大模型应用:近似最近邻搜索(ANN)算法驱动向量数据库的高效检索.29
原创
大模型应用:近似最近邻搜索(ANN)算法驱动向量数据库的高效检索.29
原创
未闻花名
发布于 2026-02-26 08:03:27
发布于 2026-02-26 08:03:27
一、引言
在大模型与RAG技术深度融合应用提效增能的场景下,向量数据库成为了连接文本语义化与实时智能检索的关键枢纽。当海量的文本、图像、音频数据被转化为高维向量后,如何在毫秒级时间内从亿级向量库中找到与查询向量最相似的结果,成为了决定上层应用体验的核心瓶颈。
传统的精确最近邻搜索(Brute-force)看似精准,却需要遍历所有向量计算相似度,在数据量达到百万级以上时,耗时会飙升至秒级甚至分钟级,完全无法满足实时应用需求。而近似最近邻搜索(ANN) 算法的出现,打破了这一瓶颈,它以牺牲少量精度为代价,换取指数级的检索速度提升,成为了向量数据库的性能核心。今天我们就深度探索一下传统的精确最近邻搜索和ANN的技术原理,关键特性,以及它与大模型应用的深度绑定关系,深度的理解向量数据库高效检索的底层逻辑。

二、精确最近邻搜索(Brute-force)
1. 基础概念
精确最近邻搜索,Brute-force,也叫暴力搜索,是在高维向量空间中,通过遍历所有向量并逐一计算与查询向量的相似度,即距离,最终筛选出距离最近的 Top-K 向量的检索方法。其核心特点是:无近似、无索引、全量计算,能 100% 返回真实的最近邻结果,是所有近似最近邻(ANN)算法的精度基准。
2. 核心逻辑
对于包含 n 个 d 维向量的数据集 V = {v₁, v₂, ..., vₙ} 和查询向量 q,BF 的执行逻辑为:
- 1. 遍历数据集每个向量 vᵢ ∈ V;
- 2. 计算 q 与 vᵢ的距离(常用余弦距离、欧氏距离);
- 3. 将所有距离排序,取最小的 Top-K 个距离对应的向量,即为精确最近邻结果。
3. 关键特性
- 精度:100% 精确,无漏检、无错检
- 时间复杂度:O (n×d)(n = 向量数量,d = 向量维度),与向量数量/维度线性相关
- 空间复杂度:O (n×d),仅需存储原始向量,无需额外索引空间
- 适用场景:小数据量(万级以下)、精度要求 100% 的场景(如算法对比、小规模实验)
- 缺点:数据量/维度提升时,计算耗时呈线性爆炸,无法满足实时检索需求
4. 常用距离计算方式
精确最近邻搜索的核心是“距离计算”,两种最常用的距离公式:
4.1 欧氏距离(Euclidean Distance)
- 定义:衡量向量在空间中的直线距离
- 公式:d_euclidean(q, v_i) = √[ Σ(q_k - v_ik)² ]
- 其中:
- k = 1 到 d,d 是向量维度
- q_k 和 v_ik 分别表示查询向量 q 和第 i 个向量 v_i 在第 k 维的值
- Σ 表示对所有维度求和
- 直观理解:计算两个向量各维度差值的平方和,然后取平方根
4.2 余弦距离(Cosine Distance)
- 定义:衡量向量方向的相似度(更适用于嵌入向量)
- 公式:d_cosine(q, v_i) = 1 - [ (q·v_i) / (||q|| × ||v_i||) ]
- 其中:
- q·v_i 表示两个向量的点积(内积)
- ||q|| 和 ||v_i|| 分别表示两个向量的模长(范数)
- 分母是两向量模长的乘积
- 1 减去余弦相似度得到余弦距离
- 直观理解:
- 分子 (q·v_i):衡量两个向量的方向一致性
- 分母 (||q|| × ||v_i||):消除向量长度的影响
- 结果:值越小表示两个向量方向越接近
5. 示例推导
5.1 数据集定义
为便于理解和可视化,选择 2 维向量场景:
- 数据集 V(10 个 2 维随机向量): V = {(1.2, 3.1), (2.5, 4.2), (4.3, 1.8), (5.6, 3.9), (7.2, 2.5), (3.8, 5.4), (6.1, 4.8), (2.9, 1.5), (8.0, 3.2), (0.9, 4.5)}
- 查询向量 q:(5.0, 3.5)
- 检索目标:找到与 q 欧氏距离最近的 Top-3 向量(精确结果)
5.2 BF检索分步执行
第一步:遍历所有向量,计算欧氏距离
- 第1个向量坐标 (1.2, 3.1),于q的欧式距离:√[(5-1.2)² + (3.5-3.1)²] ≈ 3.82
- 第2个向量坐标 (2.5, 4.2),于q的欧式距离:√[(5-2.5)² + (3.5-4.2)²] ≈ 2.60
- 第3个向量坐标 (4.3, 1.8),于q的欧式距离:√[(5-4.3)² + (3.5-1.8)²] ≈ 1.84
- 第4个向量坐标 (5.6, 3.9),于q的欧式距离:√[(5-5.6)² + (3.5-3.9)²] ≈ 0.72
- 第5个向量坐标 (7.2, 2.5),于q的欧式距离:√[(5-7.2)² + (3.5-2.5)²] ≈ 2.42
- 第6个向量坐标 (3.8, 5.4),于q的欧式距离:√[(5-3.8)² + (3.5-5.4)²] ≈ 2.25
- 第7个向量坐标 (6.1, 4.8),于q的欧式距离:√[(5-6.1)² + (3.5-4.8)²] ≈ 1.70
