
为在opencv中聚在一起的多个闭合行获取单行表示
我检测到图像中的线条,并使用OpenCv C++中的HoughLinesP方法在单独的图像文件中绘制它们。以下是由此产生的图像的一部分。实际上,有数以百计的小线和细线组成一条大的单线。

但是我想要几行代表所有这些行的单行。更近的线应该合并在一起形成一条单线。例如,上面的一组线应该用下面的3条单独的线来表示。
预期的输出如下所示。如何完成这一任务。
到目前为止,取得进展的原因是阿卡尔萨科夫的回答。
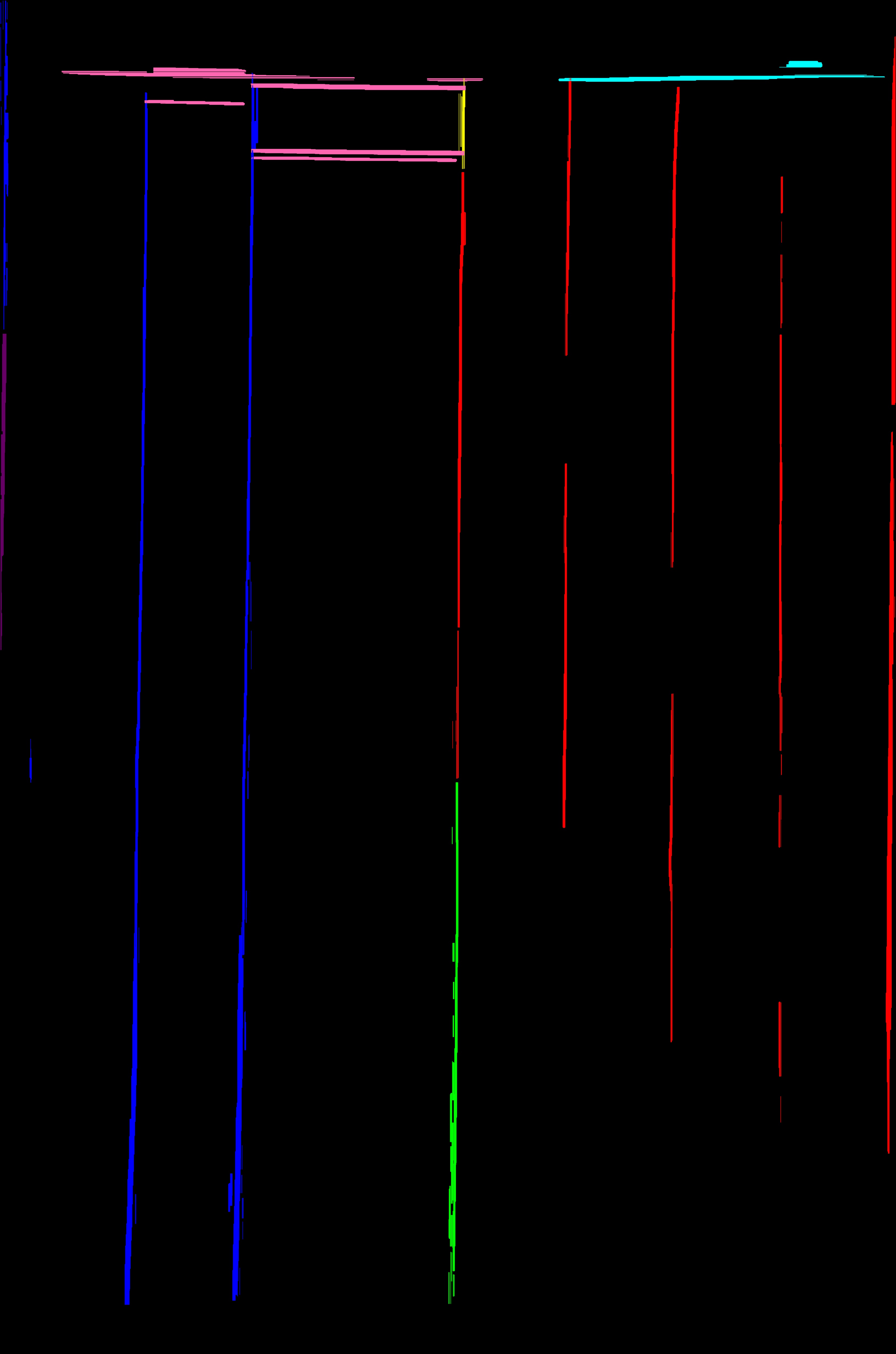
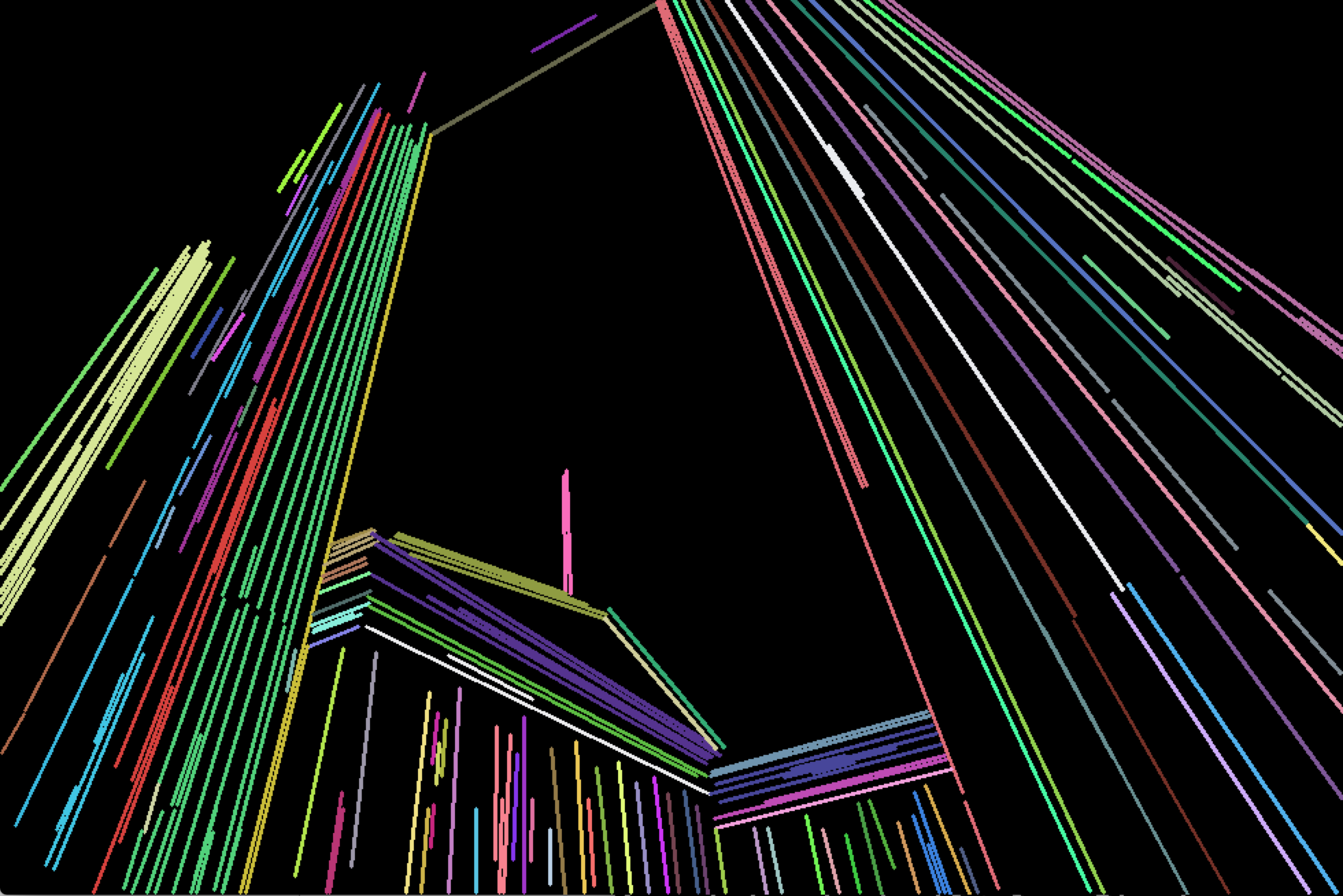
(产生的不同类别的线条以不同的颜色绘制)。请注意,这个结果是我正在处理的原始完整图像,但不是我在问题中使用的示例部分。
回答 6
Stack Overflow用户
发布于 2015-06-17 23:18:56
如果不知道图像中的行数,可以使用cv::partition函数在等效组中拆分行。
我建议你采取以下程序:
- 使用
cv::partition拆分您的行。您需要指定一个好的谓词函数。这实际上取决于从图像中提取的线条,但我认为应该检查以下条件:
- Angle between lines should be quite small (less 3 degrees, for example). Use [dot product](https://en.wikipedia.org/wiki/Dot_product) to calculate angle's cosine.
