
JavaFX 8三维场景交点
在JavaFX 8三维场景中,是否有可能沿着射线(例如PickRay)找到点,从三维空间中的任意点开始,用某种三维方向向量,其中光线与网格中的三角形(TriangleMesh在MeshView中)相交?
我知道这是在相机/鼠标处理器中做的鼠标选择,但我看不出有任何方法来做任意射线。
回答 2
Stack Overflow用户
发布于 2014-12-23 01:09:57
正如@ just 1581所建议的那样,射线只是一个几何向量,因此为了找到由这个向量相交的三角形列表,我们需要解决‘线相交平面’和‘三角形边界内的直线相交平面’的问题。
假设我们有一个TriangleMesh,我们有一个顶点列表和一个面列表。每个顶点有3个坐标,每个面有3个顶点(不考虑纹理,法线,. )。为了简单起见,让我们使用两个Point3D列表来存储它们。
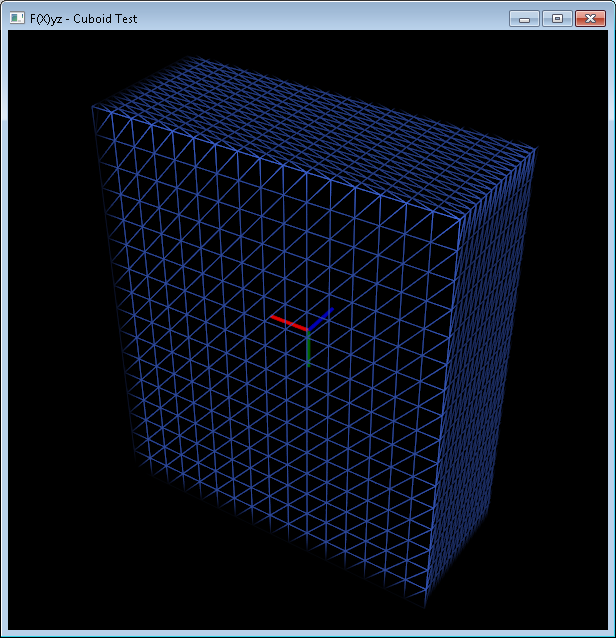
在这个链接中有几个可以使用的三维形状。我们去拿一个CuboidMesh。
CuboidMesh cuboid = new CuboidMesh(10f,12f,4f,4);这将给我们这个三维形状:
现在,如果我们看一下网格,我们可以创建两个包含顶点和面的列表:
List<Point3D> vertices=Arrays.asList(new Point3D(5.0, 6.0, 2.0),
new Point3D(5.0, 6.0, 2.0), new Point3D(5.0, -6.0, 2.0), ...,
new Point3D(-1.875, -2.25, -2.0), new Point3D(-1.875, -1.5, -2.0));
List<Point3D> faces=Arrays.asList(new Point3D(0, 386, 388),
new Point3D(98, 387, 386.0), new Point3D(100, 388, 387), ...,
new Point3D(383, 1535, 1537), new Point3D(1536, 1537, 1535));让我们在场景中添加一些三维点,一个原点和一个目标,都在全局坐标中,并定义矢量的方向,归一化:
Point3D gloOrigin=new Point3D(4,-7,-4);
Point3D gloTarget=new Point3D(2,3,2);
Point3D direction=gloTarget.subtract(gloOrigin).normalize(); // -0.154,0.771,0.617射线方程是这样的:
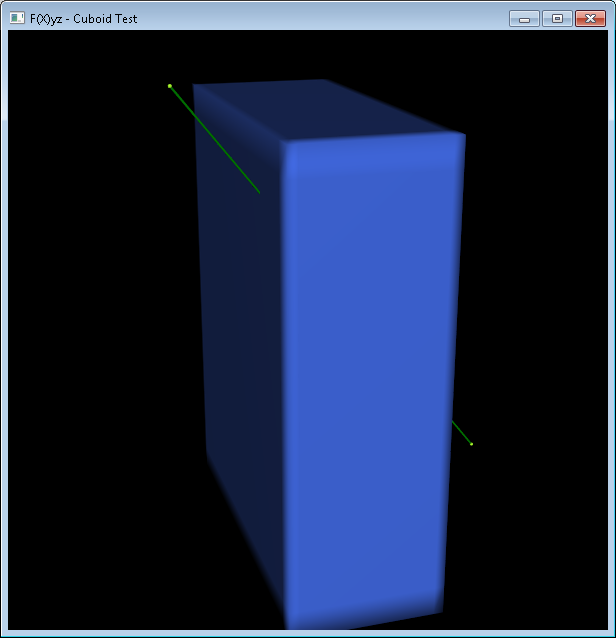
r(t) = (4,-7,-4)+t*(-0.154,0.771,0.617)如果在这两个点之间加上一个细长的圆柱体,我们就可以直观地表示我们的光线:
边界盒交
第一步是检查光线是否与我们形状的包围盒相交。在这个形状的局部坐标中,我们有6张由法线给出的脸,它们的6个中心:
Bounds locBounds = cuboid.getBoundsInLocal();