- 第8个向量坐标 (2.9, 1.5),于q的欧式距离:√[(5-2.9)² + (3.5-1.5)²] ≈ 2.90
- 第9个向量坐标 (8.0, 3.2),于q的欧式距离:√[(5-8.0)² + (3.5-3.2)²] ≈ 3.02
- 第10个向量坐标 (0.9, 4.5),于q的欧式距离:√[(5-0.9)² + (3.5-4.5)²] ≈ 4.22
第二步:按距离升序排序
- 第4个坐标 (5.6, 3.9),距离值为 0.72
- 第7个坐标 (6.1, 4.8),距离值为 1.70
- 第3个坐标 (4.3, 1.8),距离值为 1.84
- 第6个坐标 (3.8, 5.4),距离值为 2.25
- 第5个坐标 (7.2, 2.5),距离值为 2.42
- 第2个坐标 (2.5, 4.2),距离值为 2.60
- 第8个坐标 (2.9, 1.5),距离值为 2.90
- 第9个坐标 (8.0, 3.2),距离值为 3.02
- 第1个坐标 (1.2, 3.1),距离值为 3.82
- 第10个坐标 (0.9, 4.5),距离值为 4.22
第三步:筛选 Top-3 精确最近邻
- 最终结果:(5.6, 3.9)(距离 0.72)、(6.1, 4.8)(距离 1.70)、(4.3, 1.8)(距离 1.84)
6. 代码示例
6.1 完整代码
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
# 解决中文显示
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# ===================== 1. 数据准备 =====================
np.random.seed(42) # 固定随机种子,保证结果可复现
# 10个2维随机向量(数据集V)
V = np.array([
[1.2, 3.1], [2.5, 4.2], [4.3, 1.8], [5.6, 3.9], [7.2, 2.5],
[3.8, 5.4], [6.1, 4.8], [2.9, 1.5], [8.0, 3.2], [0.9, 4.5]
])
query = np.array([5.0, 3.5]) # 查询向量q
k = 3 # 检索Top-3
# ===================== 2. BF核心计算 =====================
# 计算每个向量与查询向量的欧氏距离
distances = np.linalg.norm(V - query, axis=1)
# 按距离排序,获取Top-K索引
sorted_indices = np.argsort(distances)
top_k_indices = sorted_indices[:k]
top_k_distances = distances[top_k_indices]
top_k_vectors = V[top_k_indices]
# ===================== 3. 动图可视化 =====================
fig, ax = plt.subplots(figsize=(10, 8), tight_layout=True)
ax.set_xlim(0, 9)
ax.set_ylim(1, 6)
ax.set_xlabel('维度1', fontsize=12)
ax.set_ylabel('维度2', fontsize=12)
ax.set_title('精确最近邻搜索(Brute-force)执行过程', fontsize=14)
ax.grid(True, alpha=0.3)
# 初始化绘图元素
# 1. 所有数据集向量(浅灰色)
all_points = ax.scatter(V[:, 0], V[:, 1], c='lightgray', s=60, label='数据集向量')
# 2. 查询向量(红色星号)
query_point = ax.scatter(query[0], query[1], c='red', s=200, marker='*', label='查询向量')
# 3. 遍历中的向量(橙色,动态高亮)
current_point = ax.scatter([], [], c='orange', s=80, edgecolors='black', label='正在计算的向量')
# 4. 距离标注(动态更新)
distance_text = ax.text(0.05, 0.95, '', transform=ax.transAxes, fontsize=10, verticalalignment='top')
# 5. Top-K结果(绿色,逐步显示)
top_k_points = ax.scatter([], [], c='green', s=100, edgecolors='darkgreen', label=f'Top-{k}精确结果')
# 6. 图例
ax.legend(loc='upper right', fontsize=10)
# 初始化动画状态
frames_total = len(V) + k # 遍历所有向量(10帧) + 显示Top-K(3帧)
current_frame = 0
calculated_indices = [] # 已计算的向量索引
