课前准备----10X HD数据基础分析
原创
课前准备----10X HD数据基础分析
原创
追风少年i
发布于 2024-08-14 11:16:08
发布于 2024-08-14 11:16:08
作者,Evil Genius
现在我们的课程来到HD的分析阶段了。
重要的放前面,为了提高下游分析的灵敏度和精度,建议使用SpotClean调整spot swapping,这有助于减少由于附近点的bleed导致的点交换污染,从而提高分析的准确性。
spotclean课上已经讲过,需要引起大家的重视。
10X HD默认输出8um、16um bin数据,如果需要调整,比如调整到20 um的精度,需要用到参数

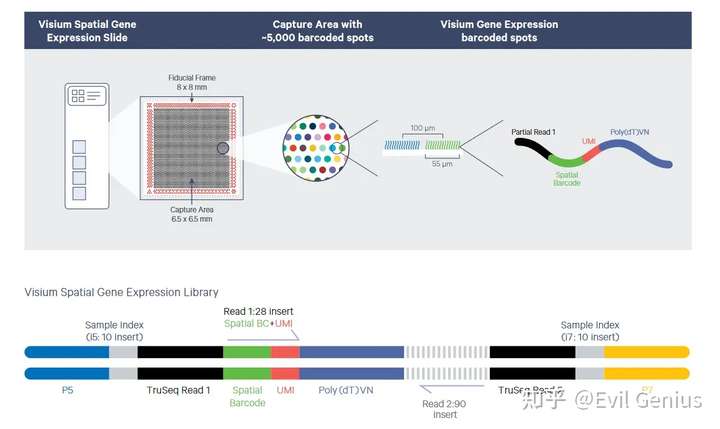
visium的捕获策略。
HD的捕获策略
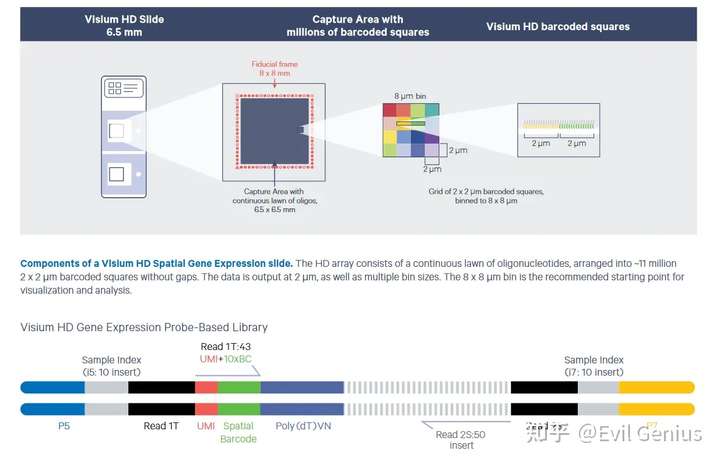
大家能找到其中所有的不同吗?
