
从数据点计算加速度
从数据点计算加速度
提问于 2020-06-21 15:50:40
我有一个伺服电机,这个伺服电机,我想让它尽可能地遵循一个“运动模式”,并使用相同的值进行加减速。
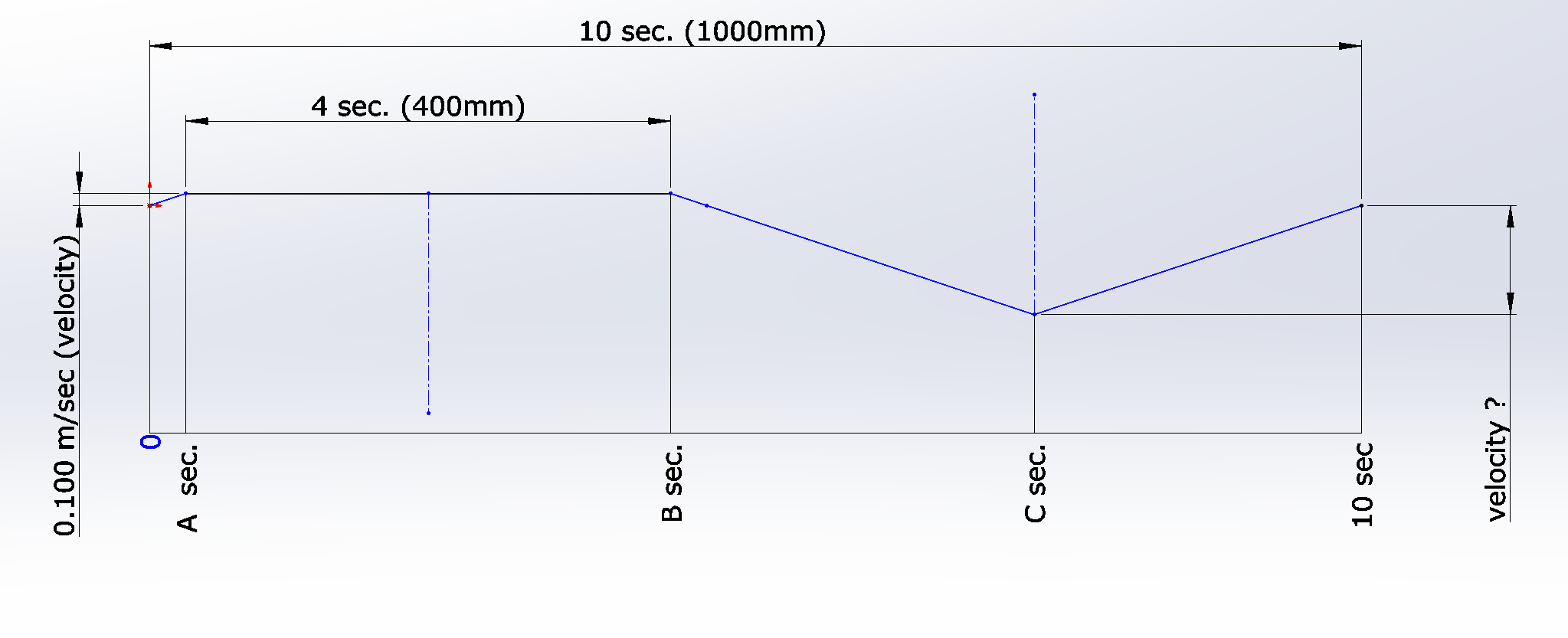
附图说明了“运动模式”(Y =速度,X=时间)
运动模式:
- 加速0m/s至0.100 m/s。
- 恒速0.100米/秒,持续4秒。
- 减速为负?m/s。
- 加速到0m/s,电机位置= 0。
如何计算加减速?
到目前为止,我尝试的是:
时间=(总时间-恒速时间)10-4=6秒。距离=(总距离-恒定速度距离)1- 0.4 =0.6米。加速度= (2 *距离/(时间^2)2* 0.6 / sqr(6) = 0.0333m/s。
但是,随着加速度的增加,它朝负方向的方向飞了500毫米。
回答 1
Stack Overflow用户
发布于 2020-06-23 13:36:17
看看PLC开放运动功能块,例如MC_MoveRelative和MC_MoveContinuesRelative块:
正如Sergey已经指出的,您可以通过输入所需的所有参数并将这些块集成到一个步骤链中来使用这些块来创建一个运动配置文件。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/62500945
复制相关文章
相似问题
腾讯云开发者
