【Linux系统编程】—— 深度解析进程等待与终止:系统高效运行的关键

【Linux系统编程】—— 深度解析进程等待与终止:系统高效运行的关键

用户11286421
发布于 2025-01-20 17:47:20
发布于 2025-01-20 17:47:20
进程创建
再次认识fork()函数
fork函数初识:在linux中fork函数是⾮常重要的函数,它从已存在进程中创建⼀个新进程。新进程为⼦进程,⽽原进程为⽗进程。
#include <unistd.h>
pid_t fork(void);
返回值:⾃进程中返回0,⽗进程返回⼦进程id,出错返回-1进程调⽤fork,当控制转移到内核中的fork代码后,内核做:
- 分配新的内存块和内核数据结构给⼦进程
- 将⽗进程部分数据结构内容拷⻉⾄⼦进程
- 添加⼦进程到系统进程列表当中
- fork返回,开始调度器调度
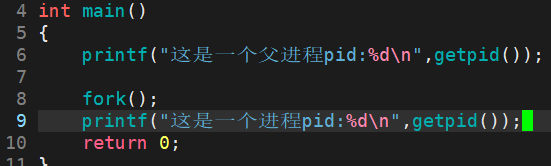
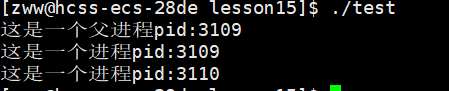
可以看到, 里面创建了一个进程pid3109,这其实就是子进程。
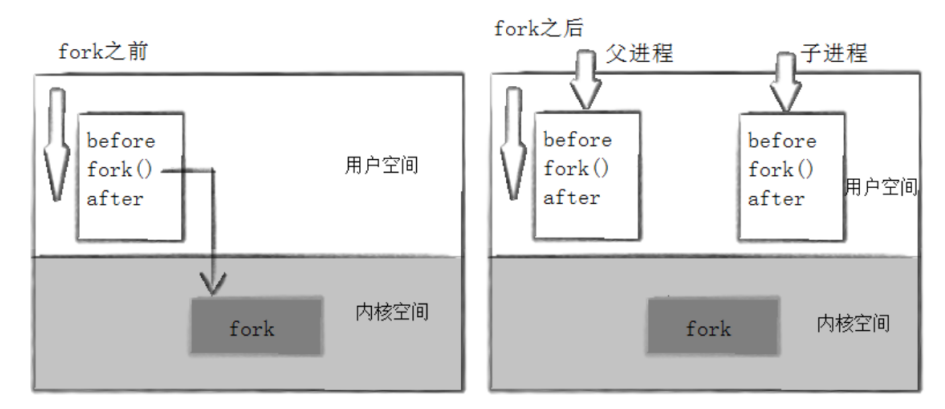
当⼀个进程调⽤fork之后,就有两个⼆进制代码相同的进程。⽽且它们都运⾏到相同的地⽅。但每个进 程都将可以开始它们⾃⼰的旅程,看如下程序。
int main( void )
{
pid_t pid;
printf("Before: pid is %d\n", getpid());
if ( (pid=fork()) == -1 )perror("fork()"),exit(1);
printf("After:pid is %d, fork return %d\n", getpid(), pid);
sleep(1);
return 0;
}运⾏结果:
[root@localhost linux]# ./a.out
Before: pid is 43676
After:pid is 43676, fork return 43677
After:pid is 43677, fork return 0这⾥看到了三⾏输出,⼀⾏before,两⾏after。进程43676先打印before消息,然后它有打印after。 另⼀个after消息有43677打印的。注意到进程43677没有打印before,为什么呢?如下图所⽰
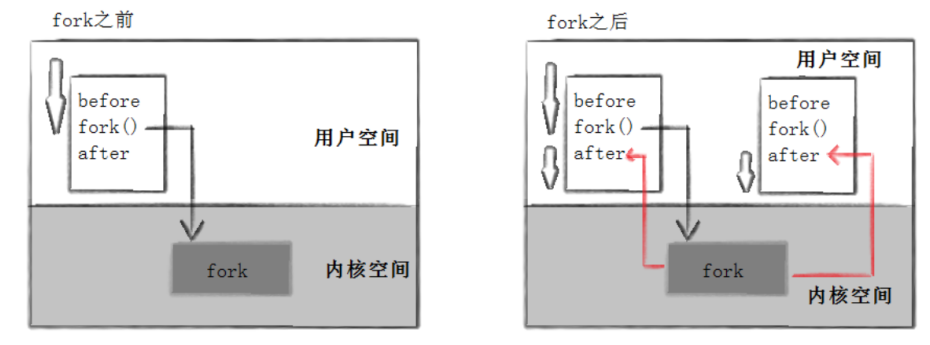
所以,fork之前⽗进程独⽴执⾏,fork之后,⽗⼦两个执⾏流分别执⾏。注意,fork之后,谁先执⾏完全由调度器决定。
fork()函数返回值
- ⼦进程返回0,
- ⽗进程返回的是⼦进程的pid。
写时拷贝