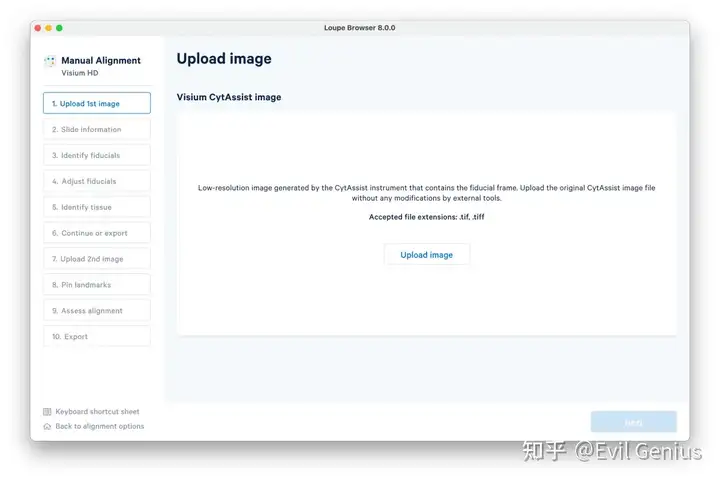
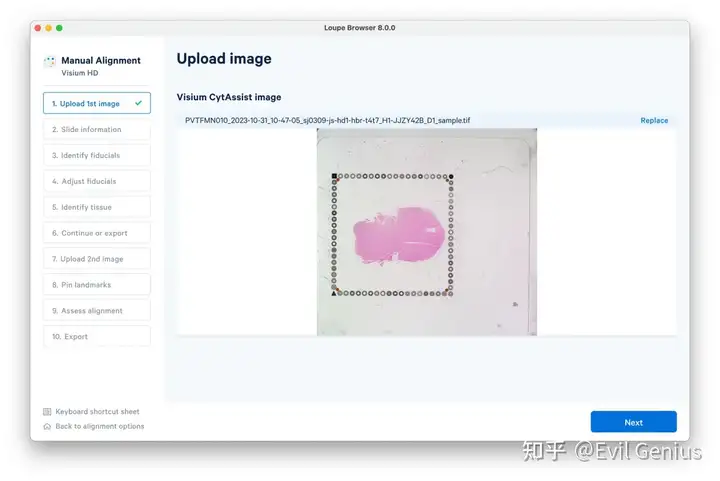
Space Ranger分析HD数据的前准备,图像校准
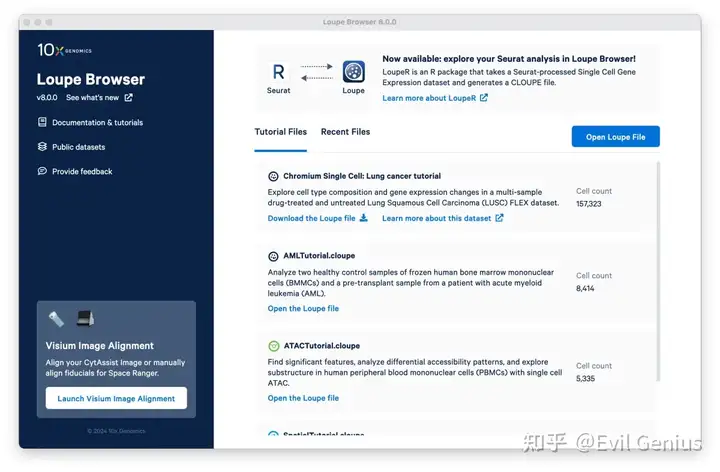
选择Visium HD Manual Alignment

上传图片(注意这是cytoassist生成的图片,非常大)
