向量在不同坐标系之间的转换关系有统一的公式。设局部坐标系
O^{'}x^{'}y^{'}z^{'}的三个轴
x^{'},y^{'},z^{'}在整体坐标系
Oxyz中的方向余弦分别是
(l_x,m_x,n_x),
(l_y,m_y,n_y)和
(l_z,m_z,n_z)。那么一个在局部坐标系中定义的向量与它相应的整体坐标系下的向量的转换矩阵为
\mathbf T_2 =\begin{bmatrix}
l_x& l_y& l_z \\
m_x& m_y& m_z \\
n_x& n_y& n_z\\
\end{bmatrix} \quad (1)
由于空间梁单元的每个结点都有6个位移,可组成两个三维的向量,因此它的结点位移共有4个三维的向量,转换矩阵相应地为
\mathbf T =\begin{bmatrix}
\mathbf T_2 & 0& 0& 0 \\
0& \mathbf T_2 & 0& 0 \\
0& 0& \mathbf T_2 & 0\\
0& 0& 0& \mathbf T_2 \\
\end{bmatrix} \quad (2)
一般说来,对于梁单元的轴线方向
x^{'}轴,它的方向余弦是能够通过两个结点的坐标直接求得的,但是对于截面主轴
y^{'} 和
z^{'}的方向余弦,必须给出附加信息才能确定。现在来推导梁单元转换矩阵
T的转换公式。
x^{'}轴在
Oxyz坐标系中的方向余弦
设
(x_i,y_i,z_i)和
(x_j,y_j,z_j)为节点
i和
j在整体坐标系
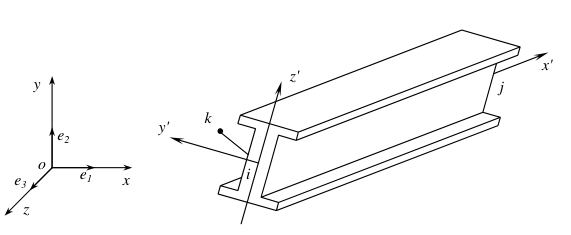
Oxyz中的坐标。如图1所示
x^{'}轴的三个方向余弦跟空间杆单元的一样
\begin{split}
l_x &= \frac{x_j-x_i}{l}\\
m_x &= \frac{y_j-y_i}{l}\\
n_x &= \frac{z_j-z_i}{l}\\
l &= \sqrt{(x_j-x_i)^2 + (y_j-y_i)^2+(z_j-z_i)^2}
\end{split} \quad (3)
若以
\mathbf e_1,\mathbf e_2和
\mathbf e_3表示整体坐标系下沿三个坐标轴方向的单位矢量,则
x^{'}轴的单位矢量
\mathbf e_1^{'}可以写成
\mathbf e_1^{'} = l_x \mathbf e_1 + m_x \mathbf e_2+ n_x \mathbf e_3 \quad (4)
z^{'}轴在
Oxyz坐标系中的方向余弦
在梁单元的主形心惯性平面(
x^{'}y^{'}平面)上取一点
K ,该点在整体坐标系中的坐标为
(x_k,y_k,z_k),若用
\bf g表示
ik方向的单位矢量,则有
\mathbf {g} = g_1 \mathbf e_1 + g_2 \mathbf e_2+ g_3 \mathbf e_3 \quad (5)
其中
\begin{split}
g_1 &= \frac{x_k-x_i}{l_k}\\
