
用Open改变照片中的幻灯片
用Open改变照片中的幻灯片
提问于 2015-09-22 12:58:29
如何使用或合适的图像处理工具更改幻灯片以使自动生成更好的OpenCV?我想它需要检测投影仪,自动对比颜色,透视变形它才能变得更好。
我使用photoshop来手动转换
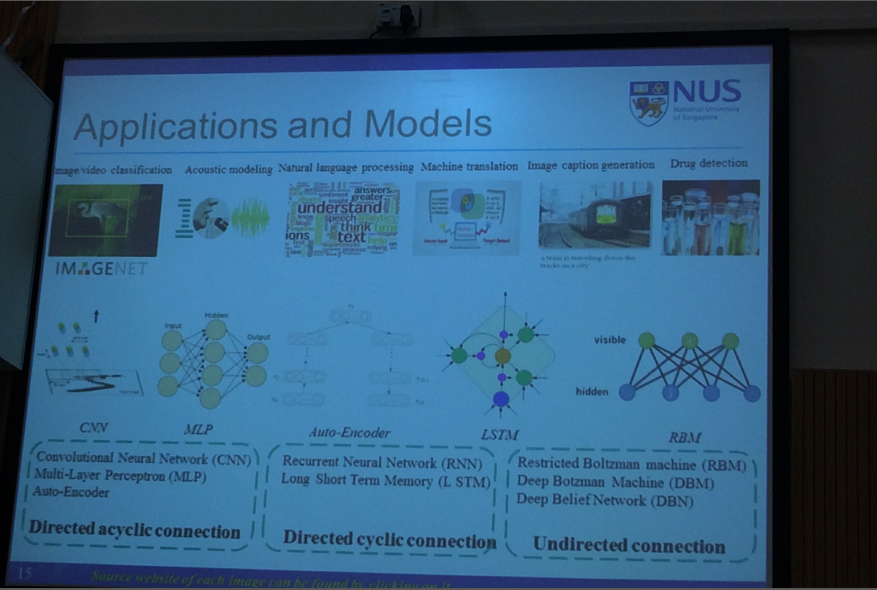
至
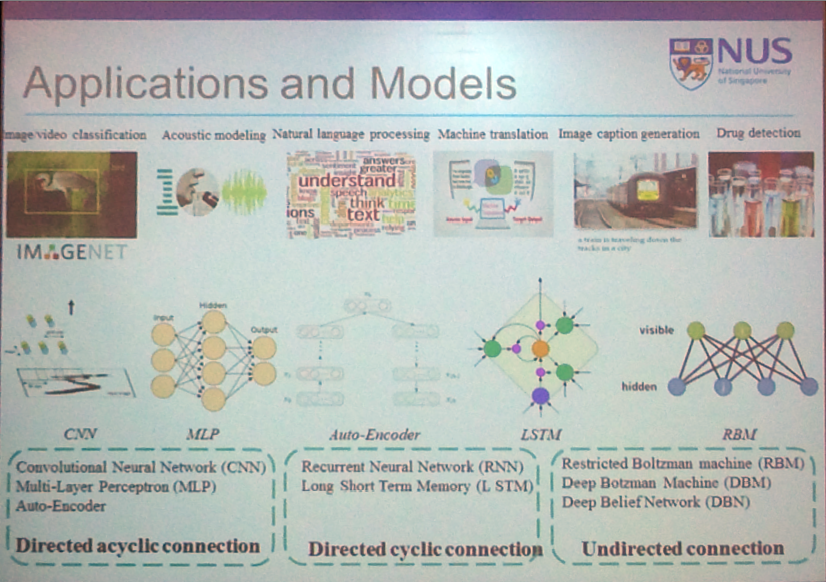
通过使用1)自动对比度2) Photoshop中的透视翘曲
回答 1
Stack Overflow用户
回答已采纳
发布于 2015-09-27 11:24:58
您可以:
1)将HSV图像阈值设置在几乎蓝色的颜色上,以获得海报掩码:
2)找出外线及其交汇处:
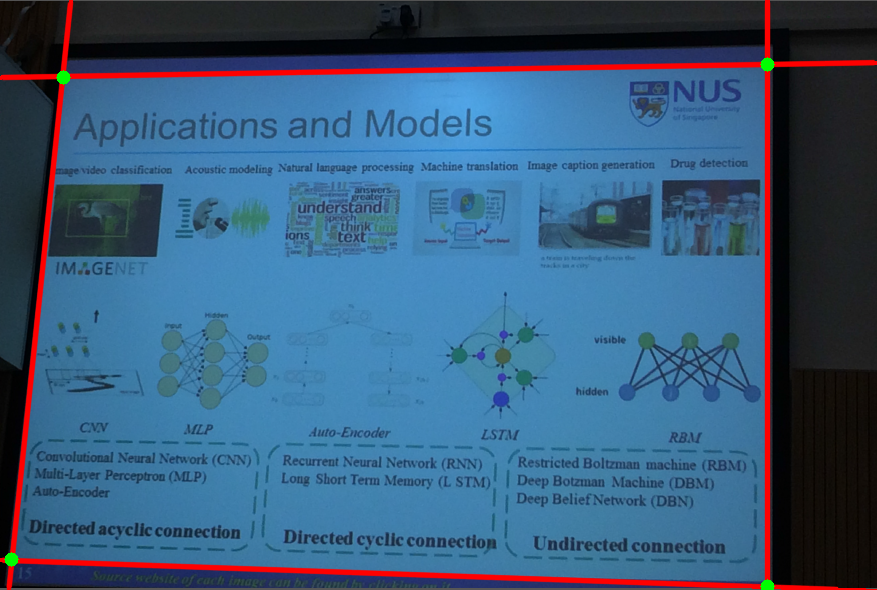
3)采用透视变换:
4)进行颜色增强。这里我使用了相当于Matlab的不调整。有关在这里中的移植,请参见OpenCV。
这是完整的密码。评论意见应澄清每一步。如果有什么不清楚的地方请告诉我。
#include <opencv2\opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void imadjust(const Mat1b& src, Mat1b& dst, int tol = 1, Vec2i in = Vec2i(0, 255), Vec2i out = Vec2i(0, 255))
{
// src : input CV_8UC1 image
// dst : output CV_8UC1 imge
// tol : tolerance, from 0 to 100.
// in : src image bounds
// out : dst image buonds
dst = src.clone();
tol = max(0, min(100, tol));
if (tol > 0)
{
// Compute in and out limits
// Histogram
vector<int> hist(256, 0);
for (int r = 0; r < src.rows; ++r) {
for (int c = 0; c < src.cols; ++c) {
hist[src(r, c)]++;
}
}
// Cumulative histogram
vector<int> cum = hist;
for (int i = 1; i < hist.size(); ++i) {
cum[i] = cum[i - 1] + hist[i];
}
// Compute bounds
int total = src.rows * src.cols;
int low_bound = total * tol / 100;
int upp_bound = total * (100 - tol) / 100;
in[0] = distance(cum.begin(), lower_bound(cum.begin(), cum.end(), low_bound));
in[1] = distance(cum.begin(), lower_bound(cum.begin(), cum.end(), upp_bound));
}
// Stretching
float scale = float(out[1] - out[0]) / float(in[1] - in[0]);
for (int r = 0; r < dst.rows; ++r)
{
for (int c = 0; c < dst.cols; ++c)
{
int vs = max(src(r, c) - in[0], 0);
int vd = min(int(vs * scale + 0.5f) + out[0], out[1]);
dst(r, c) = saturate_cast<uchar>(vd);
}
}
}
int main()
{
// Load image
Mat3b img = imread("path_to_image");
Mat3b dbg = img.clone(); // Debug image