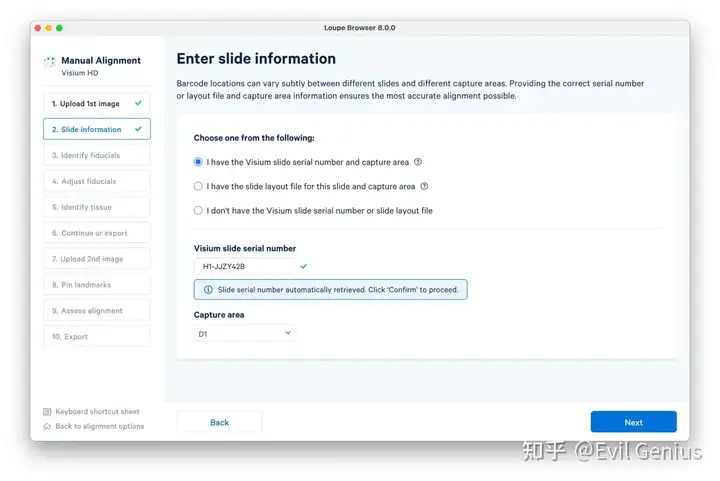
选择芯片信息
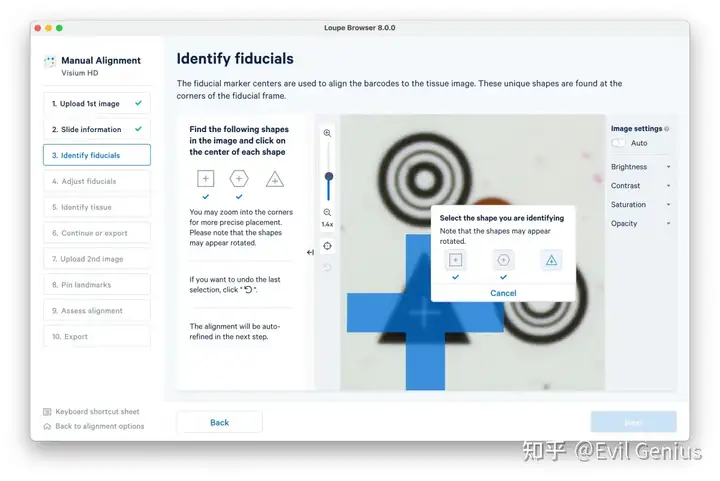
确定锚点
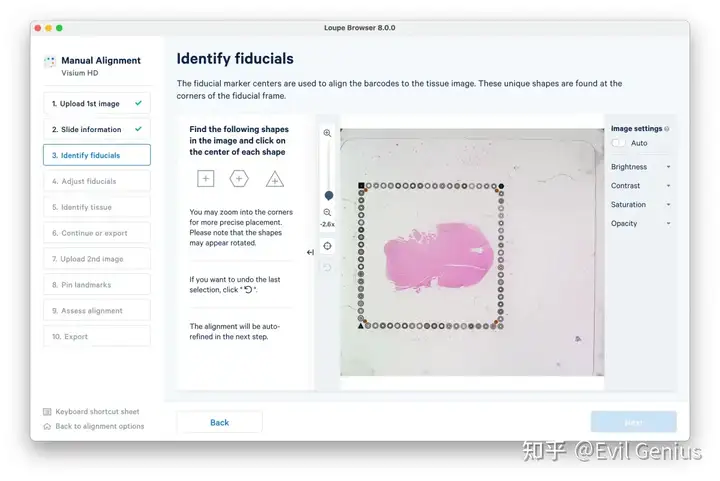
识别核心的三个锚点
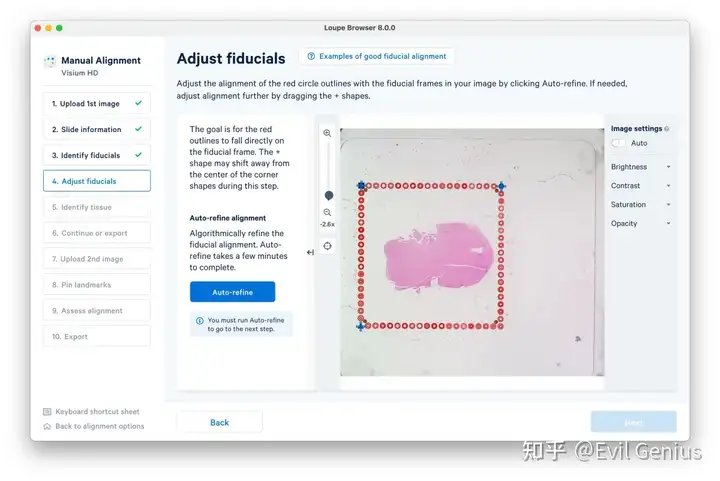
调整基准点
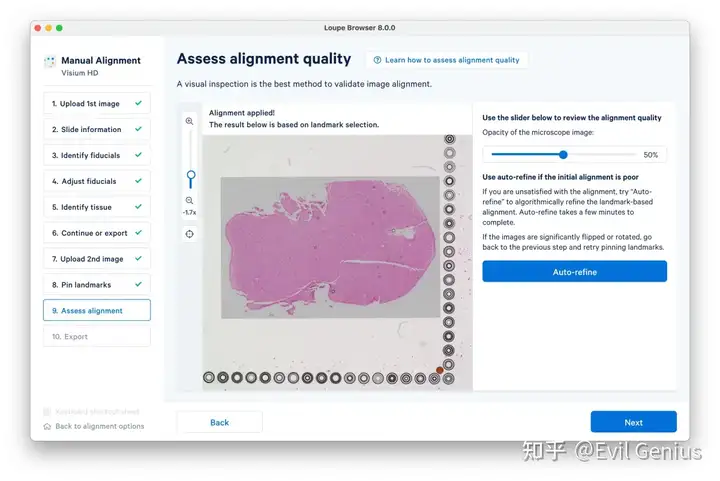