g_2 &= \frac{y_k-y_i}{l_k}\\
g_3 &= \frac{z_k-z_i}{l_k}\\
l_k &= \sqrt{(x_k-x_i)^2 + (y_k-y_i)^2+(z_k-z_i)^2}
\end{split} \quad (6)
根据矢量的外积法则,
z^{'}轴的单位矢量
\mathbf e_3^{'}可以写成
\mathbf e_3^{'} = \frac{\mathbf e_1^{'} \times \mathbf g }{|\mathbf e_1^{'} \times \mathbf g|} = l_z \mathbf e_1 + m_z \mathbf e_2+ n_z \mathbf e_3 \quad (7)
其中
\begin{split}
l_z &= \frac{m_xg_3-n_xg_2}{s}\\
m_z &= \frac{n_xg_1-l_xg_3}{s}\\
n_z &= \frac{l_xg_2-m_xg_1}{s}\\
s &= \sqrt{(m_xg_3-n_xg_2)^2 + (n_xg_1-l_xg_3)^2+(l_xg_2-m_xg_1)^2}
\end{split} \quad (8)
y^{'}轴在
Oxyz坐标系中的方向余弦
按照矢量乘法,
y^{'}轴在
Oxyz坐标系中的方向余弦是
\mathbf e_2^{'} = \mathbf e_3^{'}\times
\mathbf e_1^{'}=l_y \mathbf e_1 + m_y \mathbf e_2+ n_y \mathbf e_3 \quad (9)
其中
\begin{split}
l_y & = m_zn_x - n_zm_x \\
m_y & = n_zl_x - l_zn_x \\
n_y & = l_zm_x - l_xm_z \\
\end{split} \quad (10)
综上,得到局部坐标系和整体坐标系之间位移的转换矩阵为
\mathbf T_2 =\begin{bmatrix}
l_x& \frac{g_1-l_x(l_xg_1+m_xg_2+n_xg_3)}{s}& \frac{m_xg_3-n_xg_2}{s} \\
m_x& \frac{g_2-m_x(l_xg_1+m_xg_2+n_xg_3)}{s}& \frac{n_xg_1-l_xg_3}{s} \\
n_x& \frac{g_3-n_x(l_xg_1+m_xg_2+n_xg_3)}{s}& \frac{l_xg_2-m_xg_1}{s} \\
\end{bmatrix} \quad (11)
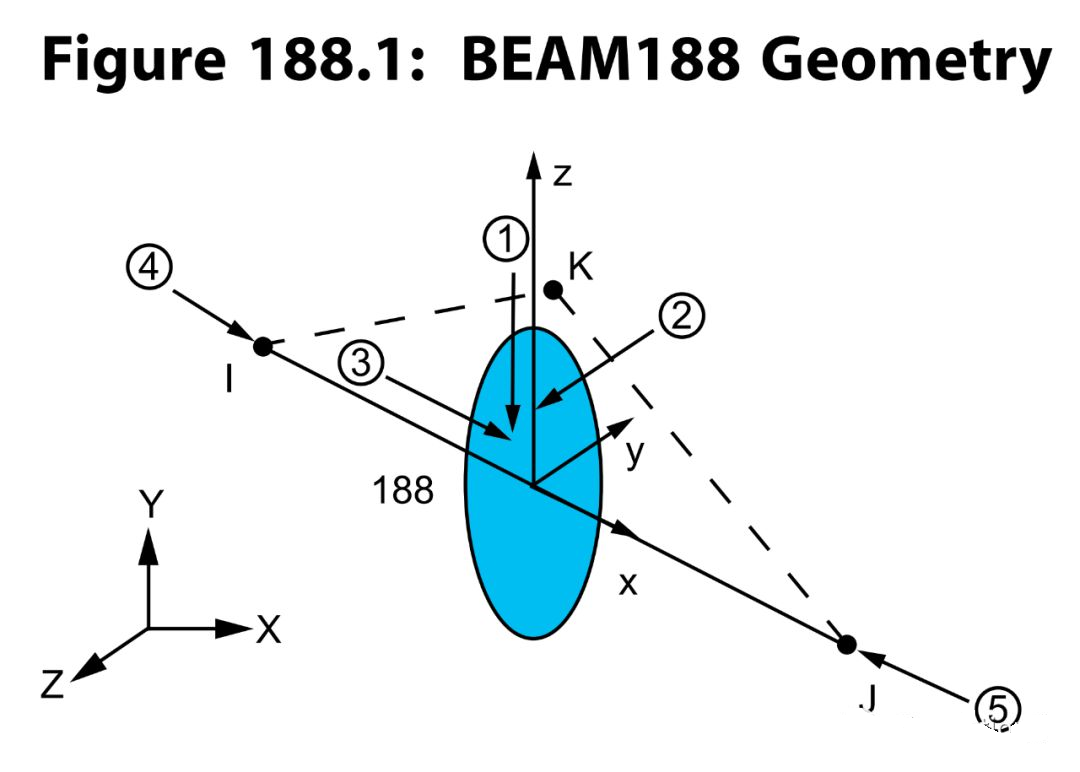
因此,在计算空间梁单元的转换矩阵时,必须提供附加点
K的坐标,来确定梁单元的主平面。这是与平面梁单元和杆单元的不同之处。
K点坐标只需与
i,j节点
z坐标不同即可。图2所示为ANSYS软件中beam188单元的K点。