3_机械臂位姿变换计算过程代码


1、aubo arcs sdk poseTrans 使用例子
先贴代码:
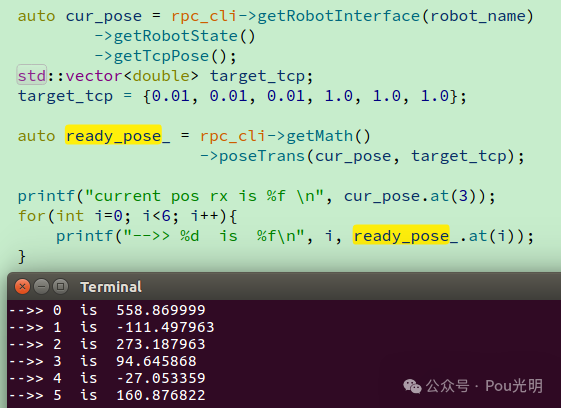
auto cur_pose = rpc_cli->getRobotInterface(robot_name)
->getRobotState()
->getTcpPose();
std::vectortarget_pose;
target_pose = {0, 0, 0.0, 0, 0.0, 1.0};
auto ready_pose_ = rpc_cli->getMath()
->poseTrans(cur_pose, target_pose);有了这部分代码,可以进一步说明与验证该接口。cur_pose是机械臂基于基坐标系的位置和姿态,毫米和弧度为单位,即p_from参数。对于target_pose参数,是对p_from进行的位置和姿态的变换,例子中target_pose表示位置不变,绕ry旋转1弧度。输出结果:
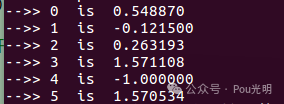
后面姿态表示是欧拉角,旋转方向是ZYX。绕Z轴旋转,但是变的是ry。OK,现在我们有了方程的参考答案,接下来自己推导解算过程。
2、借助Eigen库计算位姿变换
先整理下条件,已知当前机械臂的欧拉角姿态和位置,还已知变换的位姿。但从《机器人学导论》中学到的只有表示位姿的4×4的齐次位姿矩阵,所以需要欧拉角转旋转矩阵。
// 初始化欧拉角(rpy),对应绕x轴,绕y轴,绕z轴的旋转角度
Eigen::Vector3d euler_angle(pose_from.at(3) * DEG_TO_ARC,
pose_from.at(4) * DEG_TO_ARC,
pose_from.at(5) * DEG_TO_ARC);
// 使用Eigen库将欧拉角转换为旋转矩阵
Eigen::Matrix3d rotation_matrix1;
rotation_matrix1 = Eigen::AngleAxisd(euler_angle[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle[1], Eigen::Vector3d::UnitY())*
Eigen::AngleAxisd(euler_angle[0], Eigen::Vector3d::UnitX());上面转换也可以自己手写。

将位置与旋转矩阵姿态构造成齐次矩阵:
Eigen::Matrix <double, </double,3, 4> m3x4_to;
Eigen::Matrix <double, </double,4, 4> m4x4_to;
Eigen::Matrix <double, </double,4, 4> m4x4_ret;
m3x4_to << rotation_matrix1_to, pos_to;
cout << "m3x4_to is :\n" << m3x4_to << std::endl;// np.concatenate((a,b))
m4x4_to << m3x4_to, homogeneous;
m4x4_ret = m4x4*m4x4_to;
cout << "m4x4_to is: \n" << m4x4_ret << std::endl;
Eigen::Matrix <double, </double,3, 3> m3x3_ret = m4x4_ret.block(0, 0, 3, 3);
cout << "m3x3_to ret is: \n" << m3x3_ret << std::endl; 将旋转矩阵变为欧拉角便于观察:
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d &R)
{
assert(isRotationMatirx(R));
double sy = sqrt(R(0,0) * R(0,0) + R(1,0) * R(1,0));
bool singular = sy < 1e-6;
double x, y, z;
if (!singular){
x = atan2( R(2,1), R(2,2));
y = atan2(-R(2,0), sy);
z = atan2( R(1,0), R(0,0));
}else{
x = atan2(-R(1,2), R(1,1));
y = atan2(-R(2,0), sy);
z = 0;
}
return {x, y, z};
}将上述组合,构建一个自己的myPoseTrans函数:
/**
* @brief myPoseTrans
* @param pose_from 起始位姿(空间向量)
* @param pose_from_to 相对于起始位姿的姿态变化(空间向量)
* @return 结果位姿 (空间向量)
*/
std::vectormyPoseTrans(const std::vector&pose_from,
const std::vector&pose_from_to)
{
std::vector pose;
// 初始化欧拉角(rpy),对应绕x轴,绕y轴,绕z轴的旋转角度
Eigen::Vector3d euler_angle(pose_from.at(3) * DEG_TO_ARC,
pose_from.at(4) * DEG_TO_ARC,