- Distance between centers of segments should be less than half of maximum length of two segments.
例如,它可以实现如下:
bool isEqual(const Vec4i& _l1, const Vec4i& _l2)
{
Vec4i l1(_l1), l2(_l2);
float length1 = sqrtf((l1[2] - l1[0])*(l1[2] - l1[0]) + (l1[3] - l1[1])*(l1[3] - l1[1]));
float length2 = sqrtf((l2[2] - l2[0])*(l2[2] - l2[0]) + (l2[3] - l2[1])*(l2[3] - l2[1]));
float product = (l1[2] - l1[0])*(l2[2] - l2[0]) + (l1[3] - l1[1])*(l2[3] - l2[1]);
if (fabs(product / (length1 * length2)) < cos(CV_PI / 30))
return false;
float mx1 = (l1[0] + l1[2]) * 0.5f;
float mx2 = (l2[0] + l2[2]) * 0.5f;
float my1 = (l1[1] + l1[3]) * 0.5f;
float my2 = (l2[1] + l2[3]) * 0.5f;
float dist = sqrtf((mx1 - mx2)*(mx1 - mx2) + (my1 - my2)*(my1 - my2));
if (dist > std::max(length1, length2) * 0.5f)
return false;
return true;
}我猜你的台词在vector<Vec4i> lines;里。接下来,您应该按如下方式调用cv::partition:
vector<Vec4i> lines;
std::vector<int> labels;
int numberOfLines = cv::partition(lines, labels, isEqual);您需要调用cv::partition一次,它将对所有行进行聚类。向量labels将存储它所属的集群的每一行标签。参见文档以获取cv::partition
- 当你得到所有的线组后,你应该合并它们。我建议计算组内所有线的平均角度,并估计“边界”点。例如,如果角度为零(即所有线几乎都是水平的),那么它将是最左和最右的点。只需在这几个点之间划一条线。
我注意到您的示例中的所有行都是水平的或垂直的。在这种情况下,您可以计算点,即所有段的中心和“边界”点的平均值,然后通过中心点绘制受“边界”点限制的水平或垂直线。
请注意,cv::partition需要O(N^2)时间,所以如果处理大量的行,可能需要很长时间。
我希望这会有所帮助。我用这种方法来完成类似的任务。
Stack Overflow用户
发布于 2015-06-17 22:49:21
首先,我想指出,您的原始图像是在一个轻微的角度,所以您的预期输出似乎只是有点差。我假设您可以接受那些在输出中不是100%垂直的行,因为它们稍微偏离了您的输入。
Mat image;
Mat binary = image > 125; // Convert to binary image
// Combine similar lines
int size = 3;
Mat element = getStructuringElement( MORPH_ELLIPSE, Size( 2*size + 1, 2*size+1 ), Point( size, size ) );
morphologyEx( mask, mask, MORPH_CLOSE, element );到目前为止,这会产生这样的图像:
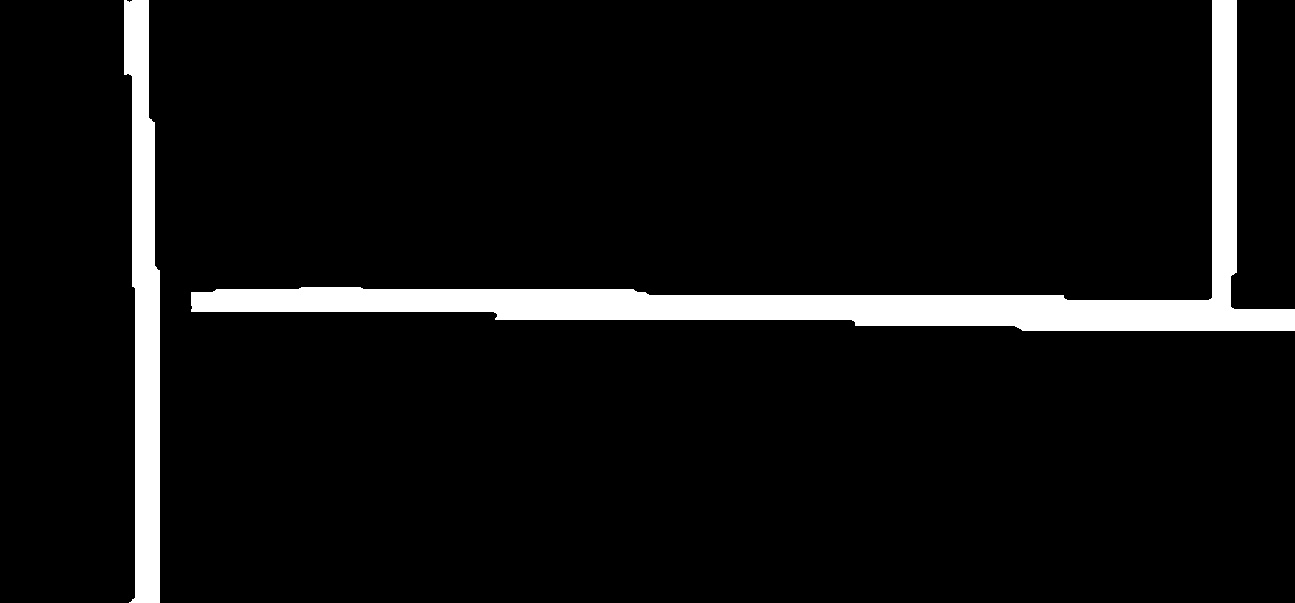
这些线不是在90度的角度,因为原始图像不是。
您还可以选择以下几种方法来缩小线条之间的差距:
Mat out = Mat::zeros(mask.size(), mask.type());
vector<Vec4i> lines;
HoughLinesP(mask, lines, 1, CV_PI/2, 50, 50, 75);
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line( out, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(255), 5, CV_AA);
}
如果这些线条太粗,我已经成功地用:
size = 15;
Mat eroded;
cv::Mat erodeElement = getStructuringElement( MORPH_ELLIPSE, cv::Size( size, size ) );
erode( mask, eroded, erodeElement );

Stack Overflow用户
发布于 2018-07-01 08:02:09
这里是@akarsakov回答的一个精细化的基础。一个基本问题是:
节段中心之间的距离应小于两段最大长度的一半。
在视觉上很远的平行长线可能会在相同的等价类中结束(如OP的编辑所示)。
因此,我认为这一做法对我来说是合理的:
- 在
line1周围构造一个窗口(包围矩形)。 line2角与line1角足够近,line2中至少有一个点在line1的边界矩形内。
通常,图像中一个很弱的长线性特征最终会被一组线段所识别(HoughP,LSD),在它们之间有相当大的差距。为了缓解这一问题,我们的边界矩形围绕着两个方向扩展的直线,其中扩展由原始线宽的一小部分定义。
bool extendedBoundingRectangleLineEquivalence(const Vec4i& _l1, const Vec4i& _l2, float extensionLengthFraction, float maxAngleDiff, float boundingRectangleThickness){
Vec4i l1(_l1), l2(_l2);
// extend lines by percentage of line width
float len1 = sqrtf((l1[2] - l1[0])*(l1[2] - l1[0]) + (l1[3] - l1[1])*(l1[3] - l1[1]));
float len2 = sqrtf((l2[2] - l2[0])*(l2[2] - l2[0]) + (l2[3] - l2[1])*(l2[3] - l2[1]));
Vec4i el1 = extendedLine(l1, len1 * extensionLengthFraction);
Vec4i el2 = extendedLine(l2, len2 * extensionLengthFraction);
// reject the lines that have wide difference in angles
float a1 = atan(linearParameters(el1)[0]);
float a2 = atan(linearParameters(el2)[0]);
if(fabs(a1 - a2) > maxAngleDiff * M_PI / 180.0){
return false;
}
// calculate window around extended line
// at least one point needs to inside extended bounding rectangle of other line,
std::vector<Point2i> lineBoundingContour = boundingRectangleContour(el1, boundingRectangleThickness/2);
return
pointPolygonTest(lineBoundingContour, cv::Point(el2[0], el2[1]), false) == 1 ||