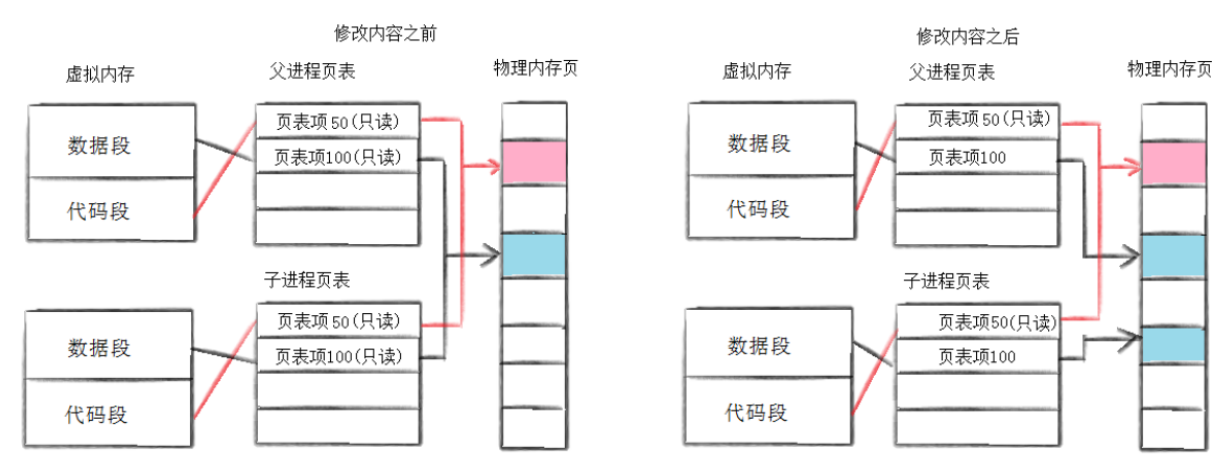
写时拷贝(Copy-on-write, COW)是一种优化技术,广泛应用于计算机系统中,特别是在操作系统、虚拟化和内存管理领域。其主要目的是节省内存资源和提高效率。
工作原理: 写时拷贝的基本思想是,当多个进程共享相同的资源(例如内存或文件)时,如果一个进程对这些资源进行修改,系统并不会立即为该进程创建资源的副本,而是推迟到该进程真正进行修改时,才为它分配一个新的副本。具体步骤如下:
- 共享资源:多个进程最初可以共享同一块内存区域或文件(即资源是只读的)。
- 标记只读:系统会将这些共享的资源标记为只读。
- 修改时拷贝:当一个进程尝试修改共享资源时,操作系统会为该进程创建资源的副本,并将其设为可写。其他进程仍然使用原始资源,而修改的进程则使用新的副本。
- 继续共享:如果其他进程继续只读访问原始资源,不会进行拷贝,节省内存和计算资源。 具体的理解可以看下面这一张图片:
优点:
- 节省内存:由于多个进程或线程可以共享同一资源副本,减少了内存的消耗。
- 提高性能:避免不必要的拷贝操作,只有在修改资源时才进行拷贝,从而提高了效率。
- 提高数据一致性:写时拷贝确保在修改数据时不会影响其他进程或线程读取到的数据,避免了数据冲突。
缺点:
- 延迟开销:在第一次修改资源时,系统需要创建资源的副本,这可能带来一定的性能开销。
- 资源消耗:如果多个进程频繁进行写操作,系统会进行多次资源拷贝,可能增加资源消耗。
fork常规⽤法以及调用失败的原因
- ⼀个⽗进程希望复制⾃⼰,使⽗⼦进程同时执⾏不同的代码段。例如,⽗进程等待客⼾端请求,⽣成⼦进程来处理请求。
- ⼀个进程要执⾏⼀个不同的程序。例如⼦进程从fork返回后,调⽤exec函数。
原因:
- 系统中有太多的进程
- 实际⽤⼾的进程数超过了限制
进程终⽌
进程终⽌的本质是释放系统资源,就是释放进程申请的相关内核数据结构和对应的数据和代码。
进程终止对应的三种情况
- 代码运⾏完毕,结果正确
- 代码运⾏完毕,结果不正确
- 代码异常终止
进程常⻅退出⽅法
正常终⽌(可以通过 echo $? 查看进程退出码):
- 从main返回
- 调⽤exit
- _exit
异常退出:
- ctrl + c,信号终⽌
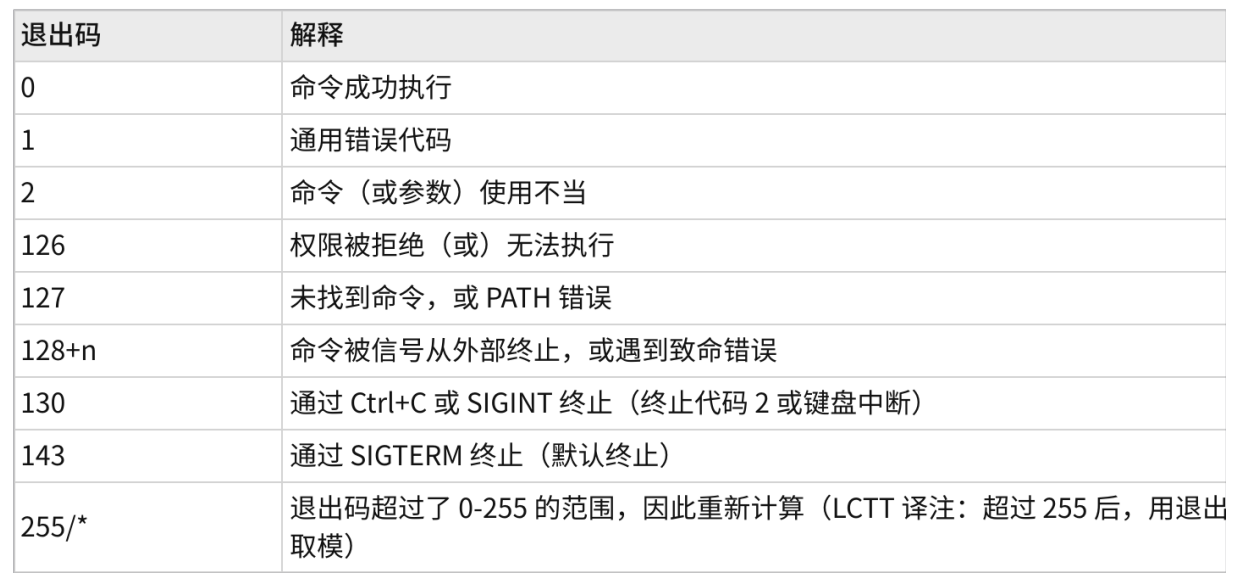
退出码(退出状态)可以告诉我们最后⼀次执⾏的命令的状态。在命令结束以后,我们可以知道命令是成功完成的还是以错误结束的。其基本思想是,程序返回退出代码 0 时表⽰执⾏成功,没有问题。
代码 1 或 0 以外的任何代码都被视为不成功。
下面是Linuxshell常见的退出码
_exit函数
#include <unistd.h>
void _exit(int status);
