
快速可靠的反射球检测方法
快速可靠的反射球检测方法
提问于 2017-03-09 21:47:53
我有一个反射率很高的球,它看起来像这样:

什么是实时检测球的稳健方法?(5-10 FPS)
我尝试过几种分割算法,但它们无法将球从背景中分离出来,而是将球切成碎片,因为球本身有许多不同的区域。
由于反射性质,简单的圆形hough变换不能很好地工作。同样的情况也适用于任何简单的调整或形态操作。
你对一般的反射面有什么建议吗?
回答 1
Stack Overflow用户
回答已采纳
发布于 2017-03-10 23:32:03
HoughCircles的建议是很棒的,只要您对球在框架中的移动方式有大致的了解,因此大致知道您的最小、最大半径是多少:
import numpy as np
import cv2
import cv2.cv as cv
img = cv2.imread('wcEXm.jpg',0)
#Method 1: Hough Circles
img = cv2.medianBlur(img,5)
cimg = cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)
# HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]])
circles = cv2.HoughCircles(img,cv.CV_HOUGH_GRADIENT,dp=1,minDist=50,param1=127,param2=30,minRadius=50,maxRadius=150)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
# draw the outer circle
cv2.circle(cimg,(i[0],i[1]),i[2],(0,255,0),2)
# draw the center of the circle
cv2.circle(cimg,(i[0],i[1]),2,(0,0,255),3)
cv2.imshow('detected circles',cimg)

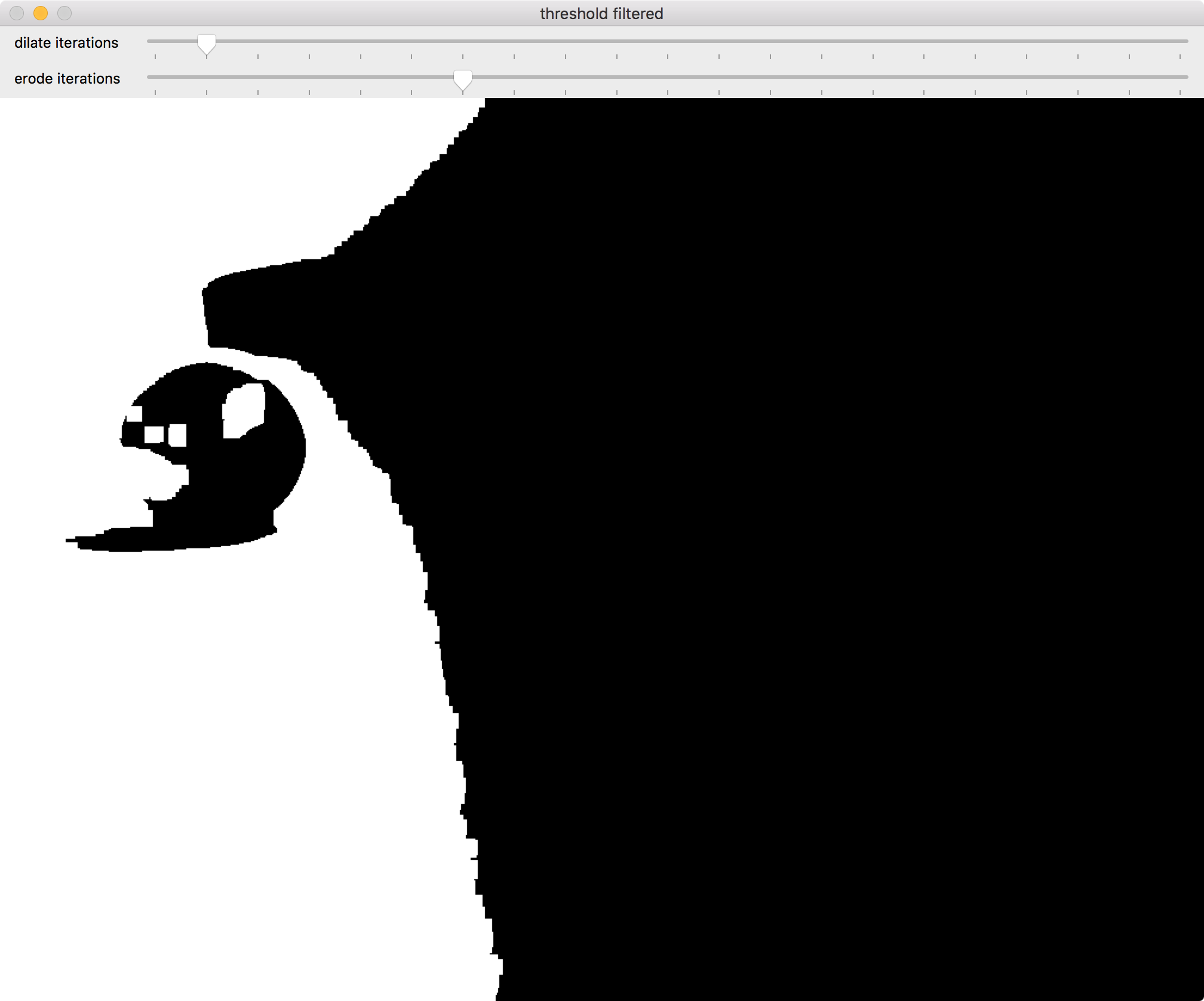
另一种选择是使用findContours()。有了正确的选项和一些过滤(例如,dilate(),erode()),您可以将球从背景中分割出来,而宽度和高度之间的比率(接近正方形)将有所帮助。
然而,如果你对球的大小不感兴趣的话,还有一件很简单的事情,就是知道球在哪里。你的球是反射的,甚至开始探测到你需要一个光源,因此,即使颜色/环境看起来不同,球也会有亮点。假设镜框中没有光源,你的反光球很可能是场景中下一个最亮的东西:
import cv2
img = cv2.imread('wcEXm.jpg',0)
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(img)
cv2.circle(img, maxLoc, 20, (0,192,0),10)

