
旋转矢量转换为旋转矩阵的罗德里格斯公式
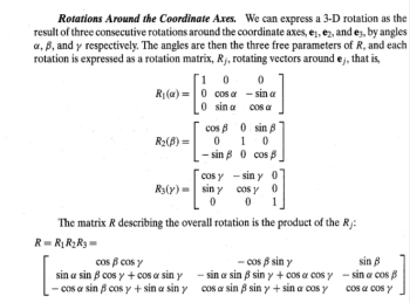
我试图理解三维旋转矢量到旋转矩阵的转换。假设我有一个三维旋转向量a,b,g。从Trucco等人的“3D计算机视觉入门技术”中,我相信我可以把它表示为每个轴x,y,z的旋转矩阵的乘积。
但是更多的时候,我看到这种从旋转矢量到矩阵的转换,使用的是罗德里格斯公式,在下面的图像中给出了A.17

我正在Matlab中测试这两种方法(我使用的是执行罗德里格斯函数的Matlab图像处理工具箱中内置的rotationVectorToMatrix函数),对于小角色,我得到的结果非常接近。
alpha = 1 * (pi/180);
beta = 2 * (pi/180);
gamma = 3 * (pi/180);
R = [(cos(beta) * cos(gamma)) (-cos(beta)*sin(gamma)) sin(beta);
sin(alpha) * sin(beta) * cos(gamma) + cos(alpha)*sin(gamma) ...
-sin(alpha) * sin(beta) * sin(gamma) + cos(alpha) * cos(gamma) ...
-sin(alpha) * cos(beta); ...
-cos(alpha)*sin(beta)*cos(gamma) + sin(alpha)*sin(gamma) ...
cos(alpha) * sin(beta) * sin(gamma) + sin(alpha) * cos(gamma) ...
cos(alpha) * cos(gamma)]
Rm = rotationVectorToMatrix([alpha beta gamma])'我得到了
R =
0.9980 -0.0523 0.0349
0.0529 0.9984 -0.0174
-0.0339 0.0193 0.9985
Rm =
0.9980 -0.0520 0.0353
0.0526 0.9985 -0.0165
-0.0344 0.0184 0.9992但是,当我的角度变大时,它们会有点发散,例如,如果我做了
alpha = 10 * (pi/180);
beta = 20 * (pi/180);
gamma = 30 * (pi/180);我得到了
R =
0.8138 -0.4698 0.3420
0.5438 0.8232 -0.1632
-0.2049 0.3188 0.8529
Rm =
0.8089 -0.4578 0.3689
0.5166 0.8530 -0.0742
-0.2807 0.2506 0.9265再一次,我只是想得到一个更好的理解,这些方法是从旋转向量转换成矩阵等价的吗?我应该一直用罗德里格斯的方法吗?如果是的话,为什么?谢谢你的帮助。
回答 1
Stack Overflow用户
发布于 2021-02-19 19:19:09
“旋转矢量”假定角度是同时的。因此,使用欧拉角是不合适的比较,假设顺序的角度。对于小角度,你会得到一些接近,但对于较大的角度,它将得到显著的差异。
一个恰当的比较将是四元数,它也假设同时的角度,在同样的意义上,一个旋转矢量。所以就像
V = [alpha beta gamma];
angle = norm(V);
q = [cos(angle/2) sin(angle/2)*V/angle];那就拿这个做比较。例如,
quat2dcm(q)编辑
如果您没有MATLAB航天工具箱,那么您可以手动完成此转换。航天工具箱使用标量向量顺序,右链,右手汉密尔顿惯例.因此,转换将是:
qw = q(1); qv = q(2:4); % note qv is a row vector here
skew = @(v)[0 -v(3) v(2);v(3) 0 -v(1);-v(2) v(1) 0];
dcm = (qw^2 - qv*qv')*eye(3) + 2*qv'*qv - 2*qw*skew(qv) % right-chain Hamilton机器人工具箱使用的是左链约定,因此,如果您要比较工具箱中的函数,则需要翻转交叉乘积项的符号。例如,
dcm = (qw^2 - qv*qv')*eye(3) + 2*qv'*qv + 2*qw*skew(qv) % left-chain Hamilton如果你比较左撇子四元数惯例(又名JPL),交叉乘积项会在翻转符号上倾斜。所以它归结为
% right-chain right-handed Hamilton OR left-chain left-handed JPL
dcm = (qw^2 - qv*qv')*eye(3) + 2*qv'*qv - 2*qw*skew(qv)
% left-chain right-handed Hamilton OR right-chain left-handed JPL
dcm = (qw^2 - qv*qv')*eye(3) + 2*qv'*qv + 2*qw*skew(qv)右链是指在三重四元数旋转操作(通常用于两个不同坐标系之间的被动坐标系转换)中,未修改的四元数出现在右侧:
vnew = q^-1 * v * q左链是指在三重四元数旋转操作中,未修改的四元数出现在左侧(通常用于在同一坐标系内的主动矢量旋转):
vnew = q * v * q^-1右撇子意味着四元数的虚单位像正则交叉积项一样相乘。例如,
i * j = k
j * k = i
k * i = j左撇子意味着四元数的虚单位像正则交叉积项的负数一样相乘。也就是说,就像一个左手坐标系。例如,
i * j = -k
j * k = -i
k * i = -j当然,如果您使用的是向量-标量顺序的四元数,则需要从上面取出标量和向量部分。
https://stackoverflow.com/questions/66279458
复制相似问题
腾讯云开发者
