用于动力学问题分析的单元构造与前面静力问题时相同,不同之处是所有基于节点的基本力学变量也都是时间的函数。下面给出用于动力学问题单元构造的基本表达式。
弹性动力学的基本方程
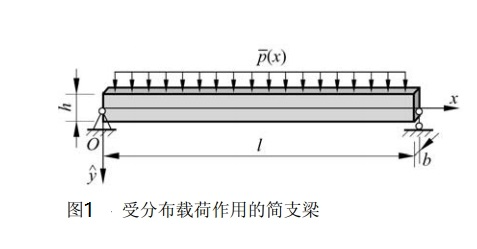
图1为受分布载荷作用的简支梁,该动力问题的三大类基本方程如下。
y方向的平衡方程
-EI\frac {d^4 v(x,t)}{d x^4} + p(x) -\rho A \ddot v(x,t) = 0
x方向的平衡方程
\begin{split}
M(x,t) &= \int_A \sigma_x ydA \\
&= \int_A -y^2 E \frac {d^2 v(x,t)}{d x^2} dA \\
& = -EI\frac {d^2 v(x,t)}{d x^2}
\end{split}
\sigma_x = -Ey\frac {d^2 v(x,t)}{d x^2}
\epsilon_x = -y\frac {d^2 v(x,t)}{d x^2}
将刚架单元在振动过程中受到的分布惯性力作为一种随时间变化的分布荷载看待,即有
\delta Q(x,t) = -\rho A \delta \ddot v(x,t)=-\rho A \mathbf N \delta \mathbf {\ddot q}^e
式中
\delta \ddot v(x,t)为单元轴线上任意点沿坐标轴y方向的虚位移加速度,
\rho为单元材料的密度.
虚功方程
由分布质量的惯性力在虚位移上所作得虚功为
\begin{split}
\delta W^e &= \int_0^l \delta v(x,t) \delta Q(x,t)dx \\
&= -\rho A \mathbf q^{eT}\int_0^l \mathbf N^T \mathbf N dx \delta \mathbf {\ddot q}^e \\
\end{split}
根据由虚功原理
\delta W_e = \delta W_i 可得
\int_V \mathbf B^T E \mathbf B dV \mathbf q^e = -\rho A \mathbf q^{eT}\int_0^l \mathbf N^T \mathbf N dx \delta \mathbf {\ddot q}^e \\
记
\mathbf k^e = \int_V \mathbf B^T E \mathbf B dV
\mathbf m = \rho A \int_0^l \mathbf N^T \mathbf N dx
则有
\mathbf m \mathbf {\ddot q}^e + \mathbf k^e \mathbf q^e = 0
这是单元的自由振动方程,又称为动力特性方程。因为从它可以解出系统的固有频率和固有振型。
\mathbf m为单元的一致质量矩阵, 是因为导出它时,和导出刚度矩阵所根据的原理(虚功法)及所采用位移插值函数是一致的。此外,在有限元法中还经常采用所谓集中(或团聚)质量矩阵,它规定单元的质量集中在节点上,这样得到的质量矩阵是对角线矩阵。
经积分运算可得
\mathbf m = \frac {\rho A l}{420}
\begin{bmatrix}
156 & 22l & 54 & -13l \\
22l & 4l^2 & 13l & -3l^2\\
54 & 13l & 156 & -22l \\
-13l & -3l^2 & -22l & 4l^2
\end{bmatrix}
可见单元一致质量矩阵是对称矩阵,它的某一列元素代表了某结点位移加速度等于1时所引起的各单元杆端力。