List<Point3D> normals=Arrays.asList(new Point3D(-1,0,0),new Point3D(1,0,0),
new Point3D(0,-1,0), new Point3D(0,1,0), new Point3D(0,0,-1), new Point3D(0,0,1));
List<Point3D> positions=Arrays.asList(new Point3D(locBounds.getMinX(),0,0),
new Point3D(locBounds.getMaxX(),0,0), new Point3D(0,locBounds.getMinY(),0),
new Point3D(0,locBounds.getMaxY(),0), new Point3D(0,0,locBounds.getMinZ()),
new Point3D(0,0,locBounds.getMaxZ()));由于我们将在本地系统上工作,我们需要在这个坐标中的起始点:
Point3D gloOriginInLoc = cuboid.sceneToLocal(gloOrigin); // 4,-7,-4 since the box is centered in 0,0,0现在,对于这六个面中的任意一个,我们得到t到这个链接后面的飞机的距离。然后我们可以检查这个点是否属于这个盒子。
AtomicInteger counter = new AtomicInteger();
IntStream.range(0, 6).forEach(i->{
double d=-normals.get(i).dotProduct(positions.get(i));
double t=-(gloOriginInLoc.dotProduct(normals.get(i))+d)/
(gloDirection.dotProduct(normals.get(i)));
Point3D locInter=gloOriginInLoc.add(gloDirection.multiply(t));
if(locBounds.contains(locInter)){
counter.getAndIncrement();
}
});如果是counter.get()>0,那么在光线和形状之间有一些交点,我们可以继续进行三角形。在这个例子中,这些是交点:(3.5,-4.5,-2)和(2.5,0.5,2)。
三角形相交
有几种算法用于寻找光线是否与网格中的任何三角形相交,所以我们不需要重新发明轮子。
我用过的是来自Tomas M ller和Ben Trumbore的。它将提供从原点到平面的距离t,以及给定的交点在三角形内的坐标u,v。
一旦我们得到了形状的局部坐标,并且知道了射线的方向,这个算法的实现如下:
private final float EPS = 0.000001f;
public List<Point3D> getIntersections(Point3D origin, Point3D direction,
List<Point3D> points, List<Point3D> faces){