top_k_displayed = 0 # 已显示的Top-K数量
def update(frame):
global current_frame, calculated_indices, top_k_displayed
# 阶段1:遍历所有向量,逐点计算距离(前10帧)
if frame < len(V):
# 高亮当前计算的向量
current_point.set_offsets(V[frame].reshape(1, -1))
# 记录已计算的索引
calculated_indices.append(frame)
# 标注当前距离
dist = distances[frame]
distance_text.set_text(f'正在计算向量{frame+1}:\n距离 = {dist:.4f}\n已计算{len(calculated_indices)}/{len(V)}个向量')
# 已计算的向量变浅蓝
all_points.set_offsets(V)
all_points.set_color(['lightblue' if i in calculated_indices else 'lightgray' for i in range(len(V))])
# 阶段2:显示Top-K结果(后3帧)
elif frame < len(V) + k:
current_point.set_offsets(np.empty((0, 2))) # 隐藏当前计算的向量
distance_text.set_text(f'遍历完成!开始显示Top-{k}精确结果\n已显示{top_k_displayed+1}/{k}个')
# 逐点显示Top-K结果
top_k_x = top_k_vectors[:top_k_displayed+1, 0]
top_k_y = top_k_vectors[:top_k_displayed+1, 1]
top_k_points.set_offsets(np.c_[top_k_x, top_k_y])
top_k_displayed += 1
# 阶段3:完成
else:
distance_text.set_text(f'BF检索完成!\nTop-{k}最近邻:\n1. {top_k_vectors[0]}(距离{top_k_distances[0]:.4f})\n2. {top_k_vectors[1]}(距离{top_k_distances[1]:.4f})\n3. {top_k_vectors[2]}(距离{top_k_distances[2]:.4f})')
return all_points, query_point, current_point, distance_text, top_k_points
# 生成动画(保存为GIF)
ani = FuncAnimation(
fig, update, frames=frames_total, interval=600, blit=True, repeat=False
)
ani.save('brute_force_retrieval.gif', writer='pillow', fps=1.5)
plt.show()
# ===================== 4. 输出结果 =====================
print("===== Brute-force 精确检索结果 =====")
print(f"查询向量:{query}")
print(f"Top-{k}最近邻:")
for i, (vec, dist) in enumerate(zip(top_k_vectors, top_k_distances)):
print(f"第{i+1}名:向量{vec},欧氏距离={dist:.4f}")6.2 代码分析
核心逻辑:
- 用 np.linalg.norm 计算欧氏距离(axis=1 表示按行计算);
- 用 np.argsort 对距离排序,获取 Top-K 索引;
直观输出展示:
- 分两个阶段:第一阶段(前 10 帧)逐帧高亮遍历的向量,显示实时计算的距离;第二阶段(后 3 帧)逐帧显示 Top-3 精确结果;
- 颜色区分:数据集向量(浅灰→浅蓝)、查询向量(红星)、遍历中向量(橙色)、最终结果(绿色);
- 文本标注:实时显示计算进度、当前距离、最终结果。
6.3 输出结果
===== Brute-force 精确检索结果 ===== 查询向量:[5. 3.5] Top-3最近邻: 第1名:向量[5.6 3.9],欧氏距离=0.7211 第2名:向量[6.1 4.8],欧氏距离=1.7029 第3名:向量[4.3 1.8],欧氏距离=1.8385
结果图示:
图示说明:
- 第 1-10 帧(遍历计算)
- 1. 浅灰色数据集向量逐个变为浅蓝色;
- 2. 橙色点逐帧移动到当前计算的向量;
- 3. 左上角文本显示 “正在计算向量 X:距离 = XXX 已计算 X/10 个” 模拟 BF“全量遍历、逐一计算” 的核心过程
- 第 11-13 帧(显示结果)
- 1. 橙色点消失;
- 2. 绿色点逐帧显示 Top-3 向量;
- 3. 左上角文本显示 “已显示 X/3 个 Top-K 结果” 展示排序后的精确结果
- 第 14 帧(完成)
- 1. 所有数据集向量为浅蓝,绿色点显示全部 Top-3;
