
如何利用emgu cv在图像中找到具有任意旋转角的黑色方格
如何利用emgu cv在图像中找到具有任意旋转角的黑色方格
提问于 2016-02-07 07:39:00
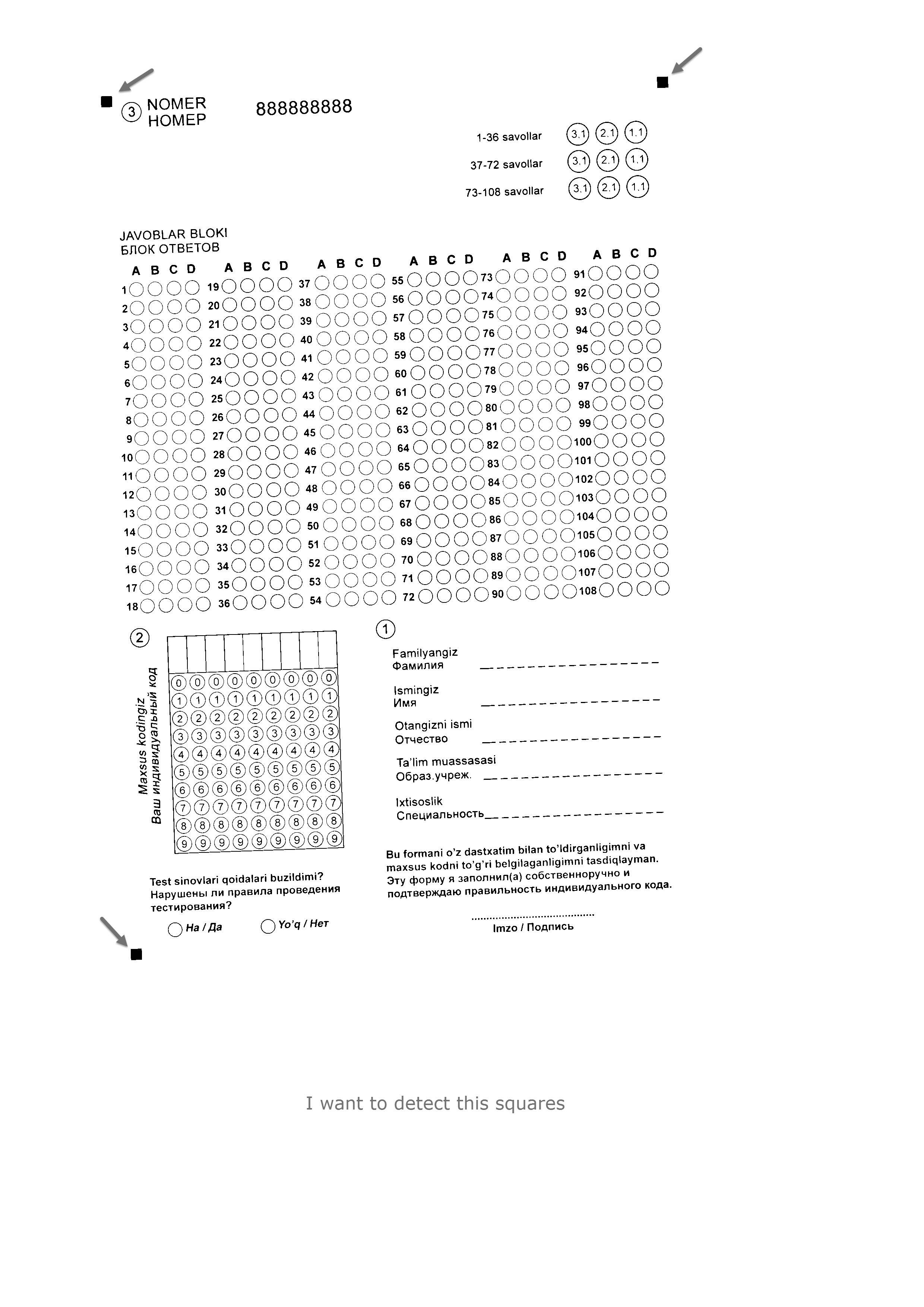
我需要在测试表格中找到三个黑色方块的坐标。我从站点emgu.com中获取了示例代码,并稍微修改了它,但他没有找到我需要的东西。图像的大小为A4,测试表单的大小为A5。我希望能得到你的帮助:)我差点忘了,方格的大小是30个像素。
private void DetectRectangles(Image<Gray, byte> img)
{
var size = new Size(3, 3);
CvInvoke.GaussianBlur(img, img, size, 0);
CvInvoke.AdaptiveThreshold(img, img, 255, AdaptiveThresholdType.MeanC, ThresholdType.Binary, 75, 100);
UMat cannyEdges = new UMat();
CvInvoke.Canny(img, cannyEdges, 180, 120);
var boxList = new List<RotatedRect>();
using (VectorOfVectorOfPoint contours = new VectorOfVectorOfPoint())
{
CvInvoke.FindContours(cannyEdges, contours, null, RetrType.Tree, ChainApproxMethod.ChainApproxSimple);
int count = contours.Size;
for (int i = 0; i < count; i++)
{
using (VectorOfPoint contour = contours[i])
using (VectorOfPoint approxContour = new VectorOfPoint())
{
CvInvoke.ApproxPolyDP(contour, approxContour, CvInvoke.ArcLength(contour, true) * 0.05, true);
var area = CvInvoke.ContourArea(approxContour);
if (area > 800 && area < 1000)
{
if (approxContour.Size == 4)
{
bool isRectangle = true;
Point[] pts = approxContour.ToArray();
LineSegment2D[] edges = PointCollection.PolyLine(pts, true);
for (int j = 0; j < edges.Length; j++)
{
double angle = Math.Abs(edges[(j + 1) % edges.Length].GetExteriorAngleDegree(edges[j]));
if (angle < 75 || angle > 94)
{
isRectangle = false;
break;
}
}
if (isRectangle)
boxList.Add(CvInvoke.MinAreaRect(approxContour));
}
}
}
}
}
var resultimg = new Image<Bgr,byte>(img.Width, img.Height);
CvInvoke.CvtColor(img, resultimg, ColorConversion.Gray2Bgr);
foreach (RotatedRect box in boxList)
{
CvInvoke.Polylines(resultimg, Array.ConvertAll(box.GetVertices(), Point.Round), true, new Bgr(Color.Red).MCvScalar, 2);
}
imageBox1.Image = resultimg;
resultimg.Save("result_img.jpg"); }输入图像:
回答 1
Stack Overflow用户
回答已采纳
发布于 2016-02-07 08:33:04
由于您正在寻找一个非常特定的对象,因此可以使用以下算法:
- 反转图像,使前景变为白色,背景变为黑色。
- 寻找连通部件的轮廓
