
极坐标在UIImage中的应用
极坐标在UIImage中的应用
提问于 2017-01-08 13:54:31
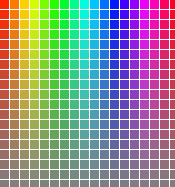
我想把普通全景照片转换成极坐标来创造一个“微小的地球”效应,但我想不出如何解决这个问题。我假设有一些有用的核心图形过滤器或第三方库,但我找不到任何。
示例:

回答 1
Stack Overflow用户
回答已采纳
发布于 2017-01-14 14:24:50
这其实很简单,你只需要应用极坐标。下面是一个完全注释的示例(在C++中实现,仅用于数据结构和图像加载和显示时使用OpenCV ):
#include <opencv2/highgui.hpp>
// Function returning the bilinear interpolation of the input image at input coordinates
cv::Vec3b interpolate(const cv::Mat &image, float x, float y)
{
// Compute bilinear interpolation weights
float floorx=std::floor(x), floory=std::floor(y);
float fracx=x-floorx, fracy=y-floory;
float w00=(1-fracy)*(1-fracx), w01=(1-fracy)*fracx, w10=fracy*(1-fracx), w11=fracy*fracx;
// Read the input image values at the 4 pixels surrounding the floating point (x,y) coordinates
cv::Vec3b val00 = image.at<cv::Vec3b>(floory, floorx);
cv::Vec3b val01 = (floorx<image.cols-1 ? image.at<cv::Vec3b>(floory, floorx+1) : image.at<cv::Vec3b>(floory, 0)); // Enable interpolation between the last right-most and left-most columns
cv::Vec3b val10 = image.at<cv::Vec3b>(floory+1, floorx);
cv::Vec3b val11 = (floorx<image.cols-1 ? image.at<cv::Vec3b>(floory+1, floorx+1) : image.at<cv::Vec3b>(floory+1, 0)); // Enable interpolation between the last right-most and left-most columns
// Compute the interpolated color
cv::Vec3b val_interp;
val_interp.val[0] = cv::saturate_cast<uchar>(val00.val[0]*w00+val01.val[0]*w01+val10.val[0]*w10+val11.val[0]*w11);
val_interp.val[1] = cv::saturate_cast<uchar>(val00.val[1]*w00+val01.val[1]*w01+val10.val[1]*w10+val11.val[1]*w11);
val_interp.val[2] = cv::saturate_cast<uchar>(val00.val[2]*w00+val01.val[2]*w01+val10.val[2]*w10+val11.val[2]*w11);
return val_interp;
}
// Main function
void main()
{
const float pi = 3.1415926535897932384626433832795;
// Load and display color panorama image
cv::Mat panorama = cv::imread("../panorama_sd.jpg", cv::IMREAD_COLOR);
cv::namedWindow("Panorama");
cv::imshow("Panorama", panorama);
// Infer the size of the final image from the dimensions of the panorama
cv::Size result_size(panorama.rows*2, panorama.rows*2);
float ctrx=result_size.width/2, ctry=result_size.height/2;
// Initialize an image with black background, with inferred dimensions and same color format as input panorama
cv::Mat tiny_earth_img = cv::Mat::zeros(result_size, panorama.type());
cv::Vec3b *pbuffer_img = tiny_earth_img.ptr<cv::Vec3b>(); // Get a pointer to the buffer of the image (sequence of 8-bit interleaved BGR values)
// Generate the TinyEarth image by looping over all its pixels
for(int y=0; y<result_size.height; ++y) {
for(int x=0; x<result_size.width; ++x, ++pbuffer_img) {
// Compute the polar coordinates associated with the current (x,y) point in the final image
float dx=x-ctrx, dy=y-ctry;
float radius = std::sqrt(dx*dx+dy*dy);
float angle = std::atan2(dy,dx)/(2*pi); // Result in [-0.5, 0.5]
angle = (angle<0 ? angle+1 : angle); // Result in [0,1[
// Map the polar coordinates to cartesian coordinates in the panorama image
float panx = panorama.cols*angle;
float pany = panorama.rows-1-radius; // We want the bottom of the panorama to be at the center
// Ignore pixels which cannot be linearly interpolated in the panorama image
if(std::floor(panx)<0 || std::floor(panx)+1>panorama.cols || std::floor(pany)<0 || std::floor(pany)+1>panorama.rows-1)
continue;
// Interpolate the panorama image at coordinates (panx, pany), and store this value in the final image
pbuffer_img[0] = interpolate(panorama, panx, pany);
}
}
// Display the final image
cv::imwrite("../tinyearth.jpg", tiny_earth_img);
cv::namedWindow("TinyEarth");
cv::imshow("TinyEarth", tiny_earth_img);
cv::waitKey();
}样本输入全景图(来源):
{kind=link}

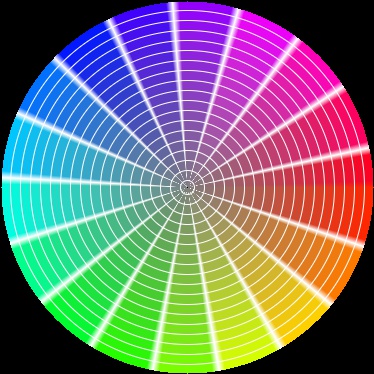
由此产生的图像:

编辑
要回答关于黑色边框的问题,您可以调整映射函数(它将最终图像中的像素坐标映射为全景图像中的像素坐标),以实现您想要做的事情。下面是一些示例:
来源全景图:
1)原始映射:半径>全景图/2的像素未被触摸(因此可以显示任何背景图像)
float panx = panorama.cols*angle;
float pany = panorama.rows-1-radius;结果:
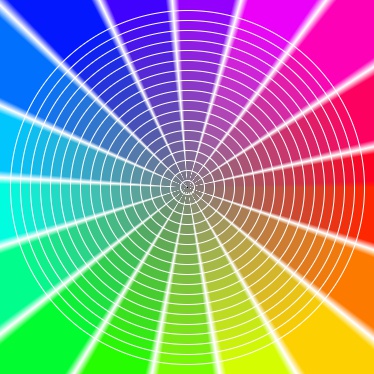
2)最近点映射:具有半径>全景图的像素。行/2映射到全景图中最接近的有效像素。
float panx = panorama.cols*angle;
float pany = std::max(0.f,panorama.rows-1-radius);结果:
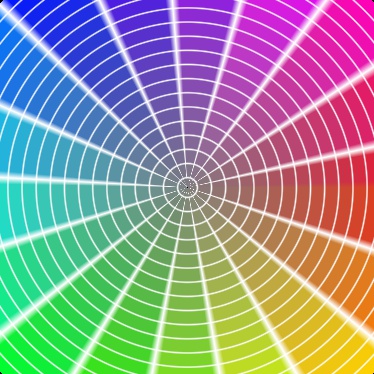
3)缩放映射:将微小地球图像放大,使半径>全景图的像素被映射到有效的全景像素,但是全景图的某些部分现在被映射到微地球图像之外(在上/下/左/右)。
float panx = panorama.cols*angle;
float pany = panorama.rows-1-0.70710678118654752440084436210485*radius;结果:
4)对数映射:利用一个包含对数函数的非线性映射来最小化全景图在微小地球图像外的区域(你可以调整100常数来或多或少地缩放)。
const float scale_cst = 100;
float panx = panorama.cols*angle;
float pany = (panorama.rows-1)*(1-std::log(1+scale_cst*0.70710678118654752440084436210485*radius/panorama.rows)/std::log(1+scale_cst));结果:
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/41533441
复制相关文章
相似问题
腾讯云开发者