- 2. 左上角文本列出 Top-3 向量的坐标和距离 输出最终精确结果
- 过程总结:
- 直观体现 BF “无遗漏遍历” 的特点:10 个向量全部被逐个计算,无跳过、无近似;
- 结果的 “精确性”:绿色点对应的向量是距离查询点(红星)最近的 3 个,与手动计算结果完全一致;
- 时间成本感知:遍历 10 个 2 维向量已需 10 帧(约 6 秒),可直观理解 “数据量增大后耗时爆炸” 的问题。
三、近似最近邻搜索(ANN)
1. 核心概念
近似最近邻搜索,是在高维向量空间中,以近似的方式快速找到与查询向量最相似的 Top-K 个向量的算法集合。其核心目标是:
- 速度优先:在海量向量场景下,将检索时间从 O (n)(暴力搜索的线性复杂度)降低到 O (log n) 甚至更低;
- 精度可控:通过算法调优,让 “近似结果” 无限接近 “精确结果”,满足绝大多数业务场景的需求。
2. 理解维度灾难
在理解 ANN 之前,必须先认清高维向量检索的核心痛点:维度灾难。 当向量维度较低时(比如 2 维、3 维),我们可以通过空间划分快速定位目标向量;但当向量维度提升到数百维甚至数千维时(比如大模型的 Embedding 向量通常是 768 维、1024 维),会出现两个致命问题:
- 空间稀疏性:高维空间中,向量之间的距离会趋于一致,传统的空间划分方法(如 KD-Tree)完全失效;
- 计算复杂度爆炸:暴力搜索的时间复杂度与向量数量、维度成正比,十亿级向量的检索会成为不可能完成的任务。
而 ANN 算法通过“降维”、“索引构建”等策略,巧妙规避了维度灾难,实现了高维向量的高效检索。
3. ANN算法分类
根据索引构建方式的不同,主流 ANN 算法可以分为三大类,每类算法都有其独特的技术逻辑和适用场景。
3.1 基于树结构的 ANN 算法
核心原理:基于空间划分的朴素思路,通过构建分层树状索引,将高维向量空间划分为多个子空间,检索时只需遍历目标子空间内的向量,而非全量向量。
典型代表:KD-Tree、Ball-Tree
3.1.1 KD-Tree
- 构建逻辑:每次选择一个维度,将向量空间划分为左右两个子空间,递归划分直到每个子空间中的向量数量小于阈值;
- 检索逻辑:从根节点出发,根据查询向量的维度值,向下遍历到叶子节点,再回溯检查相邻子空间的向量,找到近似最近邻。
3.1.2 Ball-Tree
- 构建逻辑:以向量为球心,构建嵌套的超球体,每个球体包含一定数量的向量;
- 检索逻辑:从根球体出发,计算查询向量与球心的距离,优先遍历距离更近的子球体,缩小搜索范围。
核心特性:
- 优点:算法逻辑直观,实现简单,在低维向量(维度 < 20)场景下性能优异;
- 缺点:受维度灾难影响严重,当向量维度超过 50 时,检索效率会急剧下降;
- 适用场景:低维向量检索(如传统机器学习的特征向量),不适合大模型的高维 Embedding 向量。
核心目的:
无论是 KD-Tree 的 “沿轴划分” 还是 Ball-Tree 的 “球形划分”,空间划分的最终目的都是:
- 缩小检索范围:将全量向量空间拆分为多个局部子空间,检索时只需遍历目标子空间及相邻子空间的向量,无需全量遍历。
- 降低时间复杂度:将暴力搜索的 O(n∗d) 复杂度降低到 O(logn∗d)(n 为向量数量,d 为向量维度)。
- 支撑近似检索:为后续的树遍历、候选向量筛选提供结构化索引,是 ANN 算法实现近似换速度的基础。
3.2 基于哈希的 ANN 算法
核心原理:向量的指纹映射,通过设计局部敏感哈希函数(LSH),将高维向量映射到低维哈希空间。其核心特性是:空间中相似的向量,被映射到相同哈希桶的概率更高。
典型代表:LSH、Multi-Probe LSH
3.2.1 LSH 的核心步骤
- 步骤 1:选择合适的局部敏感哈希函数(如余弦距离哈希、欧氏距离哈希);
- 步骤 2:用多个哈希函数对所有向量进行哈希,将向量分配到不同的哈希桶中;
- 步骤 3:检索时,对查询向量进行相同哈希,只在对应的哈希桶中遍历向量,找到近似最近邻。
核心特性:
- 优点:高维向量场景下性能稳定,支持分布式扩展,对内存要求较低;
- 缺点:检索精度受哈希函数数量和哈希桶大小影响大,容易出现漏检;
- 适用场景:对检索速度要求极高、精度要求适中的场景(如大规模图像检索的初筛阶段)。
3.3 基于图结构的 ANN 算法
核心原理:构建一个相似度图(Similarity Graph),其中每个节点代表一个向量,节点之间的边代表向量的相似度,相似度越高,边的权重越大。检索时,从一个起始节点出发,通过图的遍历(如贪心搜索),逐步找到与查询向量最相似的节点。
典型代表:HNSW、NSW、Annoy
3.3.1 HNSW:分层导航小世界图(当前最主流)
- 构建逻辑:
- 构建多层图结构,底层图包含所有向量,上层图是下层图的稀疏采样;
- 每个向量在每层图中都与少量相似向量建立边连接;
- 检索逻辑:
- 从顶层图的随机节点出发,通过贪心搜索找到距离查询向量最近的节点;
- 以该节点为起点,进入下一层图继续搜索;
- 重复步骤直到底层图,最终得到 Top-K 近似最近邻。
核心特性:
- 优点:兼顾高检索速度和高召回率,在高维向量场景下性能远超树结构和哈希算法,支持动态插入/删除向量;
- 缺点:索引构建时间较长,内存占用相对较高;
- 适用场景:大模型 RAG、语义检索等对速度和精度都有高要求的核心场景,是 Milvus、Pinecone、Weaviate 等主流向量数据库的默认检索算法。