pointPolygonTest(lineBoundingContour, cv::Point(el2[2], el2[3]), false) == 1;
}其中linearParameters, extendedLine, boundingRectangleContour如下:
Vec2d linearParameters(Vec4i line){
Mat a = (Mat_<double>(2, 2) <<
line[0], 1,
line[2], 1);
Mat y = (Mat_<double>(2, 1) <<
line[1],
line[3]);
Vec2d mc; solve(a, y, mc);
return mc;
}
Vec4i extendedLine(Vec4i line, double d){
// oriented left-t-right
Vec4d _line = line[2] - line[0] < 0 ? Vec4d(line[2], line[3], line[0], line[1]) : Vec4d(line[0], line[1], line[2], line[3]);
double m = linearParameters(_line)[0];
// solution of pythagorean theorem and m = yd/xd
double xd = sqrt(d * d / (m * m + 1));
double yd = xd * m;
return Vec4d(_line[0] - xd, _line[1] - yd , _line[2] + xd, _line[3] + yd);
}
std::vector<Point2i> boundingRectangleContour(Vec4i line, float d){
// finds coordinates of perpendicular lines with length d in both line points
// https://math.stackexchange.com/a/2043065/183923
Vec2f mc = linearParameters(line);
float m = mc[0];
float factor = sqrtf(
(d * d) / (1 + (1 / (m * m)))
);
float x3, y3, x4, y4, x5, y5, x6, y6;
// special case(vertical perpendicular line) when -1/m -> -infinity
if(m == 0){
x3 = line[0]; y3 = line[1] + d;
x4 = line[0]; y4 = line[1] - d;
x5 = line[2]; y5 = line[3] + d;
x6 = line[2]; y6 = line[3] - d;
} else {
// slope of perpendicular lines
float m_per = - 1/m;
// y1 = m_per * x1 + c_per
float c_per1 = line[1] - m_per * line[0];
float c_per2 = line[3] - m_per * line[2];
// coordinates of perpendicular lines
x3 = line[0] + factor; y3 = m_per * x3 + c_per1;
x4 = line[0] - factor; y4 = m_per * x4 + c_per1;
x5 = line[2] + factor; y5 = m_per * x5 + c_per2;
x6 = line[2] - factor; y6 = m_per * x6 + c_per2;
}
return std::vector<Point2i> {
Point2i(x3, y3),
Point2i(x4, y4),
Point2i(x6, y6),
