSB,xMSB,yLSB,yMSB,zLSB,zMSB
//this is different from HMC5883L!
//data registers are 03 to 08
//where order is xMSB,xLSB,zMSB,zLSB,yMSB,yLSB
x = Wire.read(); //LSB x;
x |= Wire.read()<<8; //MSB x; bitshift left 8, then bitwise OR to make "x"
// x*=scale;
y = Wire.read(); //LSB y
y |= Wire.read()<<8; //MSB y;
// y*=scale;
z = Wire.read(); //LSB z; irrelevant for compass
z |= Wire.read()<<8; //MSB z;
// z*=scale;
bearing =180*atan2(y,x)/3.141592654;//values will range from +180 to -180 degrees
bearing +=0-(19/60);//Adjust for local magnetic declination
}
// Show Values
//Serial.print("X:");
Serial.print(x);
//Serial.print(" Y: ");
Serial.print(",");
Serial.print(y);
//Serial.print(" Z: ");
Serial.print(",");
Serial.print(z);
//Serial.print(" B: ");
Serial.print(",");
Serial.println(bearing);
delay(500);
} 回答 1
Stack Overflow用户
发布于 2020-04-18 18:09:44
对于阅读这一问题的其他人:
OP忘记实现x、y、z平滑和范围外值删除。这是如何实现的,以及它是如何实现的--看看这个QMC5883指南针库的源代码
QMC5883L指南针是一个使用QMC5583L系列芯片卡作为指南针的Arduino库。
它支持:
- 得到XYZ轴的值。
- 计算方位角。
- 得到16点方位方位方向(0 - 15)。
- 获得16点方位方位名称(N,NNE,NE,ENE,E,ESE,SE,SSE,S,SSW,SW,WSW,W,WNW,NW,NW,NNW)
- 通过滚动平均和最小/最大去除平滑XYZ读数。
https://stackoverflow.com/questions/60272297
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号