4. ANN算法特性
一款优秀的 ANN 算法,需要在以下核心特性上达到平衡,这些特性直接决定了向量数据库的实际应用效果。
4.1 检索速度(Latency)
- 定义:从发起查询到返回 Top-K 结果的耗时,通常以毫秒(ms)为单位;
- 影响因素:算法时间复杂度、索引结构、硬件配置(CPU/GPU)、向量维度;
- 核心要求:在亿级向量场景下,检索耗时需控制在 100ms 以内,才能满足实时应用需求。
4.2 召回率(Recall)
- 定义:ANN 算法返回的近似结果中,包含 “精确最近邻” 的比例,计算公式为:
Recall = ANN返回的精确结果数量 / 暴力搜索返回的精确结果数量
- 影响因素:算法类型、索引参数(如 HNSW 的ef参数、M参数);
- 核心要求:在大多数业务场景下,召回率需达到 95% 以上,才能保证应用效果。
4.3 内存占用
- 定义:构建 ANN 索引所需的内存空间;
- 影响因素:索引结构、向量数量和维度;
- 核心要求:支持“内存 + 磁盘”混合存储,避免因内存不足导致的检索性能下降。
4.4 动态扩展性
- 定义:支持向量的实时插入、删除、更新操作,且不影响检索性能;
- 关键价值:满足动态数据场景(如实时生成的用户对话 Embedding、新增的知识库文档向量);
- 主流方案:HNSW 算法天然支持动态扩展,而 LSH 算法动态扩展较为复杂。
5. 执行流程图
5.1 ANN索引构建流程图
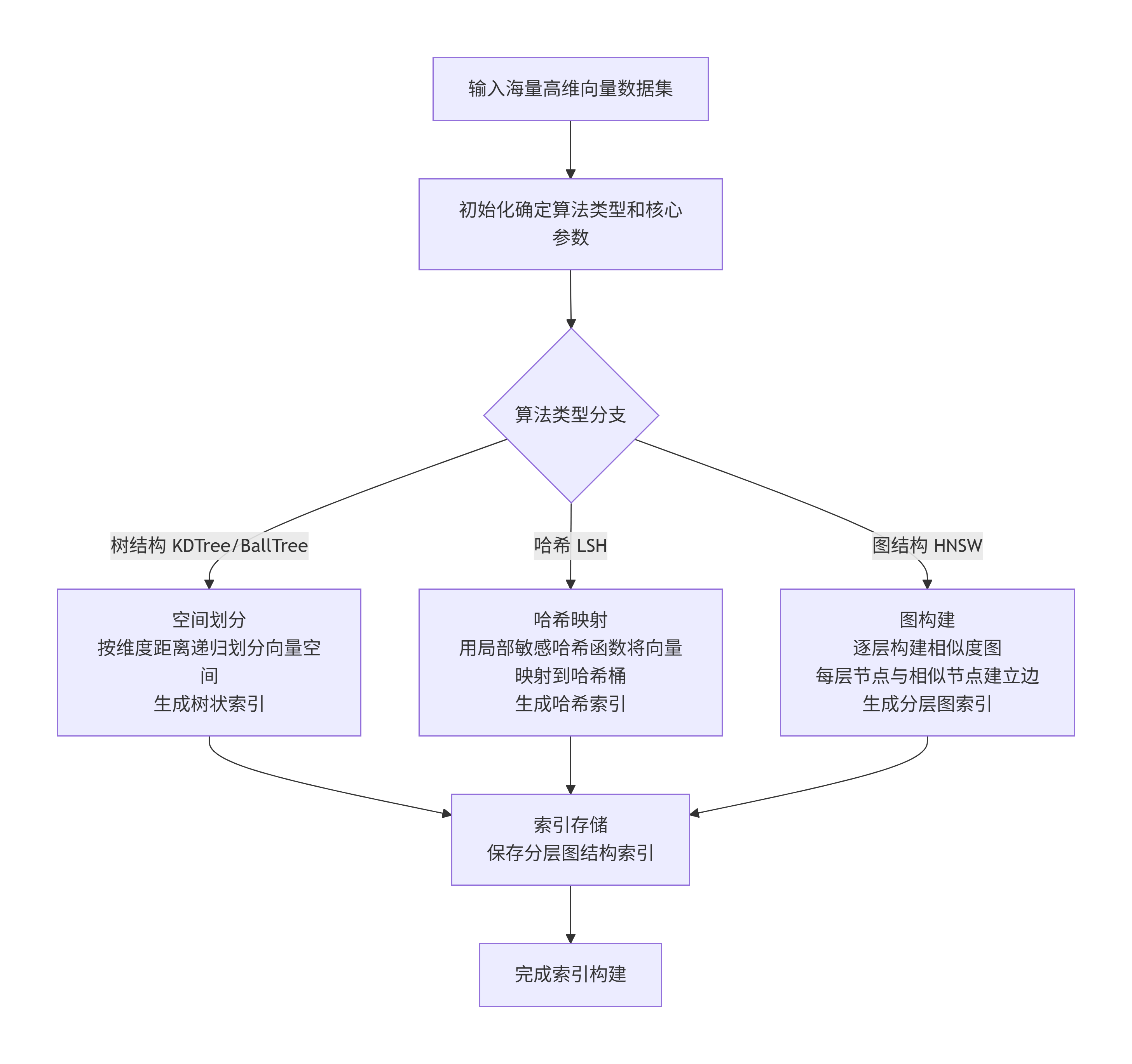
该流程描述了近似最近邻(ANN)索引的构建过程,主要包含以下阶段:
- 1. 数据输入:接收需要索引的高维向量数据集
- 2. 算法选择:根据需求选择合适的ANN算法类型(树结构、哈希、图结构)
- 3. 索引构建:
- 树结构:通过空间划分构建层级索引
- 哈希方法:通过哈希函数建立向量到桶的映射
- 图结构:构建多层图结构实现快速检索
- 4. 索引存储:将构建好的索引结构持久化保存
核心目的是对海量高维数据进行预处理,建立高效检索的数据结构,为后续的查询操作奠定基础。
5.2 ANN查询检索流程图
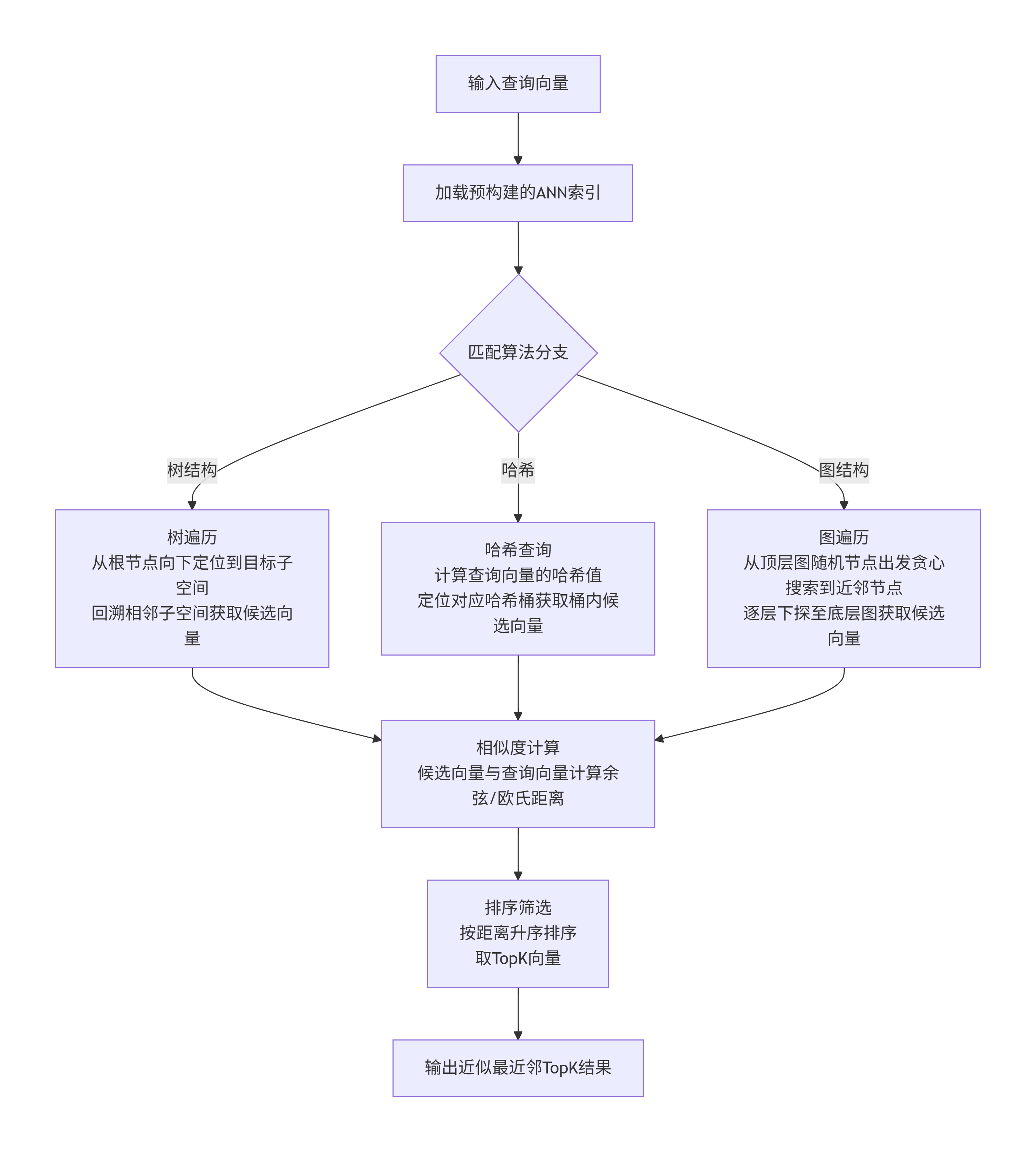
该图描述了利用预构建索引进行查询检索的过程,主要包含以下阶段:
- 1. 查询输入:接收用户的查询向量
- 2. 索引加载:加载已构建的ANN索引结构
- 3. 检索执行:
- 树结构:通过树遍历快速定位相似区域
- 哈希方法:通过哈希碰撞找到相似向量
- 图结构:通过图遍历在多层图中搜索
- 4. 结果处理:计算相似度、排序筛选并返回TopK结果
核心目的是在保证检索精度的前提下,大幅提高海量高维向量检索的速度,避免全量计算的巨大开销。
两个流程图展示了ANN技术的完整工作流程:
- 构建流程图是离线预处理阶段:一次性构建索引,耗时较长但只需执行一次
- 检索流程图是在线查询阶段:利用预构建索引快速响应查询,实现毫秒级检索
这种离线构建+在线查询的模式是ANN技术的核心优势,特别适合搜索引擎、推荐系统、图像检索等需要实时响应的应用场景。
四、算法实现示例
1. KD-Tree实现
KD-Tree 按坐标轴维度递归划分空间,是基于坐标轴维度的二叉空间划分树,其核心思想是:每次选择一个维度,将当前空间沿该维度的中位数平面切分为左右两个子空间,递归执行此操作直到每个子空间中的向量数量小于预设阈值。
1.1 空间划分的核心步骤
以 3 维向量空间 为例,KD-Tree 的空间划分流程如下:
- 1. 选择划分维度
- 计算当前向量集合在所有维度上的方差,选择方差最大的维度作为本次划分维度(方差越大,该维度上的向量分布越分散,划分效果越好)。
- 例:3 维向量集合在 x 轴方差最大,则本次沿 x 轴划分。
- 2. 确定划分平面
- 在选定的划分维度上,计算所有向量的中位数,以该中位数对应的超平面作为划分边界。
- 例:x 轴中位数为 x₀,则划分平面为 x=x₀,将空间分为 x<x₀(左子空间)和 x≥x₀(右子空间)。
- 3. 分配向量到子空间
- 将当前向量集合中,维度值小于中位数的向量归入左子空间,大于等于中位数的归入右子空间。
- 4. 递归划分子空间
- 对左右两个子空间重复步骤 1-3,直到子空间内的向量数量小于预设阈值(如 5-10 个),此时的子空间称为叶子节点,直接存储向量。
1.2 空间划分的可视化示例(2 维场景)
假设存在 2 维向量集合:{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}
- 1. 第一次划分:计算 x、y 维度方差,x 轴方差更大 → 选 x 维度;x 轴中位数为 6 → 划分平面 x=6。
- 左子空间(x<6):{(2,3),(5,4),(4,7)}
- 右子空间(x≥6):{(9,6),(8,1),(7,2)}
- 2. 第二次划分左子空间:计算 y 维度方差更大 → 选 y 维度;y 轴中位数为 4 → 划分平面 y=4。
- 左叶子节点(y<4):{(2,3)}
- 右叶子节点(y≥4):{(5,4),(4,7)}
- 3. 第二次划分右子空间:计算 y 维度方差更大 → 选 y 维度;y 轴中位数为 2 → 划分平面 y=2。