Point2i(x5, y5)
};
}打电话给:
std::vector<int> labels;
int equilavenceClassesCount = cv::partition(linesWithoutSmall, labels, [](const Vec4i l1, const Vec4i l2){
return extendedBoundingRectangleLineEquivalence(
l1, l2,
// line extension length - as fraction of original line width
0.2,
// maximum allowed angle difference for lines to be considered in same equivalence class
2.0,
// thickness of bounding rectangle around each line
10);
});现在,为了将每个等价类缩减为单行,我们从它构建了一个点云,并找到了一条适合的线:
// fit line to each equivalence class point cloud
std::vector<Vec4i> reducedLines = std::accumulate(pointClouds.begin(), pointClouds.end(), std::vector<Vec4i>{}, [](std::vector<Vec4i> target, const std::vector<Point2i>& _pointCloud){
std::vector<Point2i> pointCloud = _pointCloud;
//lineParams: [vx,vy, x0,y0]: (normalized vector, point on our contour)
// (x,y) = (x0,y0) + t*(vx,vy), t -> (-inf; inf)
Vec4f lineParams; fitLine(pointCloud, lineParams, CV_DIST_L2, 0, 0.01, 0.01);
// derive the bounding xs of point cloud
decltype(pointCloud)::iterator minXP, maxXP;
std::tie(minXP, maxXP) = std::minmax_element(pointCloud.begin(), pointCloud.end(), [](const Point2i& p1, const Point2i& p2){ return p1.x < p2.x; });
// derive y coords of fitted line
float m = lineParams[1] / lineParams[0];
int y1 = ((minXP->x - lineParams[2]) * m) + lineParams[3];
int y2 = ((maxXP->x - lineParams[2]) * m) + lineParams[3];
target.push_back(Vec4i(minXP->x, y1, maxXP->x, y2));
return target;
});示范:

检测到的分隔行(小行过滤掉):
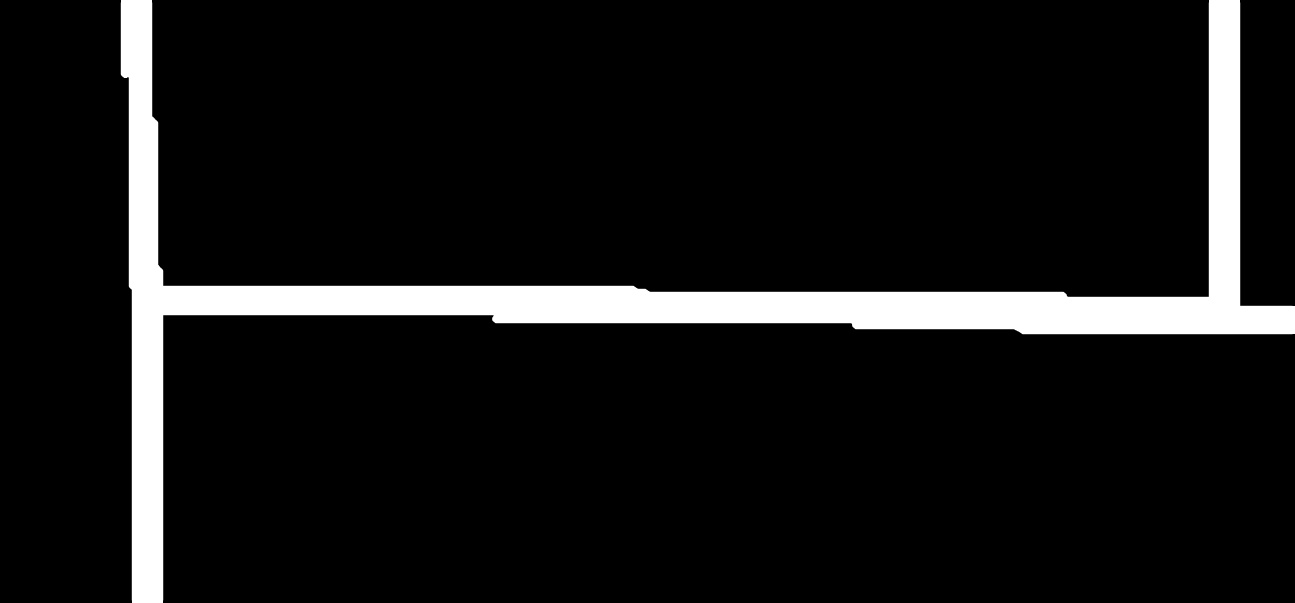
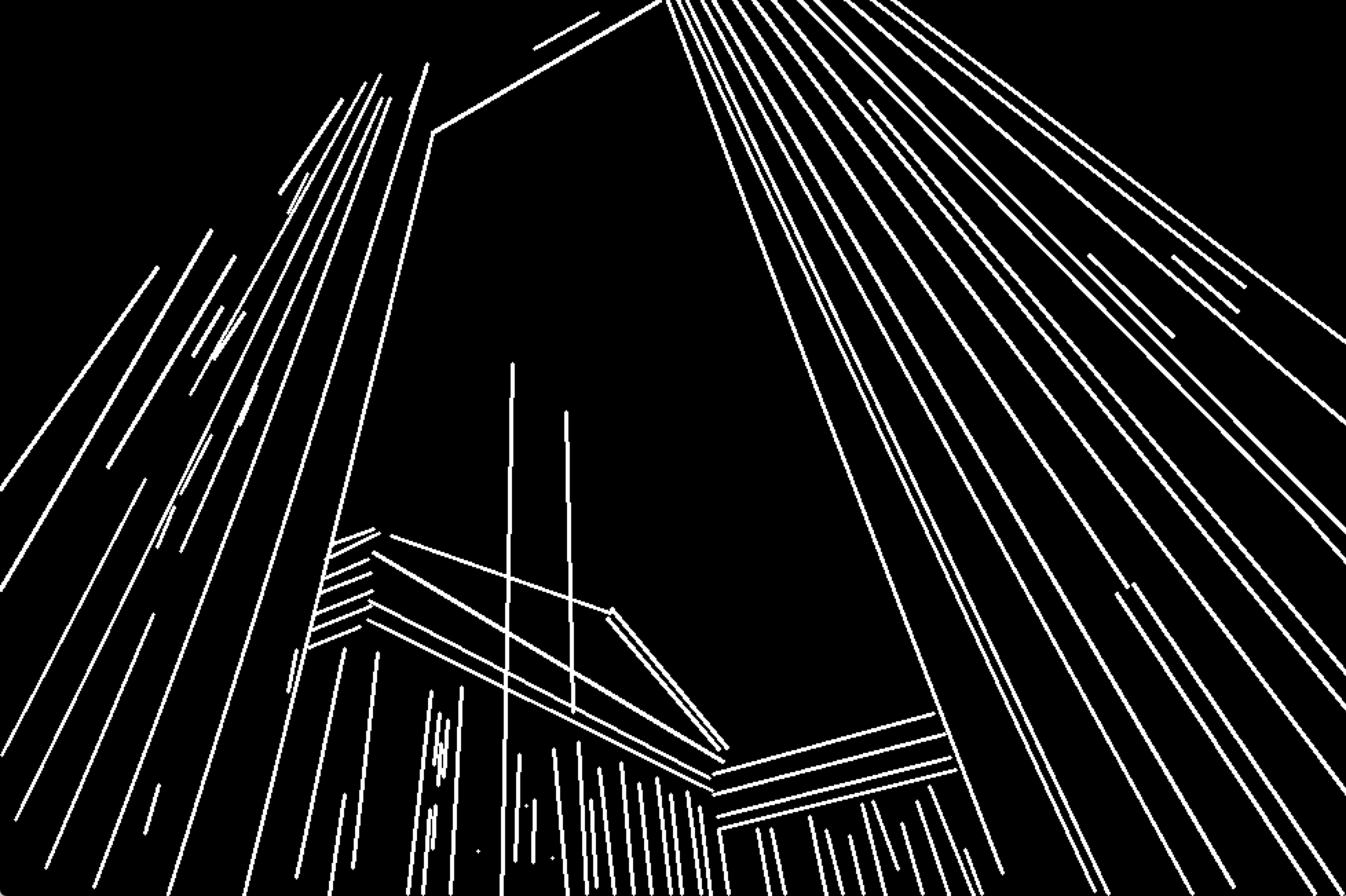
减少:
示范代码:
int main(int argc, const char* argv[]){
if(argc < 2){
std::cout << "img filepath should be present in args" << std::endl;
}
Mat image = imread(argv[1]);
Mat smallerImage; resize(image, smallerImage, cv::Size(), 0.5, 0.5, INTER_CUBIC);
