
阿诺德猫图
挑战
给定相同宽度和高度的彩色光栅图像,输出在阿诺德猫图下转换的图像。(*详情见下文)
定义
考虑到图像N的大小,我们假设像素的坐标是以0和N-1之间的数字表示的。
然后,阿诺德的猫地图定义如下:
坐标[x,y]处的像素被移动到[(2*x + y) mod N, (x + y) mod N]。
这只不过是环面上的线性变换:由于mod N,黄色、紫色和绿色部分被映射回初始正方形。

这个映射(让我们称之为f)具有以下属性:
- 它是双射的,这意味着可逆:它是与矩阵
[[2,1],[1,1]]的线性变换。由于它有行列式1,并且只有整数项,逆也只有整数项,由[[1,-1],[-1,2]]给出,这意味着它在整数坐标上也是双射的。 - 它是
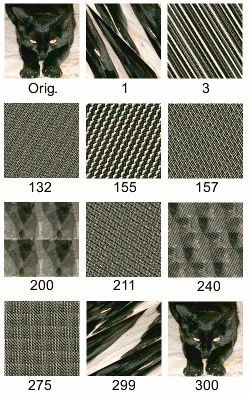
N x N图像的一组双射映射的扭转元素,这意味着如果您多次应用它,您将得到原始图像:f(f(...f(x)...)) = x--应用到它自身的映射的次数,其结果是标识的数量保证小于或等于3*N。在以下中,您可以看到在阿诺德的猫映射的给定次数的迭代应用程序之后,猫的图像,以及重复应用程序的样子的动画:
详细信息
- 您的程序不必处理图像,但是2D数组/矩阵、字符串或类似的2D结构也是可以接受的。
- 您的
(0,0)点位于左下角还是左上角并不重要。(或者在任何其他角落,如果这在您的语言中更方便的话)。请具体说明您在提交时使用的约定。
测试案例
矩阵形式([1,2,3,4]是顶行,1有索引(0,0),2有索引(1,0),5有索引(0,1))
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
maps to:
1 14 11 8
12 5 2 15
3 16 9 6
10 7 4 13
--------------------
1 2 3
4 5 6
7 8 9
map to:
1 8 6
9 4 2
5 3 7作为图像(左下角是(0,0)):

回答 5
Code Golf用户
发布于 2017-01-02 19:47:53
Mathematica,44个字节
(n=MapIndexed[RotateLeft[#,1-#2]&,#]&)@*n林恩奇异算法港。在上一次U+F3C7编码之前,有一个不可见的3字节字符,即UTF-8编码中的];Mathematica将其呈现为上标T,并接受矩阵的转置。
Mathematica,54字节
Table[#2[[Mod[2x-y-1,#]+1,Mod[y-x,#]+1]],{x,#},{y,#}]&未命名函数采用两个参数,一个正整数#和一个维#x#的2D数组#2,并返回一个形状相似的2D数组。与给定的测试用例一样,坐标{0,0}的点位于左上角,x轴是水平的。使用问题中提到的逆[[1,-1],[-1,2]]直接实现,在第一个坐标中有一个-1来解释数组本身就是1-索引的事实。如果不允许我们把矩阵的维数作为附加参数,那么这个解就长了9个字节(用aS代替第一个#-not#2-with a=Length@#和所有后来的#s )。
Code Golf用户
发布于 2017-01-02 20:16:34
Haskell,55字节
m#n|r<-[0..n-1]=[[m!!mod(2*y-x)n!!mod(x-y)n|x<-r]|y<-r]用法示例:[[1,2,3,4],[5,6,7,8],[9,10,11,12],[13,14,15,16]] # 4 -> [[1,14,11,8],[12,5,2,15],[3,16,9,6],[10,7,4,13]]。
0,0是左上角。这使用了逆变换。
Code Golf用户
发布于 2017-01-02 20:41:56
ImageJ宏,29字节
v=getPixel((x+y)%w,(2*y+x)%h)- 莉娜的开放形象
- 从“进程”菜单中选择“数学/宏”。
https://codegolf.stackexchange.com/questions/105362
复制相似问题
腾讯云开发者