// Convert to HSV
Mat3b hsv;
cvtColor(img, hsv, COLOR_BGR2HSV);
// Threshold on HSV values
Mat1b mask;
inRange(hsv, Scalar(100, 140, 120), Scalar(110, 170, 200), mask);
// Get the external boundaries
Mat1b top(mask.rows, mask.cols, uchar(0));
Mat1b bottom(mask.rows, mask.cols, uchar(0));
Mat1b left(mask.rows, mask.cols, uchar(0));
Mat1b right(mask.rows, mask.cols, uchar(0));
for (int r = 0; r < mask.rows; ++r)
{
// Find first in row
for (int c = 0; c < mask.cols; ++c)
{
if (mask(r, c))
{
left(r, c) = 255;
break;
}
}
// Find last in row
for (int c = mask.cols - 1; c >= 0; --c)
{
if (mask(r, c))
{
right(r, c) = 255;
break;
}
}
}
for (int c = 0; c < mask.cols; ++c)
{
// Find first in col
for (int r = 0; r < mask.rows; ++r)
{
if (mask(r, c))
{
top(r, c) = 255;
break;
}
}
// Find last in col
for (int r = mask.rows - 1; r >= 0; --r)
{
if (mask(r, c))
{
bottom(r, c) = 255;
break;
}
}
}
// Find lines
vector<Vec2f> linesTop, linesBottom, linesLeft, linesRight;
HoughLines(top, linesTop, 1, CV_PI / 180.0, 100);
HoughLines(bottom, linesBottom, 1, CV_PI / 180.0, 100);
HoughLines(left, linesLeft, 1, CV_PI / 180.0, 100);
HoughLines(right, linesRight, 1, CV_PI / 180.0, 100);
// Find intersections
Mat1b maskLines(mask.rows, mask.cols, uchar(0));
if (linesTop.empty() || linesBottom.empty() || linesLeft.empty() || linesRight.empty())
{
cout << "No enough lines detected" << endl;
return -1;
}
// Keep only the first line detected for each side
vector<Vec2f> lines{ linesTop[0], linesBottom[0], linesLeft[0], linesRight[0] };
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
// Get 2 points on each line
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
// Draw lines
Mat1b maskCurrentLine(mask.rows, mask.cols, uchar(0));
line(maskCurrentLine, pt1, pt2, Scalar(1), 1);
maskLines += maskCurrentLine;
line(dbg, pt1, pt2, Scalar(0, 0, 255), 3, CV_AA);
