
solvePnP/solvePnPRansac不能给出良好的摄像机位置估计
solvePnP/solvePnPRansac不能给出良好的摄像机位置估计
提问于 2017-12-13 02:20:12
我试图使用这段代码通过在图片中定位平面图像来找到摄像机的位置:
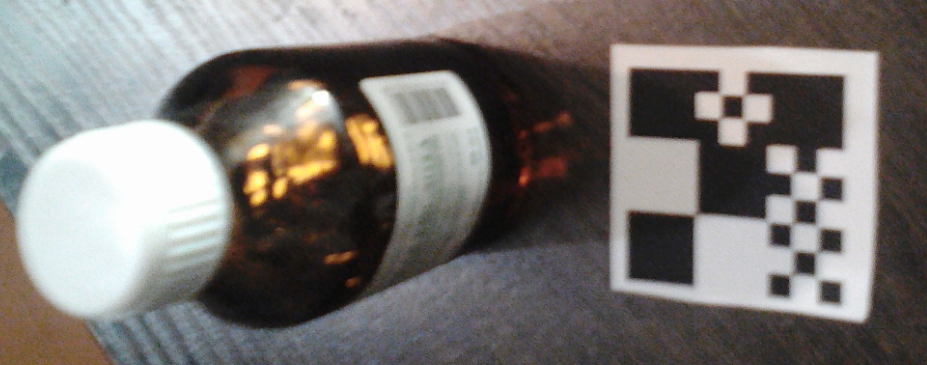
对于这张图片,它工作正常:

找到了模式。我使用cv2.projectPoint在背景图片上绘制图像:

但是,有时solvePnP会返回疯狂的结果,例如对于这个图像:
如果我重新设计模式,我会得到疯狂的图像位置:

对于本例,我已经验证了SIFT点,它们看起来正确并匹配:
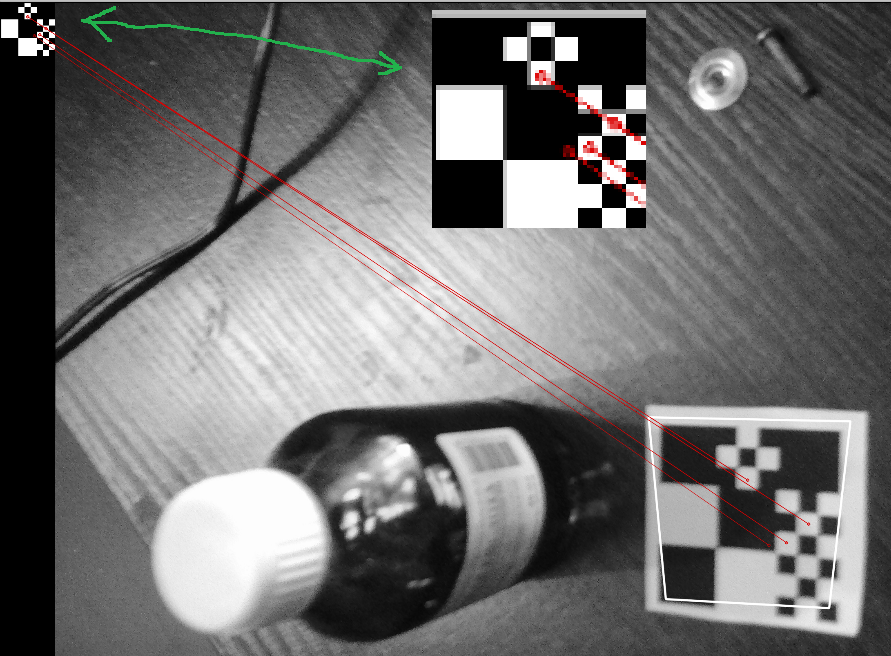
我试着用solvePnPRansac代替solvePnP,但这没有帮助,估计位置仍然是stange。原因可能是什么,我如何解决这个问题?
Stack Overflow用户
回答已采纳
发布于 2017-12-14 07:19:28
好的,在这种情况下,我设法通过将失真矩阵设置为np.array([])来改进姿态估计,因为我已经在SIFT之前纠正了图像。同样适用于cv2.projectPoints,也不需要为这个函数提供失真系数。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/47784542
复制相关文章
相似问题
腾讯云开发者