- 每个等高线
a.计算最小面积矩形
box。 b.计算box:barea的面积 计算等高线的面积:carea应用一些约束,确保你的轮廓是你要寻找的正方形。
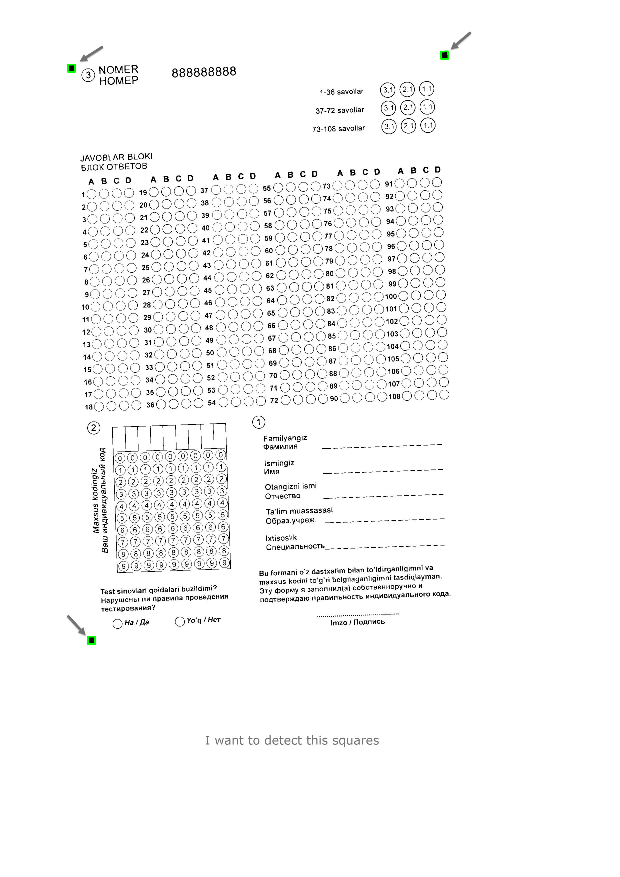
步骤3d的约束条件如下:
barea / carea的比率应该很高(比方说高于0.9),这意味着等高线属于一个几乎是矩形的圆点。box的纵横比应该接近1,这意味着box基本上是一个正方形。- 平方的大小应该是几乎
30,以拒绝其他更小或更大的方块在图像中。
我运行的结果是:
这是密码。对不起,它是C++,但是由于它都是OpenCV函数调用,所以您应该能够轻松地将其移植到C#。至少,您可以将其用作引用:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
// Load image
Mat1b img = imread("path_to_image", IMREAD_GRAYSCALE);
// Create the output image
Mat3b out;
cvtColor(img, out, COLOR_GRAY2BGR);
// Create debug image
Mat3b dbg = out.clone();
// Binarize (to remove jpeg arifacts)
img = img > 200;
// Invert image
img = ~img;
// Find connected components
vector<vector<Point>> contours;
findContours(img.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
vector<RotatedRect> squares;
// For each contour
for (int i = 0; i < contours.size(); ++i)
{
// Find rotated bounding box
RotatedRect box = minAreaRect(contours[i]);
// Compute the area of the contour
double carea = contourArea(contours[i]);
// Compute the area of the box
double barea = box.size.area();
// Constraint #1
if ((carea / barea) > 0.9)
{
drawContours(dbg, contours, i, Scalar(0, 0, 255), 7);
// Constraint #2
if (min(box.size.height, box.size.width) / max(box.size.height, box.size.width) > 0.95)
{
drawContours(dbg, contours, i, Scalar(255, 0, 0), 5);
// Constraint #3
if (box.size.width > 25 && box.size.width < 35)
{
drawContours(dbg, contours, i, Scalar(0, 255, 0), 3);
// Found the square!
squares.push_back(box);
}
}
}
// Draw output
for (int i = 0; i < squares.size(); ++i)
{
Point2f pts[4];
squares[i].points(pts);
for (int j = 0; j < 4; ++j)
{
line(out, pts[j], pts[(j + 1) % 4], Scalar(0,255,0), 5);
}
}
}
// Resize for better visualization
resize(out, out, Size(), 0.25, 0.25);
resize(dbg, dbg, Size(), 0.25, 0.25);
// Show images
imshow("Steps", dbg);
imshow("Result", out);
waitKey();
return 0;
}页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/35250994
复制相关文章
相似问题
腾讯云开发者