参数:status 定义了进程的终⽌状态,⽗进程通过wait来获取该值- 说明:虽然status是int,但是仅有低8位可以被⽗进程所⽤。所以_exit(-1)时,在终端执⾏$?发现返回值是255。
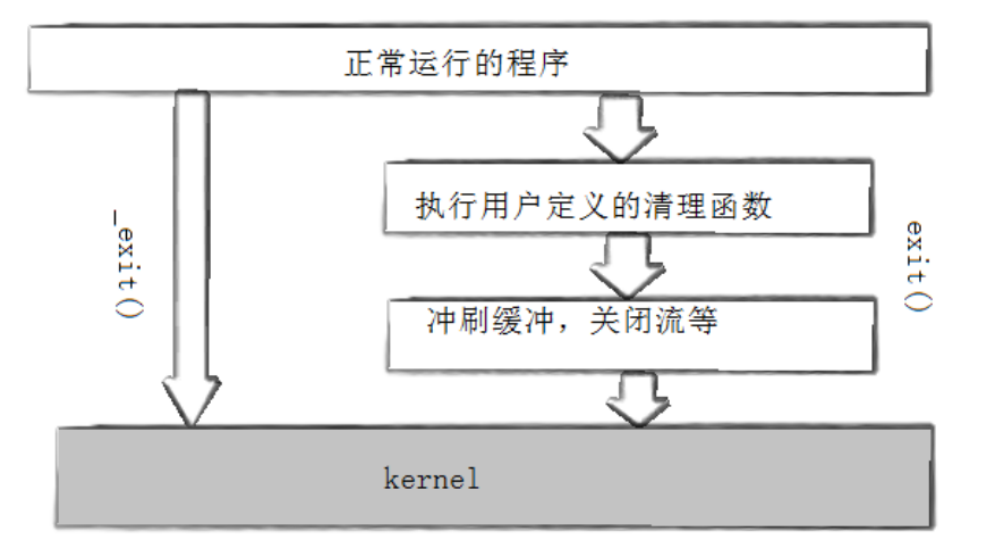
exit函数
#include <unistd.h>
void exit(int status);exit最后也会调⽤_exit, 但在调⽤_exit之前,还做了其他⼯作:
- 执⾏⽤⼾通过 atexit或on_exit定义的清理函数。
- 关闭所有打开的流,所有的缓存数据均被写⼊
- 调⽤_exit
示例;
int main()
{
printf("hello");
exit(0);
}
int main()
{
printf("hello");
_exit(0);
}上面的结果分别为:
运⾏结果:
[root@localhost linux]# ./a.out
hello[root@localhost linux]#
运⾏结果:
[root@localhost linux]# ./a.out
[root@localhost linux]#return退出
return是⼀种更常⻅的退出进程⽅法。执⾏return n等同于执⾏exit(n),因为调⽤main的运⾏时函数会将main的返回值当做 exit的参数。
进程等待
进程等待是指在操作系统中,当一个进程无法继续执行时,它进入一种阻塞状态,等待某些条件或事件的发生才能恢复执行。等待通常发生在进程需要等待资源(如CPU、内存、I/O设备等)或与其他进程之间的同步和通信。
进程等待的必要性
- 资源共享与避免冲突:多个进程共享资源时,等待机制确保不会发生冲突,避免竞争条件。
- 进程同步与通信:确保进程按照正确顺序执行,例如生产者和消费者模型。
- CPU资源管理:避免无谓的CPU占用,让等待的进程释放CPU,提高系统效率。
- 防止死锁:通过合理设计等待策略,避免多个进程互相等待,进入死锁状态。
- 提升并发性:使系统能够并发执行多个进程,最大化资源利用。
- 提高系统稳定性:管理进程优先级,保证重要任务及时执行,确保系统稳定运行。
进程等待的⽅法
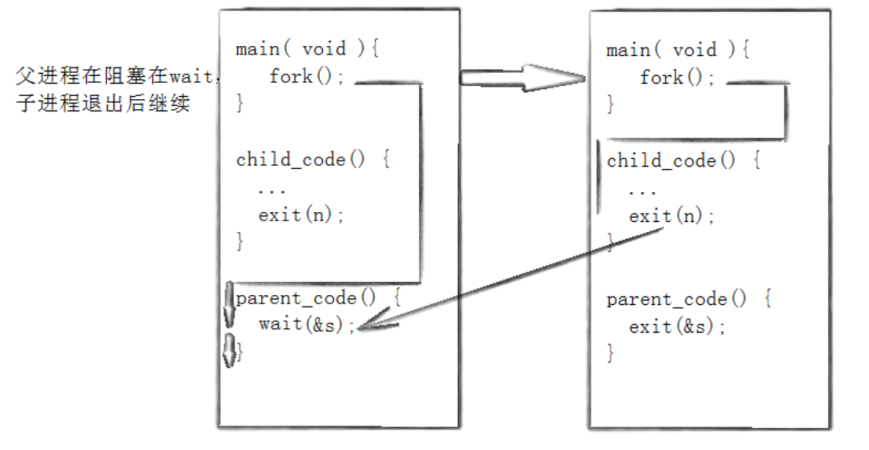
- wait⽅法
#include<sys/types.h>
#include<sys/wait.h>
pid_t wait(int* status);
返回值:
成功返回被等待进程pid,失败返回-1。
参数:
输出型参数,获取⼦进程退出状态,不关⼼则可以设置成为NULL- waitpid⽅法
pid_ t waitpid(pid_t pid, int *status, int options);
返回值:
当正常返回的时候waitpid返回收集到的⼦进程的进程ID;
