【SLAM】开源 | 香港大学以R3LIVE为基础,提出紧密耦合的激光雷达惯性视觉状态估计器的鲁棒实时辐射重建包R3LIVE++

【SLAM】开源 | 香港大学以R3LIVE为基础,提出紧密耦合的激光雷达惯性视觉状态估计器的鲁棒实时辐射重建包R3LIVE++

CNNer
发布于 2023-02-28 10:58:21
发布于 2023-02-28 10:58:21
论文地址:http://arxiv.org/pdf/2209.03666v1.pdf
来源:香港大学
论文名称:R3LIVE++: A Robust, Real-time, Radiance reconstruction package with a tightly-coupled LiDAR-Inertial-Visual state Estimator
原文作者:Jiarong Lin
内容提要
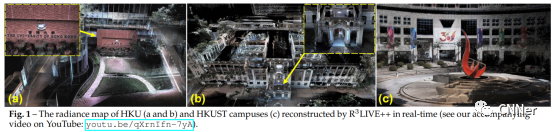
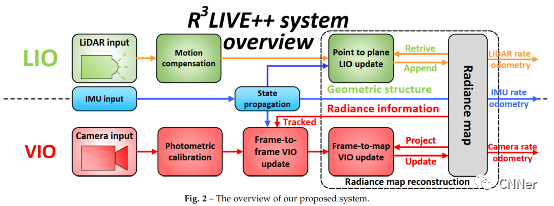
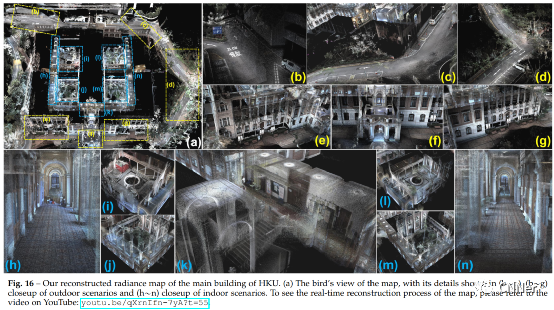
本文提出了一种称为R3LIVE++的雷达-惯性视觉融合框架,以实现鲁棒和准确的状态估计,同时动态重建辐射图。R3LIVE++由一个雷达惯性里程计(LIO)和一个视觉惯性里程计(VIO)组成,两者都是实时运行的。LIO子系统利用激光雷达的测量数据重建几何结构,而VIO子系统同时从输入图像中恢复几何结构的亮度信息。R3LIVE++是在R3LIVE的基础上开发的,通过考虑相机光度标定和相机曝光时间的在线估计,进一步提高了定位和测绘的精度。我们在公共和私有数据集上进行了更广泛的实验,将我们提出的系统与其他最先进的SLAM系统进行比较。定量和定性结果表明,R3LIVE++在准确性和鲁棒性方面都有显著提高。此外,为了证明R3LIVE++的可扩展性,我们基于重建的地图开发了几个应用程序,如高动态范围(HDR)成像、虚拟环境探索和3D视频游戏。最后,我们在Github上发布了代码、硬件设计和数据集。
主要框架及实验结果
相关文章链接
1. R2LIVE【传感器融合】开源 | 香港大学提出一种鲁棒的、实时紧密耦合的多传感器融合框架,性能SOTA!
2. R3LIVE【传感器融合】开源 | 香港大学R3LIVE:一种鲁棒的、实时的、RGB、激光雷达-惯性-视觉紧密耦合的状态估计工具包
声明:文章来自于网络,仅用于学习分享,版权归原作者所有
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2023-01-26,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号