
从归一化向量和实数距离求出世界坐标
从归一化向量和实数距离求出世界坐标
提问于 2022-10-03 13:52:18
我有下一个场景,观察前方和物体的摄像机(注:我不知道这个物体的世界坐标)。

我需要找到物体的世界坐标。我有下一个财产:
distance
- camera
- 归一化方向矢量
- matrix4x4
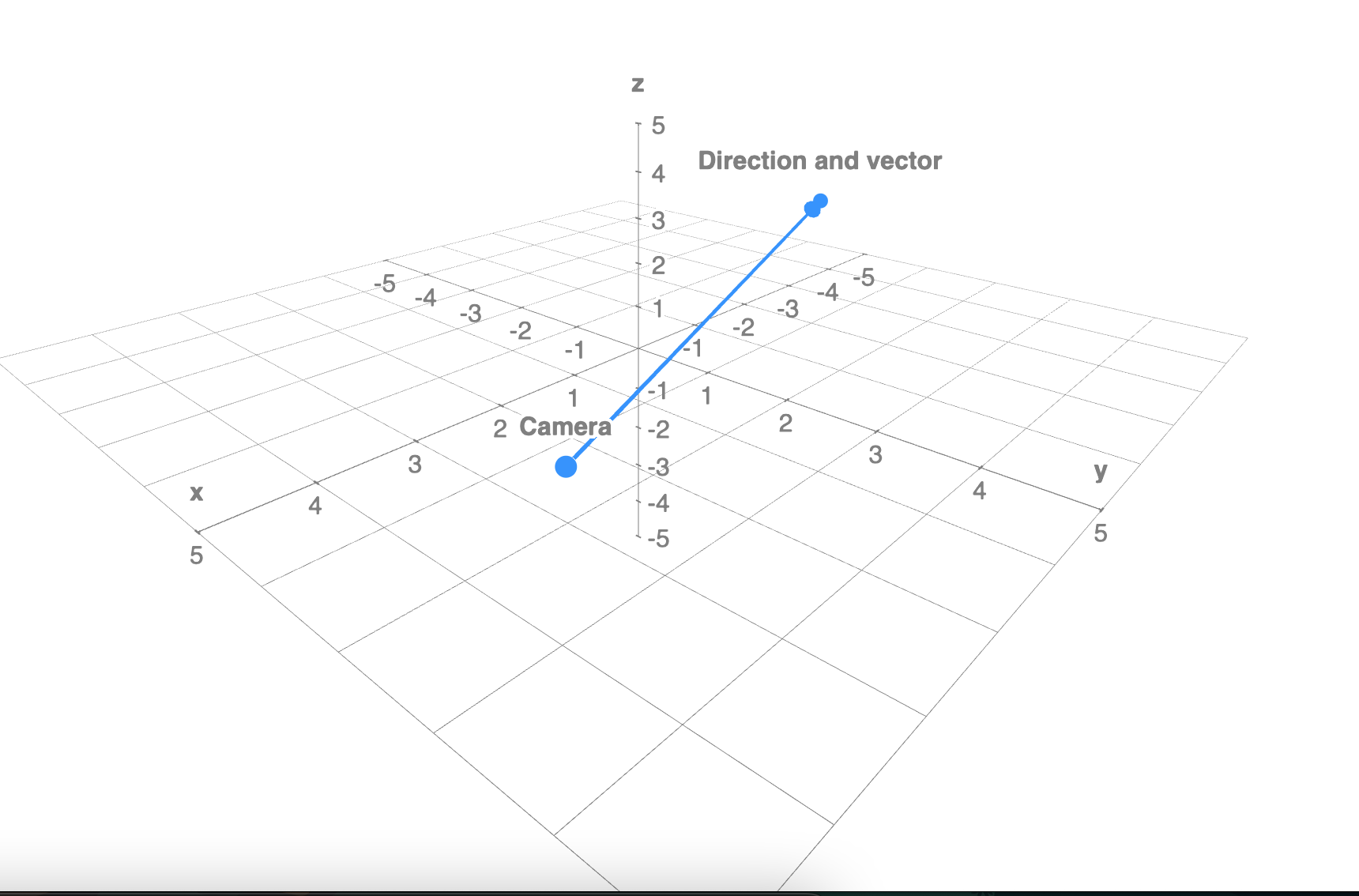
注:向量是归一化的,这个向量从相机开始,而不是从零开始。如果我只知道这些属性,我如何计算对象的世界坐标。有人能解释一下吗。
回答 1
Stack Overflow用户
发布于 2022-10-03 14:09:10
设C为摄像机位置矢量(从原点到摄像机的矢量)。
将Ob设为目标位置向量。
然后,从摄像机到对象的向量(称为COb)是C和Ob之间的区别。
特别是COb =COb。这意味着Ob =C- COb => Ob =C- (RD * NDV)
其中RD =实距离,NDV =归一化方向向量。
我只是把它弄掉这样我就可以用一个负号离开了。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/73936472
复制相关文章
相似问题
腾讯云开发者
