
摄像机跟踪目标;PID控制;鹦鹉AR无人机2
我正在做一个项目,在那里我应该实现目标跟踪技术,使用鹦鹉AR无人机2.0摄像头。因此,主要的想法是,无人机应该能够识别特定的颜色,然后通过保持一定距离来跟踪它。
我正在使用opencv API建立与无人机的通信。这个API提供了以下功能:
ARDrone::move3D(double vx, double vy, double vz, double vr)在3D空间中移动AR.Drone的位置
- vx: X速度m/s
- Y速度m/s
- vz: Z速度m/s
- vr:转速rad/s
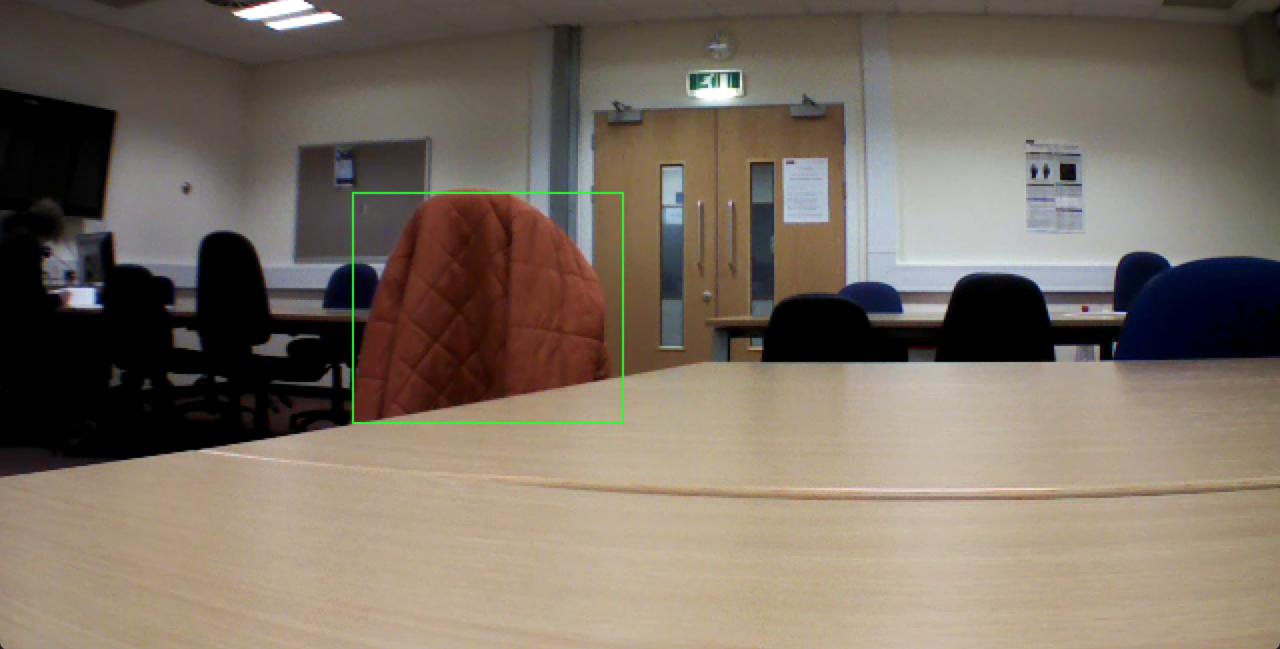
我已经编写了一个应用程序,它使用OpenCV对从无人机摄像机获得的图像进行简单的图像处理,并找到需要跟踪的物体轮廓。见下面的例子:
现在,,我正在挣扎的部分,正在寻找一种技术,我应该使用它来找到要发送到move3D函数的速度。我读过,常用的控制方法是使用PID控制。然而,我读过这方面的文章,却不明白它与这个问题有何关系。
总之,我的问题是如何将机器人移向摄像机中检测到的物体?如何从摄像机中找到特定物体的坐标?