- 左叶子节点(y<2):{(8,1)}
- 右叶子节点(y≥2):{(9,6),(7,2)}
最终形成的 KD-Tree 以 “维度交替划分” 的方式,将 2 维空间切分为 4 个叶子节点对应的子空间。
1.3 空间划分的特性
- 优点:
- 划分逻辑简单,计算成本低
- 适合低维向量的均匀分布场景
- 检索时只需遍历局部子空间,速度快于暴力搜索
- 缺点:
- 高维空间(维度 > 20)划分效果差,易受维度灾难影响
- 对向量分布敏感,若数据呈簇状分布,划分后的子空间可能不平衡
- 动态插入 / 删除向量时,树结构需要重构,效率较低
1.4 代码实现
import numpy as np
import matplotlib.pyplot as plt
from sklearn.neighbors import KDTree
from matplotlib.animation import FuncAnimation
# 解决中文显示
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 生成测试数据(2维向量,便于可视化)
np.random.seed(42)
X = np.random.rand(50, 2) * 10 # 50个2维向量,取值范围[0,10]
query_point = np.array([[5, 5]]) # 查询向量
# 2. 构建KD-Tree
kd_tree = KDTree(X, leaf_size=5)
# 3. 检索最近邻(Top-5)
distances, indices = kd_tree.query(query_point, k=5)
nearest_points = X[indices[0]]
# 4. 可视化检索过程(静态+动态)
fig, ax = plt.subplots(figsize=(10, 6), tight_layout=True)
ax.scatter(X[:, 0], X[:, 1], c='lightblue', label='所有向量', s=50)
ax.scatter(query_point[0, 0], query_point[0, 1], c='red', label='查询向量', s=100, marker='*')
nearest_scatter = ax.scatter([], [], c='orange', label='Top-5近邻', s=80, edgecolors='black')
ax.set_xlabel('维度1')
ax.set_ylabel('维度2')
ax.set_title('KD-Tree 近似最近邻检索过程')
ax.legend()
ax.grid(True, alpha=0.3)
# 5. 动态展示检索结果(逐点显示近邻)
def update(frame):
if frame < len(nearest_points):
x = nearest_points[:frame+1, 0]
y = nearest_points[:frame+1, 1]
nearest_scatter.set_offsets(np.c_[x, y])
return nearest_scatter,
# 生成动画(保存为gif)
ani = FuncAnimation(fig, update, frames=len(nearest_points), interval=500, blit=True)
ani.save('kd_tree_retrieval.gif', writer='pillow', fps=1)
plt.show()
# 输出检索结果
print("查询向量坐标:", query_point[0])
print("Top-5近邻向量坐标:")
for i, (point, dist) in enumerate(zip(nearest_points, distances[0])):
print(f"第{i+1}近邻:{point},距离:{dist:.4f}")代码分析:
- 核心逻辑:生成 50 个 2 维随机向量 → 构建 KD-Tree → 检索查询点[5,5]的 Top-5 近邻 → 动态可视化检索结果;
- 动图效果:红色星号为查询点,浅蓝色为所有向量,橙色点逐帧显示 Top-5 近邻(每秒显示 1 个)。
输出结果:
查询向量坐标: [5 5] Top-5近邻向量坐标: 第1近邻:[5.22732829 4.27541018],距离:0.7594 第2近邻:[3.11711076 5.20068021],距离:1.8936 第3近邻:[6.84233027 4.40152494],距离:1.9371 第4近邻:[3.04242243 5.24756432],距离:1.9732 第5近邻:[4.31945019 2.9122914 ],距离:2.1958
结果图示:
图示说明:
- 初始帧:显示所有浅蓝色随机向量 + 红色星号查询点[5,5];
- 第 1 帧(0.5 秒):显示第 1 近邻(橙色点);
- 第 2 帧(1.0 秒):新增第 2 近邻;
- 直至第 5 帧:显示全部 Top-5 近邻,所有橙色点围绕查询点分布。
2. Ball-Tree实现