如果设置了选项WNOHANG,⽽调⽤中waitpid发现没有已退出的⼦进程可收集,则返回0;
如果调⽤中出错,则返回-1,这时errno会被设置成相应的值以指⽰错误所在;
参数:
pid:
Pid=-1,等待任⼀个⼦进程。与wait等效。
Pid>0.等待其进程ID与pid相等的⼦进程。
status: 输出型参数
WIFEXITED(status): 若为正常终⽌⼦进程返回的状态,则为真。(查看进程是否是正常退出)
WEXITSTATUS(status): 若WIFEXITED⾮零,提取⼦进程退出码。(查看进程的退出码)
options:默认为0,表⽰阻塞等待。
WNOHANG: 若pid指定的⼦进程没有结束,则waitpid()函数返回0,不予以等待。若正常结束,则返回该⼦进程的ID。- 如果⼦进程已经退出,调⽤wait/waitpid时,wait/waitpid会⽴即返回,并且释放资源,获得⼦进程退出信息。
- 如果在任意时刻调⽤wait/waitpid,⼦进程存在且正常运⾏,则进程可能阻塞。
- 如果不存在该⼦进程,则⽴即出错返回。
- 获取⼦进程status
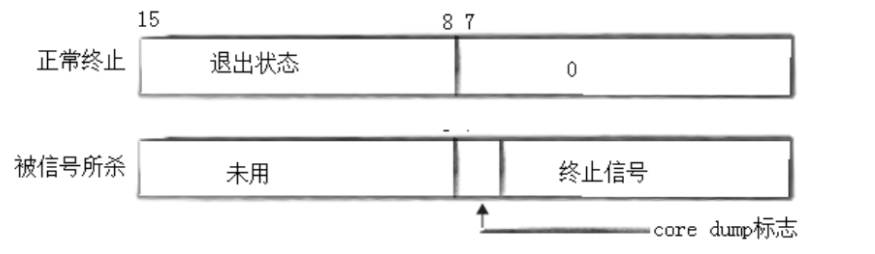
- wait和waitpid,都有⼀个status参数,该参数是⼀个输出型参数,由操作系统填充。
- 如果传递NULL,表⽰不关⼼⼦进程的退出状态信息。
- 否则,操作系统会根据该参数,将⼦进程的退出信息反馈给⽗进程。
- status不能简单的当作整形来看待,可以当作位图来看待,具体细节如下图(只研究status低16⽐特位):
进程的阻塞等待⽅式:
int main()
{
pid_t pid;
pid = fork();
if(pid < 0)
{
printf("%s fork error\n",__FUNCTION__);
return 1;
}
else if( pid == 0 )
{ //child
printf("child is run, pid is : %d\n",getpid());
sleep(5);
exit(257);
}
else
{
int status = 0;
pid_t ret = waitpid(-1, &status, 0);//阻塞式等待,等待5S
printf("this is test for wait\n");
if( WIFEXITED(status) && ret == pid )
{
printf("wait child 5s success, child return code is :%d.\n",WEXITSTATUS(status));
}
else
{
printf("wait child failed, return.\n");
return 1;
}
}
return 0;
}
运⾏结果:
[root@localhost linux]# ./a.out
