有限元| 梁单元自由度释放

在ANSYS中模拟梁单元的铰接有两种方法,分别是自由度耦合命令cp与自由度释放命令endrelease,关于这两个命令的使用,可以査阅《ANSYS工程结构数值分析》P350~P353。BEAM3单元采用cp命令,其理论可参考有限元 | 多点约束
BEAM44单元采用KEYOPT(7)释放自由度,其方法是释放“刚度矩阵”,其操作是在建立单元的过程中完成的。下面探讨其理论依据。
梁单元刚度方程
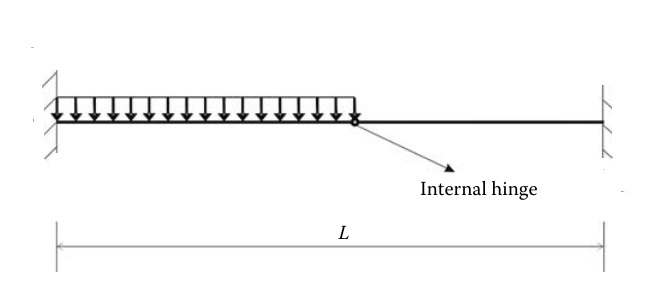
▲图1
在某些情况下,梁可能包含内部铰链,这会导致挠度曲线斜率的不连续性以及弯矩为零。如果我们要使用有限元方法来分析图1中所示的梁,我们将使用两个单元来离散之。铰链应只考虑一次,或者与单元1相关联,或者与单元2相关联。如果梁由两个单元离散化,一个单元右端有铰链,另一个单元左端有铰链,结果将是奇异刚度矩阵。如果单元节点2有铰,则刚度方程(1)的分块矩阵形式
由(2)得
解得
记
则
其中
按照(1)的形式,节点2为铰接的梁刚度方程为
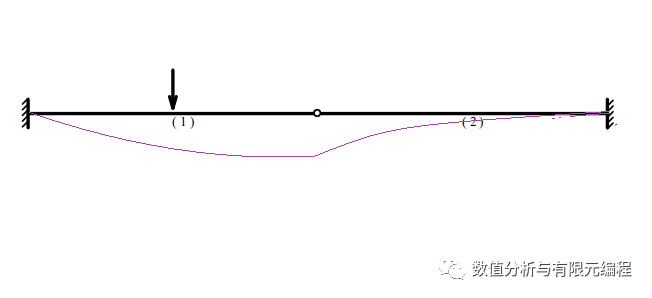
▲图2
[例1] 如图2所示的结构,若划分2个单元,中间的铰接点只能考虑一次,即单元1的右节点释放自由度。单元1的刚度矩阵
单元1的等效节点荷载
单元2的刚度矩阵
本文思路和动力学中缩减自由度一样
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-05-13,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读