回答 1
Stack Overflow用户
发布于 2016-01-23 01:11:33
编辑:
所以,我刚刚意识到你使用的是无人机和你的坐标系统WRT无人机很可能是x前进到图像,y的左边图像(图像列),z向上垂直(图像行)。我的答案是坐标WRT相机x=列,y=行,z=深度(进入图像),记住,当你阅读我的大纲。而且,我写的所有东西都是psuedo代码,如果没有很多修改,它就不会运行。
原始邮政
PID控制器是一种比例积分微分控制器.它根据您的特定错误确定操作顺序。
对于您的问题,让我们假设最优跟踪意味着矩形在图像的中心,它占据了30%的像素空间。这意味着你移动你的相机/机器人,直到满足这些条件。我们将把这些目标参数称为
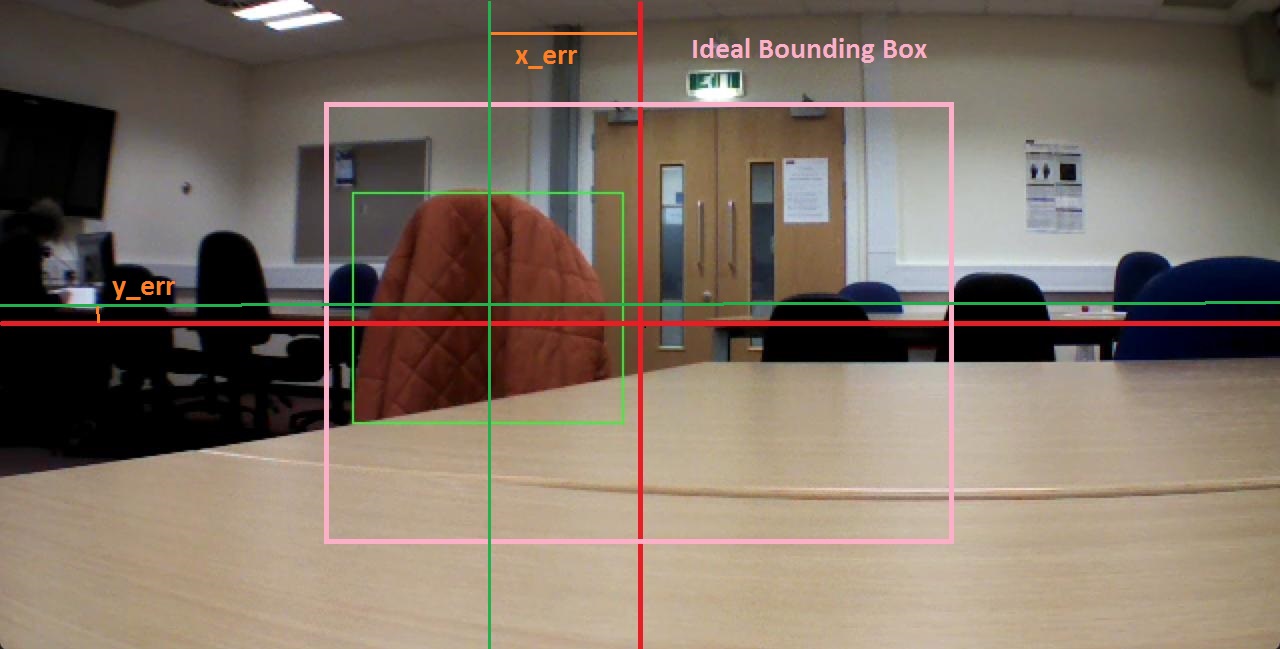
x_ideal = image_width / 2
y_ideal = image_height / 2
area_ideal = image_width * image_height * 0.3现在,假设您的边界框有4个参数。
(x_bounding, y_bounding, width_bounding_box, height_bounding_box)您的错误可能是这样的:
x_err = x_bounding - x_ideal;
y_err = y_bounding - y_ideal;
z_err = area_ideal - (width_bounding_box * height_bounding_box)注意,我已经将z距离(深度)与对象的大小联系起来。这假设被跟踪的对象是刚性的,不会改变大小。任何尺寸的变化都是由于物体与相机的距离(较大的包围框表示物体接近,小的表示物体很远)。这是一个估计,但没有任何参数的相机或物体本身,我们只能做这些一般性的陈述。
在创建控制序列时,我们需要记住这个符号,这就是为什么在执行减法时顺序很重要的原因。让我们从逻辑上考虑这一点。x_err确定边框离所需位置的水平距离。在我们的例子中,这应该是正的,这意味着机器人应该向左移动,这样对象就会更接近图像的中心。盒子太小了,意味着物体太远了,等等。
z_err <0:意味着bot太近,需要减速,Vz应该减少 z_err =0:保持速度命令不变,不做任何更改 z_err >0:我们需要靠近,Vz应该增加x_err <0:意味着bot在右边,需要左转(减少x),Vx应该减少 x_err =0:在X中保持速度不变,不改变Vx x_err >0:意思是bot在左边,需要向右转(增加x),Vx应该增加
我们可以对每个y轴做同样的事情。现在,我们使用这个错误为bot创建一个命令序列。
这种描述听起来很像PID控制器。观察一个状态,找出一个错误,创建一个控制序列来减少错误,然后一遍又一遍地重复这个过程。在您的情况下,速度将是您的算法输出的动作。实际上,您将有3个PID运行。
- X PID
- Y型PID
- Z PID
由于它们本质上是正交的,我们可以说每个系统是独立的(理想情况下是这样),向x方向移动不应该影响Y方向。这个例子也完全忽略了轴承信息(Vr),但是它只是一个思想练习,而不是一个完整的解决方案
校正的精确速度是由PID系数决定的,这是事情变得有点棘手的地方。这里是一个易于阅读(几乎没有数学)概述或PID控制。通过一些实验,您将不得不使用您的系统(也称为“调整”您的参数)。这变得更加困难,因为相机不是一个完整的3d传感器,所以我们无法从环境中提取真正的测量值。在不了解传感器/环境的更多信息的情况下,很难将~30 pixels的错误转换为m/s,但我希望这给了您一个关于如何继续进行的总体想法。
https://stackoverflow.com/questions/34713594
复制相似问题
腾讯云开发者