child is run, pid is : 45110
this is test for wait
wait child 5s success, child return code is :1.进程的⾮阻塞等待⽅式:
#include <stdio.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <unistd.h>
#include <vector>
typedef void (*handler_t)(); // 函数指针类型
std::vector<handler_t> handlers; // 函数指针数组
void fun_one()
{
printf("这是⼀个临时任务1\n");
}
void fun_two()
{
printf("这是⼀个临时任务2\n");
}
void Load()
{
handlers.push_back(fun_one);
handlers.push_back(fun_two);
}
void handler()
{
if (handlers.empty())
Load();
for (auto iter : handlers)
iter();
}
int main()
{
pid_t pid;
pid = fork();
if (pid < 0)
{
printf("%s fork error\n", __FUNCTION__);
return 1;
}
else if (pid == 0)
{ // child
printf("child is run, pid is : %d\n", getpid());
sleep(5);
exit(1);
}
else
{
int status = 0;
pid_t ret = 0;
do
{
ret = waitpid(-1, &status, WNOHANG); // ⾮阻塞式等待
if (ret == 0)
{
printf("child is running\n");
}
handler();
} while (ret == 0);
if (WIFEXITED(status) && ret == pid)
{
printf("wait child 5s success, child return code is :%d.\n",
WEXITSTATUS(status));
}
else
{
printf("wait child failed, return.\n");
return 1;
}
}
return 0;
}本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-01-19,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号