pose_from.at(5) * DEG_TO_ARC);
// 使用Eigen库将欧拉角转换为旋转矩阵
Eigen::Matrix3d rotation_matrix1;
rotation_matrix1 = Eigen::AngleAxisd(euler_angle[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle[0], Eigen::Vector3d::UnitX());
Eigen::MatrixXd pos(3,1);
pos(0,0)= pose_from.at(0);
pos(1,0)= pose_from.at(1);
pos(2,0)= pose_from.at(2);
Eigen::MatrixXd homogeneous(1,4);
homogeneous(0,0)=0;
homogeneous(0,1)=0;
homogeneous(0,2)=0;
homogeneous(0,3)=1;
Eigen::Matrix <double, </double,3, 4> m3x4;
Eigen::Matrix <double, </double,4, 4> m4x4;
m3x4 << rotation_matrix1, pos;
cout << "m3x4 is :\n" << m3x4 << std::endl;// np.concatenate((a,b))
m4x4 << m3x4, homogeneous;
cout << "m4x4 is: \n" <
Eigen::MatrixXd pos_to(3,1);
pos_to(0,0)= pose_from_to.at(0);
pos_to(1,0)= pose_from_to.at(1);
pos_to(2,0)= pose_from_to.at(2);
// 转化为弧度
Eigen::Vector3d euler_angle_to(pose_from_to.at(3) * DEG_TO_ARC,
pose_from_to.at(4) * DEG_TO_ARC,
pose_from_to.at(5) * DEG_TO_ARC);
// 使用Eigen库将欧拉角转换为旋转矩阵
Eigen::Matrix3d rotation_matrix1_to;
rotation_matrix1_to = Eigen::AngleAxisd(euler_angle_to[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle_to[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle_to[0], Eigen::Vector3d::UnitX());
Eigen::Matrix <double, </double,3, 4> m3x4_to;
Eigen::Matrix <double, </double,4, 4> m4x4_to;
Eigen::Matrix <double, </double,4, 4> m4x4_ret;
m3x4_to << rotation_matrix1_to, pos_to;
cout << "m3x4_to is :\n" << m3x4_to << std::endl;// np.concatenate((a,b))
m4x4_to << m3x4_to, homogeneous;
m4x4_ret = m4x4*m4x4_to;
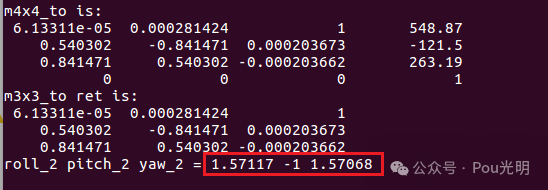
cout << "m4x4_to is: \n" << m4x4_ret << std::endl;
Eigen::Matrix <double, </double,3, 3> m3x3_ret = m4x4_ret.block(0, 0, 3, 3);
cout << "m3x3_to ret is: \n" << m3x3_ret << std::endl;
// 使用自定义函数将旋转矩阵转换为欧拉角
Eigen::Vector3d eulerAngle2 = rotationMatrixToEulerAngles(m3x3_ret); // roll,pitch,yaw
cout << "roll_2 pitch_2 yaw_2 = " << eulerAngle2[0] << " " << eulerAngle2[1]
<< " " << eulerAngle2[2] << endl << endl;
pose.push_back(m4x4_ret(0,3));
pose.push_back(m4x4_ret(1,3));
pose.push_back(m4x4_ret(2,3));
pose.push_back(eulerAngle2[0]*ARC_TO_DEG);
pose.push_back(eulerAngle2[1]*ARC_TO_DEG);
pose.push_back(eulerAngle2[2]*ARC_TO_DEG);
return pose;
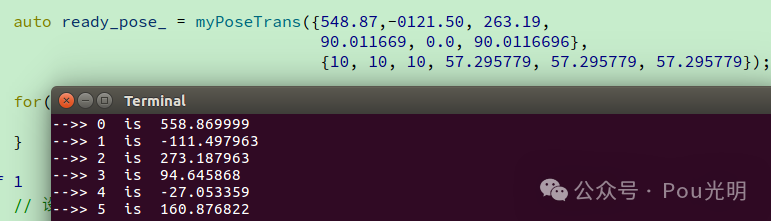
}我的计算结果:
其他测试数据:
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-06-12,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号