Mat target = smallerImage.clone();
namedWindow("Detected Lines", WINDOW_NORMAL);
namedWindow("Reduced Lines", WINDOW_NORMAL);
Mat detectedLinesImg = Mat::zeros(target.rows, target.cols, CV_8UC3);
Mat reducedLinesImg = detectedLinesImg.clone();
// delect lines in any reasonable way
Mat grayscale; cvtColor(target, grayscale, CV_BGRA2GRAY);
Ptr<LineSegmentDetector> detector = createLineSegmentDetector(LSD_REFINE_NONE);
std::vector<Vec4i> lines; detector->detect(grayscale, lines);
// remove small lines
std::vector<Vec4i> linesWithoutSmall;
std::copy_if (lines.begin(), lines.end(), std::back_inserter(linesWithoutSmall), [](Vec4f line){
float length = sqrtf((line[2] - line[0]) * (line[2] - line[0])
+ (line[3] - line[1]) * (line[3] - line[1]));
return length > 30;
});
std::cout << "Detected: " << linesWithoutSmall.size() << std::endl;
// partition via our partitioning function
std::vector<int> labels;
int equilavenceClassesCount = cv::partition(linesWithoutSmall, labels, [](const Vec4i l1, const Vec4i l2){
return extendedBoundingRectangleLineEquivalence(
l1, l2,
// line extension length - as fraction of original line width
0.2,
// maximum allowed angle difference for lines to be considered in same equivalence class
2.0,
// thickness of bounding rectangle around each line
10);
});
std::cout << "Equivalence classes: " << equilavenceClassesCount << std::endl;
// grab a random colour for each equivalence class
RNG rng(215526);
std::vector<Scalar> colors(equilavenceClassesCount);
for (int i = 0; i < equilavenceClassesCount; i++){
colors[i] = Scalar(rng.uniform(30,255), rng.uniform(30, 255), rng.uniform(30, 255));;
}
// draw original detected lines
for (int i = 0; i < linesWithoutSmall.size(); i++){
Vec4i& detectedLine = linesWithoutSmall[i];
line(detectedLinesImg,