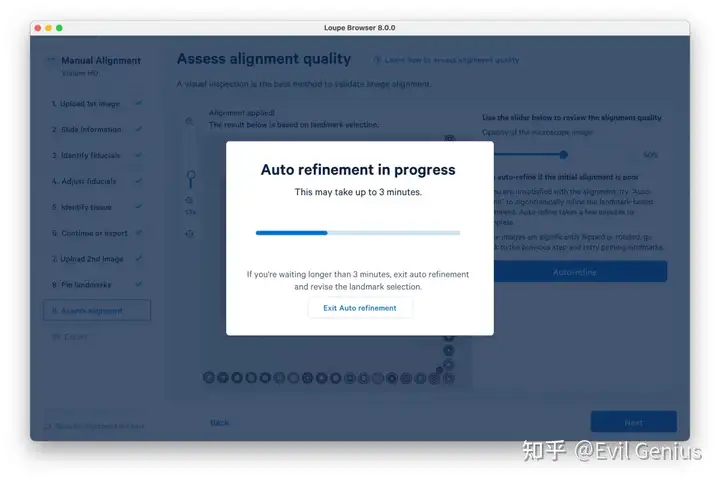
Click Auto-refine to algorithmically refine the alignment
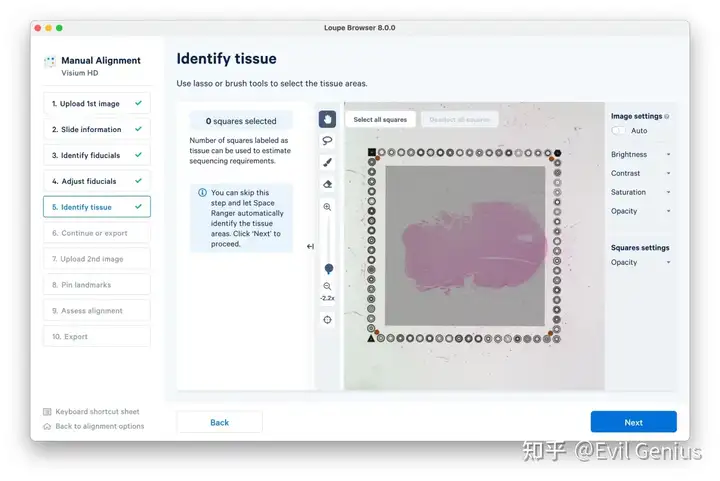
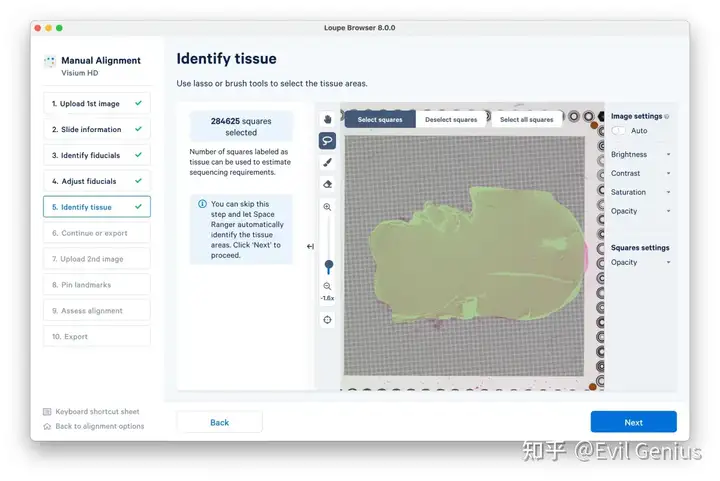
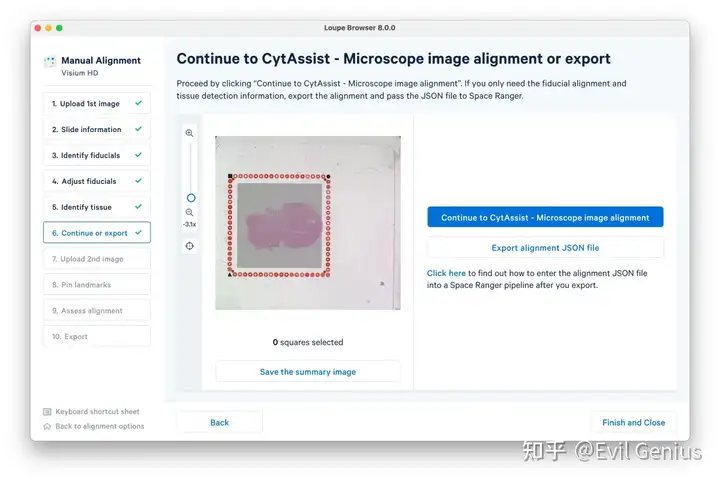