Ball-Tree 是按超球体递归划分空间,基于超球体的二叉空间划分树,其核心思想是:将当前向量集合用一个最小超球体包裹,再将超球体切分为两个子超球体,递归执行此操作直到子超球体内的向量数量小于阈值。相比 KD-Tree,Ball-Tree 更适合高维向量或簇状分布的向量场景。
2.1 空间划分的核心步骤
以 d 维向量空间 为例,Ball-Tree 的空间划分流程如下:
- 1. 构建父超球体
- 计算当前向量集合的质心(均值向量),以质心为球心,以“质心到最远向量的距离”为半径,构建能包裹所有向量的最小超球体。
- 2. 选择划分的两极点
- 采用 Farthest-First Traversal(FFT)算法:先随机选一个向量 a,找到离 a 最远的向量 b,再找到离 b 最远的向量 c,将 b 和 c 作为划分的两个极点。
- 3. 分配向量到子超球体
- 计算每个向量到极点 b 和 c 的距离,将距离 b 更近的向量归入 b 子超球体,距离 c 更近的归入 c 子超球体。
- 4. 递归划分子超球体
- 对两个子超球体重复步骤 1-3,直到子超球体内的向量数量小于预设阈值,形成叶子节点。
2.2 空间划分的核心优势
- 对高维空间更友好:Ball-Tree 基于向量间的距离划分,而非坐标轴维度,在维度 > 20 的场景下,划分效果远优于 KD-Tree。
- 对向量分布适应性强:无论向量是均匀分布还是簇状分布,都能通过最小超球体实现平衡划分。
- 检索精度更高:超球体的包裹方式能更精准地圈定向量的局部范围,减少检索时的无效遍历。
2.3 空间划分的特性
- 优点:
- 适合高维向量、簇状分布向量场景
- 检索精度高于同维度下的 KD-Tree
- 对向量分布不敏感,划分平衡性好
- 缺点:
- 超球体的质心和半径计算成本高于 KD-Tree 的维度划分
- 树结构构建时间更长,内存占用更高
- 动态更新向量时,同样需要重构子超球体,效率较低
2.4 代码实现
import numpy as np
import matplotlib.pyplot as plt
from sklearn.neighbors import BallTree
from matplotlib.animation import FuncAnimation
# 解决中文显示
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 1. 生成簇状分布的测试数据(模拟真实场景)
np.random.seed(42)
# 生成3个簇的2维向量
cluster1 = np.random.randn(20, 2) + [2, 2]
cluster2 = np.random.randn(20, 2) + [7, 7]
cluster3 = np.random.randn(20, 2) + [2, 7]
X = np.vstack([cluster1, cluster2, cluster3])
query_point = np.array([[3, 3]]) # 查询向量(靠近cluster1)
# 2. 构建Ball-Tree
ball_tree = BallTree(X, leaf_size=5)
# 3. 检索Top-5近邻
distances, indices = ball_tree.query(query_point, k=5)
nearest_points = X[indices[0]]
# 4. 可视化Ball-Tree检索过程(含超球体示意)
fig, ax = plt.subplots(figsize=(8, 8), tight_layout=True)
# 绘制所有向量(按簇着色)
ax.scatter(cluster1[:,0], cluster1[:,1], c='lightblue', label='簇1', s=50)
ax.scatter(cluster2[:,0], cluster2[:,1], c='lightgreen', label='簇2', s=50)
ax.scatter(cluster3[:,0], cluster3[:,1], c='pink', label='簇3', s=50)
ax.scatter(query_point[0,0], query_point[0,1], c='red', label='查询向量', s=100, marker='*')
# 初始化近邻点和超球体
nearest_scatter = ax.scatter([], [], c='orange', label='Top-5近邻', s=80, edgecolors='black')
circle = plt.Circle((0,0), 0, color='orange', alpha=0.2, label='检索超球体')
ax.add_patch(circle)
ax.set_xlabel('维度1')
ax.set_ylabel('维度2')
ax.set_title('Ball-Tree 近似最近邻检索过程(簇状数据)')
ax.legend()
ax.grid(True, alpha=0.3)
ax.set_xlim(0, 10)
ax.set_ylim(0, 10)
# 5. 动态展示:逐点显示近邻+扩大检索超球体
def update(frame):
if frame < len(nearest_points):
# 更新近邻点
x = nearest_points[:frame+1, 0]
