
llvm::DenseMap和std::map的异同
最近,我遇到了DenseMap数据结构,它在虚拟现实中得到了广泛的应用。我认为这是std::map(?)的某种优化版本。有人能帮我理解他们之间的区别或相似之处吗?
回答 1
Stack Overflow用户
发布于 2019-01-30 22:11:47
llvm::DenseMap是std::unordered_map的替代品,所以它并不完全用于替换std::map (至少如果您已经根据有序属性和无序属性仔细选择了std::map)。
与std::unordered_map不同,std::map保证容器的迭代顺序与您的比较器定义的顺序相匹配(默认情况下是std::less)。在很多情况下,你不关心迭代顺序.但在少数重要的情况下,DenseMap不是一种选择。
现在,将DenseMap与std::unordered_map进行对比:与std容器不同,DenseMap将其所有数据保存在一个内存分配中,并且取消存储桶,以便将键和值保持在内存中。这两个特性对于数据局部性来说都是一个巨大的胜利,因此在几乎所有的情况下都是快速的。
此外,DenseMap默认分配大量的键/值对(实际上是64),因此在小尺寸时,插入几乎是免费的。当然,这样做的缺点是,如果您创建了很多非常小的映射,或者您的类型本身很大,那么内存效率就很低;如果您的容器将永远增长到64个元素,那么您就是在浪费内存。根据您的用例,这可能会或不会对您造成实际伤害。
与std::unordered_map相比,最后一个不同之处可能会让一些人措手不及:每次插入后,DenseMap的迭代器都会失效(与std::map和std::unordered_map不同,后者只有当缓存重散时迭代器才失效)。我认为这主要是一个理论问题,因为您当然可以只存储密钥而不是迭代器。(与向量不同,找到保留映射迭代器的真正代码是相当罕见的。)
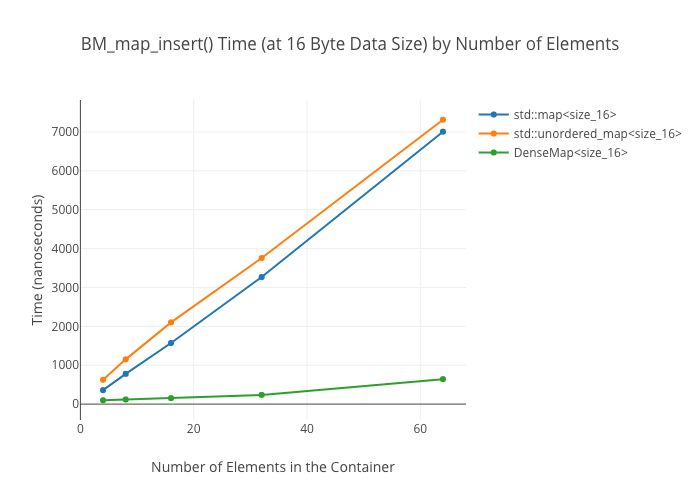
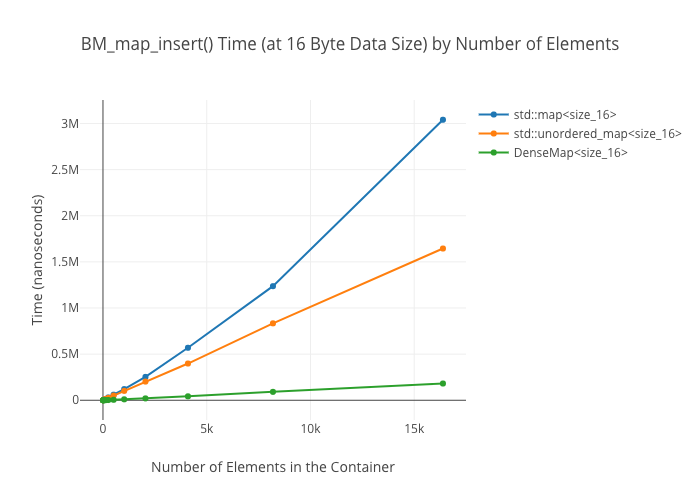
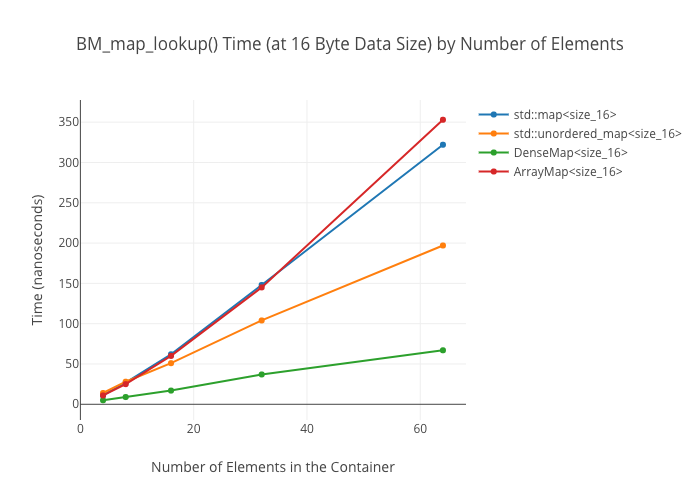
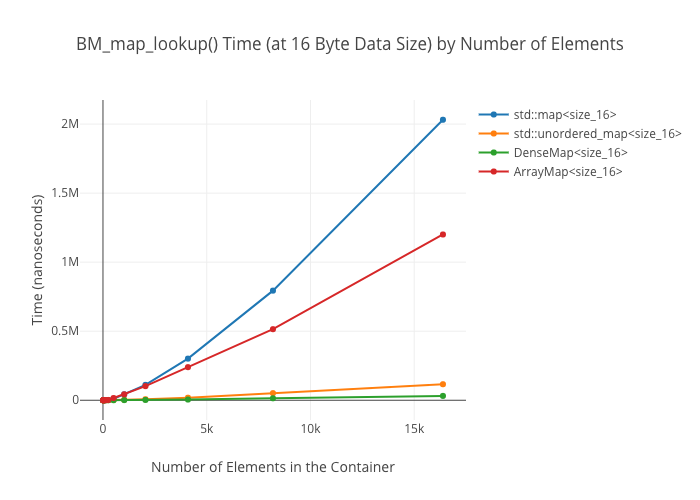
我已经收集了一些比较DenseMap和std容器的DenseMap,以及如果您想在自己的机器上运行基准测试的话GitHub回购。下面是四个选定的图表,显示不同尺寸的地图的插入和随机查找速度。
小地图中的插入速度
大地图中的插入速度
小地图中的随机查找
大型地图中的随机查找
https://stackoverflow.com/questions/43191216
复制相似问题
腾讯云开发者