}
// Keep only intersections
maskLines = maskLines > 1;
// Get ordered set of vertices
vector<Point2f> vertices;
// Top left
Mat1b tl(maskLines(Rect(0, 0, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < tl.rows; ++r)
{
for (int c = 0; c < tl.cols; ++c)
{
if (tl(r, c))
{
vertices.push_back(Point2f(c, r));
}
}
}
// Top right
Mat1b tr(maskLines(Rect(mask.cols / 2, 0, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < tr.rows; ++r)
{
for (int c = 0; c < tr.cols; ++c)
{
if (tr(r, c))
{
vertices.push_back(Point2f(mask.cols / 2 + c, r));
}
}
}
// Bottom right
Mat1b br(maskLines(Rect(mask.cols / 2, mask.rows / 2, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < br.rows; ++r)
{
for (int c = 0; c < br.cols; ++c)
{
if (br(r, c))
{
vertices.push_back(Point2f(mask.cols / 2 + c, mask.rows / 2 + r));
}
}
}
// Bottom left
Mat1b bl(maskLines(Rect(0, mask.rows / 2, mask.cols / 2, mask.rows / 2)));
for (int r = 0; r < bl.rows; ++r)
{
for (int c = 0; c < bl.cols; ++c)
{
if (bl(r, c))
{
vertices.push_back(Point2f(c, mask.rows / 2 + r));
}
}
}
// Draw vertices
for (int i = 0; i < vertices.size(); ++i)
{
circle(dbg, vertices[i], 7, Scalar(0,255,0), CV_FILLED);
}
// Init output image
Mat3b result(img.rows, img.cols, Vec3b(0, 0, 0));
// Output vertices
vector<Point2f> verticesOut = { Point2f(0, 0), Point2f(img.cols, 0), Point2f(img.cols, img.rows), Point2f(0, img.rows) };
// Get transformation
Mat M = getPerspectiveTransform(vertices, verticesOut);
warpPerspective(img, result, M, result.size());
// Imadjust
vector<Mat1b> planes;
split(result, planes);
for (int i = 0; i < planes.size(); ++i)
{
imadjust(planes[i], planes[i]);
}
Mat3b adjusted;
merge(planes, adjusted);
imshow("Result", result);
imshow("Adjusted", adjusted);
waitKey();
return 0;
}页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/32717546
复制相关文章
相似问题
腾讯云开发者
