
与照相机有关的激光校准
与照相机有关的激光校准
提问于 2013-12-02 09:53:46
对于一个简单的激光扫描仪,我希望使用一个单一的摄像头和线激光。相机标定本身是相当琐碎的,但相对旋转和移动的激光在相机的框架证明是有点困难的。
是否有“标准”的方法来做这样的事情?我认为,将激光投射到棋盘上,并以某种方式利用棋盘的已知方向,将提供所需的信息。
-编辑--
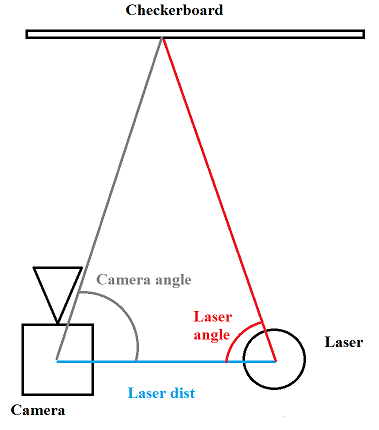
附图的设置,这应该提供更多的信息。由于棋盘,飞机的位置是已知的。摄像机的角度也是已知的。校准需要恢复LaserDist (从相机坐标到激光坐标的转换)和激光角度。
在理想的情况下,线激光器本身的旋转也会被考虑在内(例如,除了在y轴上旋转用来三角测量外,如果直线不是完全垂直的,那将是有趣的)。
回答 2
Stack Overflow用户
回答已采纳
发布于 2014-04-29 10:13:37
我最终实现的方法是相对直接的。
通过将激光投射到棋盘上(从摄像机的参照系上有已知的旋转/平移),我们可以找到一条3D点线。通过使用棋盘的多个变换,我们可以在激光平面上找到多条点线。然后,这些点可以给出平面拟合算法。
如果激光可以旋转,则可以使用激光的多个方向。通过将两个激光平面相交,可以找到激光模块的旋转轴。
Stack Overflow用户
发布于 2015-07-13 21:18:06
这里有matlab代码来解决这个问题:
http://research.engineering.wustl.edu/~pless/code.html
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/20325323
复制相关文章
相似问题
腾讯云开发者
