
视频中的多重跟踪
视频中的多重跟踪
提问于 2014-09-10 17:11:13
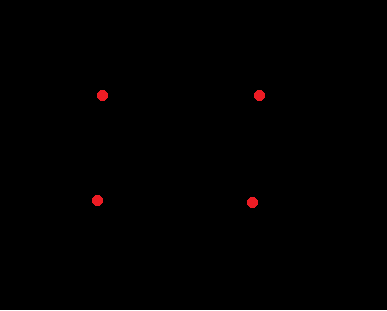
我正在工作的小图像处理任务,我需要跟踪4红色物体。我知道如何追踪单曲了。我想知道追踪不止一个点的最佳方法是什么。
有四个点是定位成一个矩形,所以我可以使用形状检测或角点检测和跟踪点,请参阅下图。
回答 3
Stack Overflow用户
回答已采纳
发布于 2014-09-14 21:27:57
我的简单实现使用了OpenCV包围盒描述的一种技术来跟踪红色斑点。
下面是一个帮助函数,用于检索所有检测到的红色对象的中心:
/* get_positions: a function to retrieve the center of the detected blobs.
* largely based on OpenCV's "Creating Bounding boxes and circles for contours" tutorial.
*/
std::vector<cv::Point2f> get_positions(cv::Mat& image)
{
if (image.channels() > 1)
{
std::cout << "get_positions: !!! Input image must have a single channel" << std::endl;
return std::vector<cv::Point2f>();
}
std::vector<std::vector<cv::Point> > contours;
cv::findContours(image, contours, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
// Approximate contours to polygons and then get the center of the objects
std::vector<std::vector<cv::Point> > contours_poly(contours.size());
std::vector<cv::Point2f> center(contours.size());
std::vector<float> radius(contours.size());
for (unsigned int i = 0; i < contours.size(); i++ )
{
cv::approxPolyDP(cv::Mat(contours[i]), contours_poly[i], 5, true );
cv::minEnclosingCircle((cv::Mat)contours_poly[i], center[i], radius[i]);
}
return center;
} 我编写了代码来测试我的方法,通过从网络摄像头捕捉帧来实时测试我的方法。整个过程与@Dennis描述的非常相似(对不起,当您提交答案时,我已经在编写代码)。
好吧,这就是真正的乐趣开始。
int main()
{
// Open the capture device. My webcam ID is 0:
cv::VideoCapture cap(0);
if (!cap.isOpened())
{
std::cout << "!!! Failed to open webcam" << std::endl;
return -1;
}
// Let's create a few window titles for debugging purposes
std::string wnd1 = "Input", wnd2 = "Red Objs", wnd3 = "Output";
// These are the HSV values used later to isolate RED-ish colors
int low_h = 160, low_s = 140, low_v = 50;
int high_h = 179, high_s = 255, high_v = 255;
cv::Mat frame, hsv_frame, red_objs;
while (true)
{
// Retrieve a new frame from the camera
if (!cap.read(frame))
break;
cv::Mat orig_frame = frame.clone();
cv::imshow(wnd1, orig_frame);orig_frame

// Convert BGR frame to HSV to be easier to separate the colors
cv::cvtColor(frame, hsv_frame, CV_BGR2HSV);
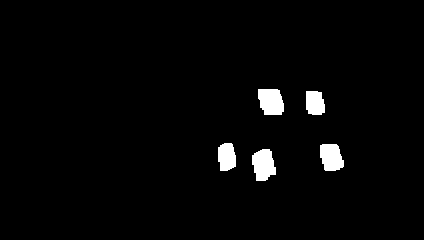
// Isolate red colored objects and save them in a binary image
cv::inRange(hsv_frame,
cv::Scalar(low_h, low_s, low_v),
cv::Scalar(high_h, high_s, high_v),
red_objs);
// Remove really small objects (mostly noises)
cv::erode(red_objs, red_objs, cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3)));
cv::dilate(red_objs, red_objs, cv::getStructuringElement(cv::MORPH_RECT, cv::Size(7, 7)));
cv::Mat objs = red_objs.clone();
cv::imshow(wnd2, objs);objs
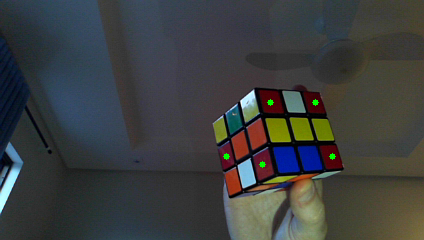
// Retrieve a vector of points with the (x,y) location of the objects
std::vector<cv::Point2f> points = get_positions(objs);
// Draw a small green circle at those locations for educational purposes
for (unsigned int i = 0; i < points.size(); i++)
cv::circle(frame, points[i], 3, cv::Scalar(0, 255, 0), -1, 8, 0);
cv::imshow(wnd3, frame);
char key = cv::waitKey(33);
if (key == 27) { /* ESC was pressed */
//cv::imwrite("out1.png", orig_frame);
//cv::imwrite("out2.png", red_objs);
//cv::imwrite("out3.png", frame);
break;
}
}
cap.release();
return 0;
}Stack Overflow用户
发布于 2014-09-10 18:31:54
以下是我在GitHub上的实现:youtube上的https://github.com/Smorodov/Multitarget-tracker视频:3 3RXRu pdVw
简言之:
- 探测物体。此步骤提供了一组点(检测到的对象坐标)。
- 求解一个赋值问题(矩形匈牙利算法)。此步骤将检测到的对象分配给现有轨道。
- 管理未分配/丢失的航迹。这一步删除多个连续漏检的轨道,并为新的检测添加跟踪。
- 应用统计滤波器对每个轨道(在这种情况下的卡尔曼滤波),用于预测丢失的检测和平滑跟踪对象的动力学信息(定义在卡尔曼滤波矩阵)。
顺便说一下,要得到4个点的坐标,你只需要知道3个点的坐标,因为你的图案是矩形的,你可以计算第4个点。
Stack Overflow用户
发布于 2014-09-14 18:42:10
以下是多色对象跟踪的步骤:
对于每个帧,执行以下步骤:
- 使用简历:cvtColor()将输入图像转换为HSV颜色空间
- 使用简历:inRange()分割红色对象
- 使用简历:findContours()从图像中提取每个blob
- 对于每个blob,使用简历:拟()计算其中心
- 匹配上一个帧中的小块,再加上一些移动到当前的小块,比较它们的中心之间的距离->如果它们的距离最小,就匹配它们。
这是算法的基础。然后,当blob进入图像时(在当前帧中有blob,但在前一个帧中没有关闭blob ),或者离开图像(在前一个帧中有一个blob,但在当前帧中没有关闭blob),您必须处理这些情况。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/25771252
复制相关文章
相似问题
腾讯云开发者