return faces.parallelStream().filter(f->{
// vertices indices
int p0=(int)f.getX();
int p1=(int)f.getY();
int p2=(int)f.getZ();
// vertices 3D coordinates
Point3D a = points.get(p0);
Point3D b = points.get(p1);
Point3D c = points.get(p2);
Point3D edge1 = b.substract(a);
Point3D edge2 = c.substract(a);
Point3D pvec=direction.crossProduct(edge2);
float det=edge1.dotProduct(pvec);
if(det<=-EPS || det>=EPS){
float inv_det=1f/det;
Point3D tvec=origin.substract(a);
float u = tvec.dotProduct(pvec)*inv_det;
if(u>=0f && u<=1f){
Point3D qvec=tvec.crossProduct(edge1);
float v = direction.dotProduct(qvec)*inv_det;
if(v>=0 && u+v<=1f){
float t = c.dotProduct(qvec)*inv_det;
System.out.println("t: "+t+", u: "+u+", v: "+v);
return true;
}
}
}
return false;
}).collect(Collectors.toList());
}在这个样本中,我们找到了由这些顶点给出的三个面:(85,1245,1274),(85,1274,1266)和(351,1476,1479)。
如果我们画出这些面孔,就会看到交叉口:
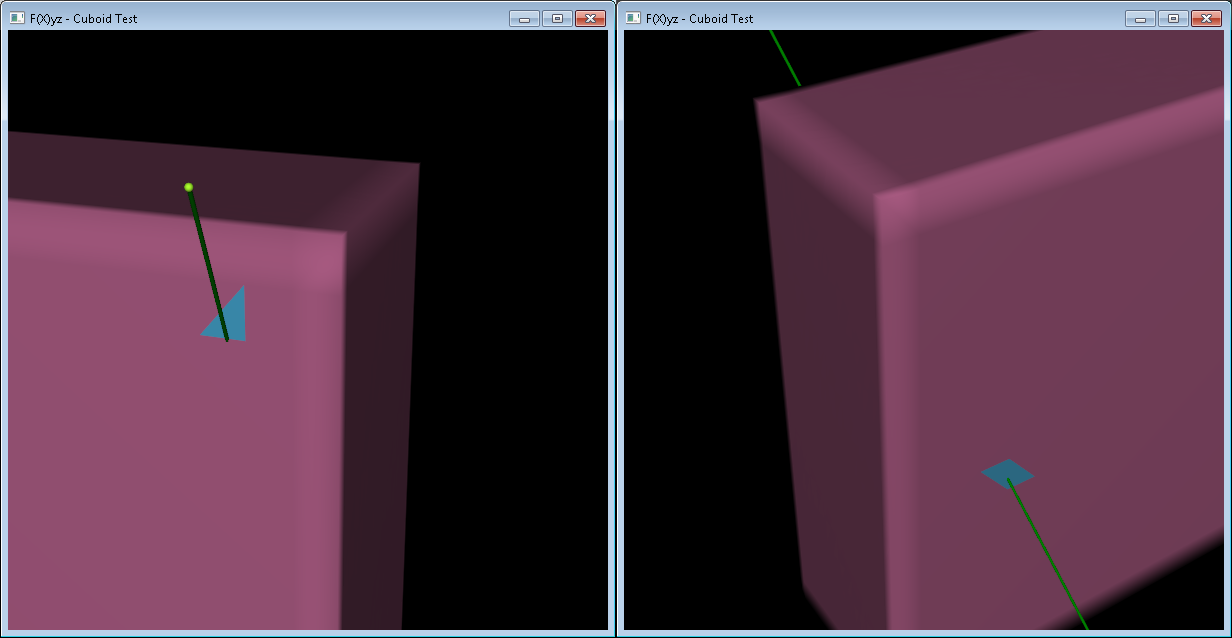
注意,通过在形状的局部坐标系中执行所有操作,我们节省了将每个三角形转换为全局系统的操作。
这个算法非常快。我在不到40毫秒内测试了3M三角形。
这个测试的所有代码都是可用的这里。
Stack Overflow用户
发布于 2014-12-20 23:30:45
好吧,我差点杀了这个,所以我会提供一个非常容易理解的教程。它写得很好,必须承认我也学到了很多东西!
我将把数学留给这篇文章,因为它需要讨论的内容很多(转换点和使用矩阵)。
总结:
射线上的任意点是距离原点的函数。
Ray(t) = Origin + Direction(t)希望这能有所帮助!
编辑:
在Jose的出色示例之后,我冒昧地创建了Ray类,并创建了一个SimpleRayTest示例来显示射线在距离上的路径(将射线看作是投射物)。虽然它不包括三角形交叉口,它应该有助于可视化的射线如何工作。
还可以在Jose提供的库链接中找到资源。
https://stackoverflow.com/questions/27381119
复制相似问题
腾讯云开发者