cv::Point(detectedLine[0], detectedLine[1]),
cv::Point(detectedLine[2], detectedLine[3]), colors[labels[i]], 2);
}
// build point clouds out of each equivalence classes
std::vector<std::vector<Point2i>> pointClouds(equilavenceClassesCount);
for (int i = 0; i < linesWithoutSmall.size(); i++){
Vec4i& detectedLine = linesWithoutSmall[i];
pointClouds[labels[i]].push_back(Point2i(detectedLine[0], detectedLine[1]));
pointClouds[labels[i]].push_back(Point2i(detectedLine[2], detectedLine[3]));
}
// fit line to each equivalence class point cloud
std::vector<Vec4i> reducedLines = std::accumulate(pointClouds.begin(), pointClouds.end(), std::vector<Vec4i>{}, [](std::vector<Vec4i> target, const std::vector<Point2i>& _pointCloud){
std::vector<Point2i> pointCloud = _pointCloud;
//lineParams: [vx,vy, x0,y0]: (normalized vector, point on our contour)
// (x,y) = (x0,y0) + t*(vx,vy), t -> (-inf; inf)
Vec4f lineParams; fitLine(pointCloud, lineParams, CV_DIST_L2, 0, 0.01, 0.01);
// derive the bounding xs of point cloud
decltype(pointCloud)::iterator minXP, maxXP;
std::tie(minXP, maxXP) = std::minmax_element(pointCloud.begin(), pointCloud.end(), [](const Point2i& p1, const Point2i& p2){ return p1.x < p2.x; });
// derive y coords of fitted line
float m = lineParams[1] / lineParams[0];
int y1 = ((minXP->x - lineParams[2]) * m) + lineParams[3];
int y2 = ((maxXP->x - lineParams[2]) * m) + lineParams[3];
target.push_back(Vec4i(minXP->x, y1, maxXP->x, y2));
return target;
});
for(Vec4i reduced: reducedLines){
line(reducedLinesImg, Point(reduced[0], reduced[1]), Point(reduced[2], reduced[3]), Scalar(255, 255, 255), 2);
}
imshow("Detected Lines", detectedLinesImg);
imshow("Reduced Lines", reducedLinesImg);
waitKey();
return 0;
}https://stackoverflow.com/questions/30746327
复制相似问题
腾讯云开发者
