
右手欧拉角XYZ到左撇子欧拉角XYZ
右手欧拉角XYZ到左撇子欧拉角XYZ
提问于 2015-07-02 18:13:46
我相信这是简单的,但没有任何成功的研究,并得到了一个成功的答案。
我把旋转定义为三个欧拉角,按XYZ顺序,右撇子.
我必须转换为一个左撇子系统的欧拉XYZ。我如何调整这些角度,以正确的左手系统?
此外,如果有人有任何样本,所以我可以确保正确的做法,如什么是90 -45 160或90 40 30去。
回答 1
Stack Overflow用户
回答已采纳
发布于 2015-07-03 19:32:51
记数法:
x,y,z - old system basis
x',y',z' - new system basis
Transformation between systems:
x' = x
y' = y
z' = -z
Euler angles:
EulerXYZ = (alfa,beta,gamma)
EulerXYZ' = (alfa',beta',gamma') = ?现在我想出两种方法来解决这个问题:
图形化
- 绘制这两种系统
- 使用右手规则在右撇子上标记正旋转。
- 用左手规则在左撇子上做正旋转。
- 当相应轴上的旋转一致时,则转换为
angle' = angle,否则为angle' = -angle。
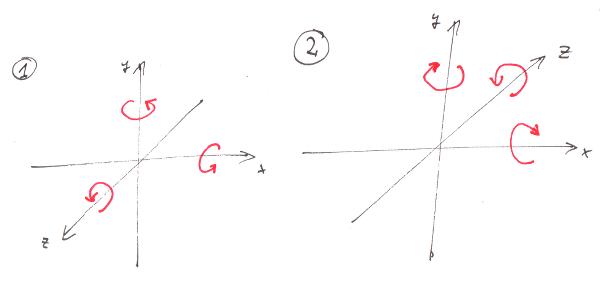
在上面的图片中,#1是右撇子,#2是左手系统(红线总是经过黑线)。
看看这张照片,我们可以得出结论:alfa',beta',gamma' = -alfa,-beta,+gamma
代数法
转换可以用几何代数来计算。它在某种程度上类似于四元数,但旋转发生在“定向平面”,而不是“圆轴”。
有向平面是由两个向量u^v的乘积定义的,具有以下性质:-(u^v) = (-u)^v = u^(-v)
旋转由转子R(angle, plane)和R(angle, -plane) = R(-angle, plane)定义。
现在:
R(alfa, y^z) = R(-alfa, -(y^z)) = R(-alfa, y^(-z)) = R(-alfa, y'^z')
R(beta, x^z) = R(-beta, x'^z')
R(gamma, x^y) = R(+gamma, x'^y')所以
alfa',beta',gamma' = -alfa,-beta,+gamma页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/31191752
复制相关文章
相似问题
腾讯云开发者