就RaspberryPi的性能而言,我建议如下:
- 禤浩焯的关于在Python中使用PiCam与OpenCV的教程
- 如果您计划使用
minMaxLoc()或其他处理灰度图像的函数,您可以使用'yuv'颜色空间,只需使用Y(亮度)通道来节省一些不需要从RGB转换到lumma/grayscale的时间。 - 使用较小的分辨率(例如320x240或160x120)。如果你需要把球的x,y位置映射到别的地方,你可以把结果放大。
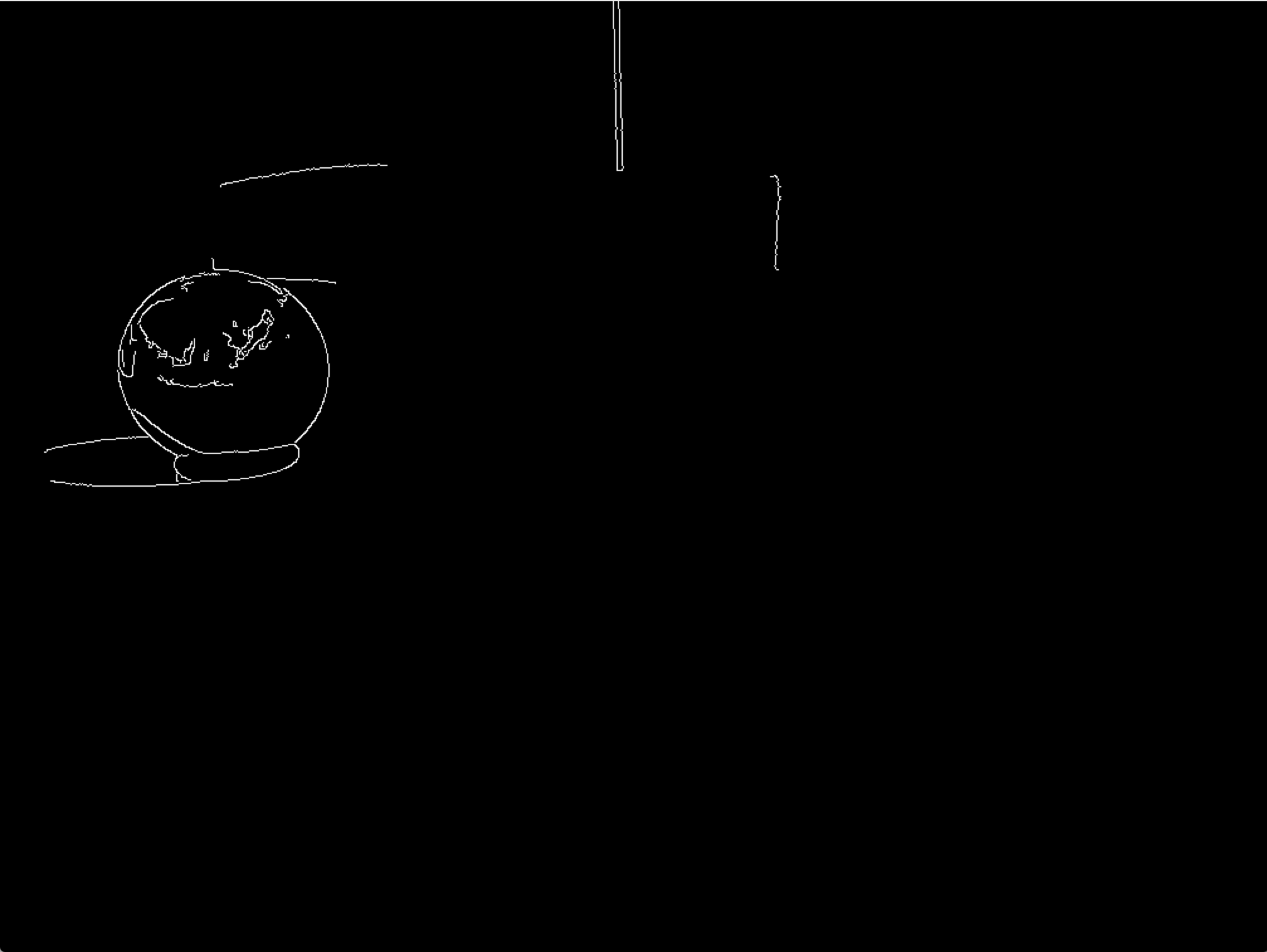
更新:还有一件可能会有帮助的事情是精明边缘检测,因为场景很简单,球会很突出:
edges = cv2.Canny(img,100,200)

页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/42706085
复制相关文章
相似问题
腾讯云开发者
