
与复合对象的圆碰撞
与复合对象的圆碰撞
提问于 2018-04-14 13:49:48
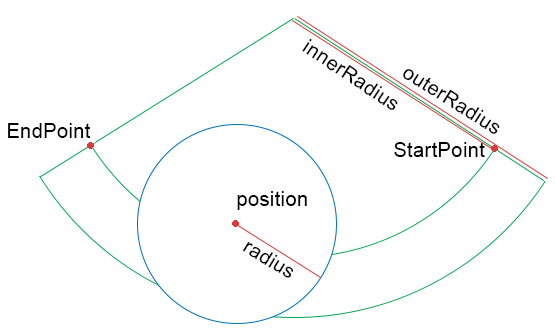
我想做一个圆环和圆环截面之间的碰撞检测。圆是由它的position位置和radius定义的。另一个对象由inner和outer半径定义,然后是startPoint和endPoint,两者都是x,y点。
在下面的例子中,this是圆,other是环部分。
首先,我只检查它是否与整个环碰撞。这是没有问题的。
float mag = this.position.Magnitude();
if (mag < other.InnerRadius() - this.radius ||
mag > other.OuterRadius() + this.radius) {
return false;
}但是,我需要检查圆是在这两个点定义的部分的内部还是外部。我能得到的最接近的,是检查它是否与开始向量和结束向量发生碰撞,但是当圆环完全在环段内时,这会返回错误的结果。
auto dot1 = Vector::Dot(position, other.StartPoint());
auto projected1 = dot1 / Vector::Dot(other.StartPoint(), other.StartPoint()) * other.StartPoint();
auto distance1 = Vector::Distance(position, projected1);
auto dot2 = Vector::Dot(position, other.EndPoint());
auto projected2 = dot2 / Vector::Dot(other.EndPoint(), other.EndPoint()) * other.EndPoint();
auto distance2 = Vector::Distance(position, projected2);
return distance1 < radius || distance2 < radius;检查一个圆是否与这两个向量定义的对象碰撞的最简单的方法是什么?
编辑:我在这里使用的所有点对象都是实现了所有向量操作的自定义Vector类。
Edit2:只是为了澄清一下,ring对象的原点是0,0
Stack Overflow用户
回答已采纳
发布于 2018-04-14 15:04:57
下面是一个简单的算法。
首先,让我们就变量名称达成一致:
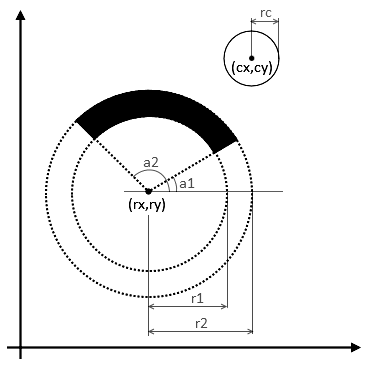
这里是r1 ≤ r2,-π/2 ≤ a1 ≤ a2 ≤ π/2。
(正如我在评论中被提醒的那样,你有起点和终点,而不是角度,但我会使用角度,因为它们看起来更方便。您可以通过atan2(y-ry, x-rx)轻松地从点获得角度,只需确保a1 ≤ a2。或者你可以重写算法,完全不使用角度。)
我们需要考虑三个不同的案例。这种情况取决于圆心相对于环段的位置:
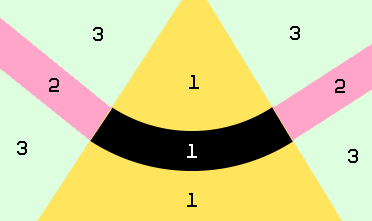
在第一种情况下,正如您已经指出的,如果向量(cx-rx, cy-ry)的长度大于r1-rc而小于r2+rc,则会发生碰撞。
在第二种情况下,如果圆心与最接近的直线边缘之间的距离小于rc,则发生碰撞。
在第三种情况下,如果圆心与4个拐角的最近距离小于rc,则发生碰撞。
以下是一些伪码:
rpos = vec2(rx,ry); // Ring segment center coordinates
cpos = vec2(cx,cy); // Circle coordinates
a = atan2(cy-ry, cx-rx); // Relative angle
r = length(cpos - rpos); // Distance between centers
if (a > a1 && a < a2) // Case 1
{
does_collide = (r+rc > a1 && r-rc < a2);
}
else
{
// Ring segment corners:
p11 = vec2(cos(a1), sin(a1)) * r1;
p12 = vec2(cos(a1), sin(a1)) * r2;
p21 = vec2(cos(a2), sin(a2)) * r1;
p22 = vec2(cos(a2), sin(a2)) * r2;
if (((cpos-p11) · (p12-p11) > 0 && (cpos-p12) · (p11-p12) > 0) ||
((cpos-p21) · (p22-p21) > 0 && (cpos-p22) · (p21-p22) > 0)) // Case 2
{
// Normals of straight edges:
n1 = normalize(vec2(p12.y - p11.y, p11.x - p12.x));
n2 = normalize(vec2(p21.y - p22.y, p22.x - p21.x));
// Distances to edges:
d1 = n1 · (cpos - p11);
d2 = n2 · (cpos - p21);
does_collide = (min(d1, d2) < rc);
}
else // Case 3
{
// Squared distances to corners
c1 = length_sqr(cpos-p11);
c2 = length_sqr(cpos-p12);
c3 = length_sqr(cpos-p21);
c4 = length_sqr(cpos-p22);
does_collide = (sqrt(min(c1, c2, c3, c4)) < rc);
}
}页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/49832150
复制相关文章
相似问题
腾讯云开发者
