
凸多面体(方金字塔)内三维点的检测算法
我正在寻找健壮的碰撞检测算法,并发现了一本很棒的书,名为“实时碰撞检测”,作者是克里斯特·埃里克森。我试图使用一种特定的算法来检查给定的点是否在凸多面体内(在三维空间中,这些是方形的金字塔、立方体和四面体(也就是所有边都是三角形的金字塔)。在我的例子中,我有一个方形金字塔。该点的验证是通过使用给定数量的半空间的交点体积,并确定该点是在前面还是后面的所有平面是跨越多面体的边。我很难理解参数n (见下文)的用法,它表示给定多面体的半空间数:
// Test if point p inside polyhedron given as the intersection volume of n halfspaces
int TestPointPolyhedron(Point p, Plane *h, int n) {
for (int i = 0; i < n; i++) {
if(DistPointPlane(p, h[i]) > 0.0f) return 0;
}
return 1;
}用DistPointPlane(...)计算给定点与平面之间的距离
float DistPointPlane(Point q, Plane p) {
return Dot(q, p.n) - p.d;
}Plane是一种在三维空间中表示平面的结构
struct Plane {
Vector n; // Plane normal. Point X on the plane satisfies Dot(n, X) = d
float d; // d = dot(n, p) for a given point on the plane
}
Plane ComputePlane(Point a, Point b, Point c) {
Plane p;
p.n = Normalize(Cross(b - a, c - a));
p.d = Dot(p.n, a);
return p;
}该算法所做的基本工作如下:
- 对于给定的点,计算它与凸多面体的每个平面的距离。
- 检查距离是负的还是正的
- 如果距离是负的,那么点就在飞机正常的另一边,所以它就在后面。
- 否则点在飞机的同侧,所以它就在飞机的前面
- 如果点在给定多面体的所有平面后面,则它位于在内,否则它位于之外的。
就我所知的一个方形金字塔来说,有10个半空间,因为我们有4个边和一个基,每个代表一个独立的平面(总共有5个平面),它把三维空间分成两个半空间(5 planes * 2 = 10 halfspaces)。我不明白的是,在上面算法的代码中使用了n。它用作循环的终止条件,循环遍历Plane实例数组。然而,如前所述,有10个半空间。
经过一番挖掘,我想到的一件事是,两个平面之间的交点是一条线(金字塔的边缘)。进一步引用沃尔夫拉姆·马西尔
要唯一地指定行,还需要在行上找到一个特定的点。这可以通过在两个平面上同时找到一个点来确定。
每个金字塔的顶点都满足这一要求,因为对于任何给定的两边(包括底部),我们都得到了一条位于金字塔的两个顶点之间的直线。因此,在交集方面,我们确实有5 (4表示底部,1表示顶点),但是书中的文本(包括函数实现上面的注释)含糊不清,阅读它可能会产生错误的想法(至少这是我的情况)。
我的思路是否接近真理,还是我在数学知识方面遗漏了很大一部分?
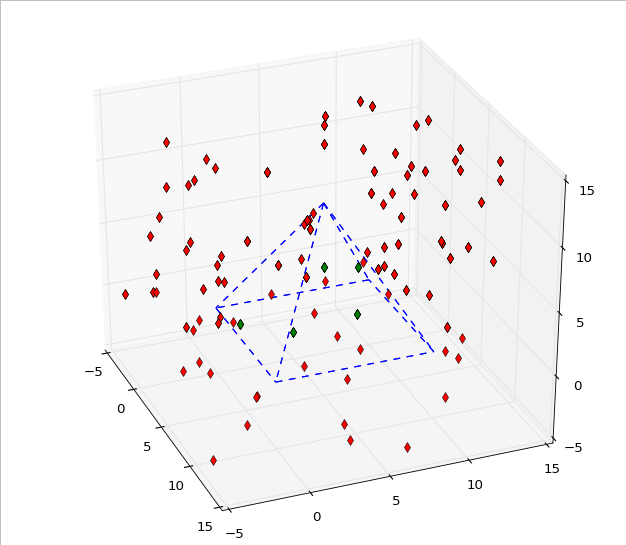
我已经将代码移植到Python3中,并修改了算法,使其只遍历我的平面列表,而不带额外的参数(如果我的想法是正确的,它基本上与最初的参数相同),并用matplotlib绘制了它。它非常好,但我仍然想知道我是否正确地理解了它:
Stack Overflow用户
发布于 2018-04-07 15:14:39
我想说的是,你对这件事的理解最多。我不知道你说的“距离”到底是什么意思。通常,点积提供两个向量之间的角度。在你的例子中,有一个位置向量(点)和一个法线向量。由于余弦定律,如果点积大于0,则两个向量之间的夹角小于90度。另一方面,如果产品是负的,角度大于90度。如果是0,则向量是正交的。基本上,这与距离无关,而是与角度有关。
https://stackoverflow.com/questions/39740727
复制相似问题
腾讯云开发者