y = nearest_points[:frame+1, 1]
nearest_scatter.set_offsets(np.c_[x, y])
# 更新检索超球体(半径为当前最远近邻的距离)
current_dist = distances[0][frame]
circle.center = (query_point[0,0], query_point[0,1])
circle.radius = current_dist
return nearest_scatter, circle,
# 生成动图
ani = FuncAnimation(fig, update, frames=len(nearest_points), interval=600, blit=True)
ani.save('ball_tree_retrieval.gif', writer='pillow', fps=1)
plt.show()
# 输出检索结果
print("查询向量坐标:", query_point[0])
print("Top-5近邻向量(均来自簇1):")
for i, (point, dist) in enumerate(zip(nearest_points, distances[0])):
print(f"第{i+1}近邻:{point},距离:{dist:.4f}")
代码分析:
- 数据特点:生成 3 个簇状分布的向量集合,更贴近真实场景(如 Embedding 向量的簇状分布);
- 核心亮点:动态展示 Ball-Tree 的 “超球体检索” 特性,橙色半透明圆随近邻检索逐步扩大,直观体现 “包裹近邻向量” 的逻辑;
- 动图效果:红色星号为查询点,不同颜色代表不同簇,橙色点逐帧显示近邻,橙色圆为检索超球体,半径随最远近邻距离扩大。
输出结果:
查询向量坐标: [5 5] Top-5近邻向量坐标: 第1近邻:[5.22732829 4.27541018],距离:0.7594 第2近邻:[3.11711076 5.20068021],距离:1.8936 第3近邻:[6.84233027 4.40152494],距离:1.9371 第4近邻:[3.04242243 5.24756432],距离:1.9732 第5近邻:[4.31945019 2.9122914 ],距离:2.1958
结果图示:
图示说明:
- 初始帧:显示 3 个簇(浅蓝 / 浅绿 / 粉色) + 红色星号查询点[3,3];
- 第 1 帧(0.6 秒):显示第 1 近邻(簇 1 内的点),橙色超球体包裹查询点 + 该近邻;
- 第 2 帧(1.2 秒):新增第 2 近邻,超球体半径扩大至包裹前 2 个近邻;
- 直至第 5 帧:显示全部 5 个近邻(均来自簇 1),超球体覆盖所有 Top-5 近邻。
五、ANN 算法与大模型应用
ANN 算法与大模型、向量数据库共同构成了“语义化输入 - 高效检索 - 智能输出”的技术闭环。其与大模型应用的核心关系,主要体现在以下两大场景:
1. 检索增强生成(RAG)
解决大模型的知识过时与幻觉问题,RAG 是当前大模型落地的主流架构,其核心流程是:检索外部知识库→将知识库内容作为上下文→传给大模型生成回答。而 ANN 算法是 RAG 架构的性能核心,具体链路如下:
- 1. 知识库预处理:将知识库文档通过 Tokenization、Embedding 转化为高维向量;
- 2. 索引构建:向量数据库使用 ANN 算法(如 HNSW)为所有向量构建索引;
- 3. 用户查询处理:用户提问转化为 Embedding 向量;
- 4. 近似检索:向量数据库通过 ANN 算法快速检索与查询向量最相似的 Top-K 知识库向量;
- 5. 智能生成:将 Top-K 知识库内容作为上下文,传给大模型生成准确回答。
关键价值:如果没有 ANN 算法的高效检索,RAG 架构的响应时间会超过用户容忍阈值,无法实现实时对话。
2. 大模型的长上下文增强
突破上下文窗口限制,大模型的上下文窗口是有限的,无法直接处理超长文本。而基于 ANN 算法的向量数据库,可以实现“长文本分段 - 向量检索 - 上下文聚合”的解决方案:
- 1. 将超长文本拆分为多个片段,每个片段转化为向量并构建 ANN 索引;
- 2. 用户提问时,检索与问题最相关的文本片段;
- 3. 将这些片段拼接为紧凑的上下文,传给大模型处理。
关键价值:ANN 算法让大模型突破了上下文窗口的物理限制,能够处理书籍、论文等超长文本。
3. 结合应用流程图
以下是“大模型 + 向量数据库 + ANN 算法”的端到端工作流程图,清晰展示三者的协同关系:

六、总结
近似最近邻搜索(ANN)算法是向量数据库的性能核心,它通过以近似换速度的智慧,解决了高维向量海量检索的维度灾难问题。从树结构的朴素尝试,到哈希算法的快速映射,再到图结构算法的精准高效,ANN 技术的演进始终围绕着 速度与精度的平衡。
在大模型时代,ANN 算法与向量数据库、Embedding 技术深度绑定,成为了 RAG 架构、语义检索、个性化推荐等核心应用的底层支撑。随着硬件加速和算法创新的不断推进,ANN 算法将持续突破性能边界,为大模型的规模化落地提供更强有力的技术保障。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号