划分区域
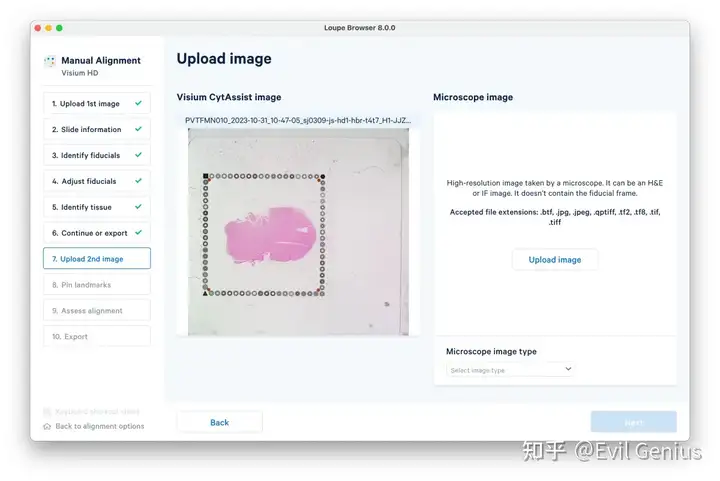
继续Microscope图像比对
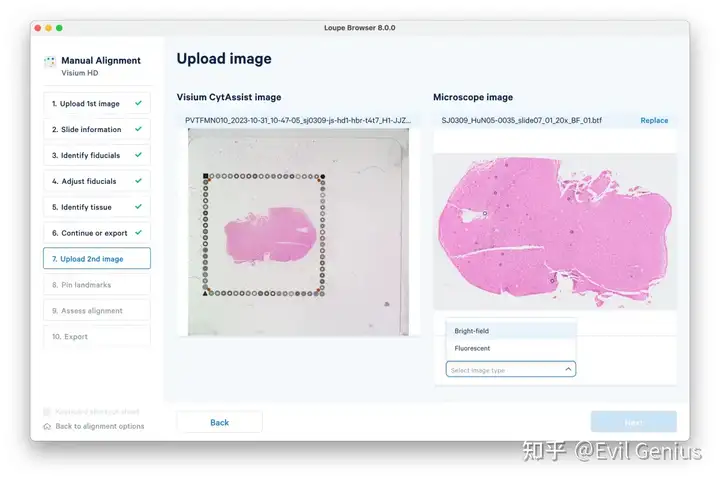
Upload the high-resolution microscope image (H&E or IF)(非常大)
For H&E images, as in this case, select brightfield.
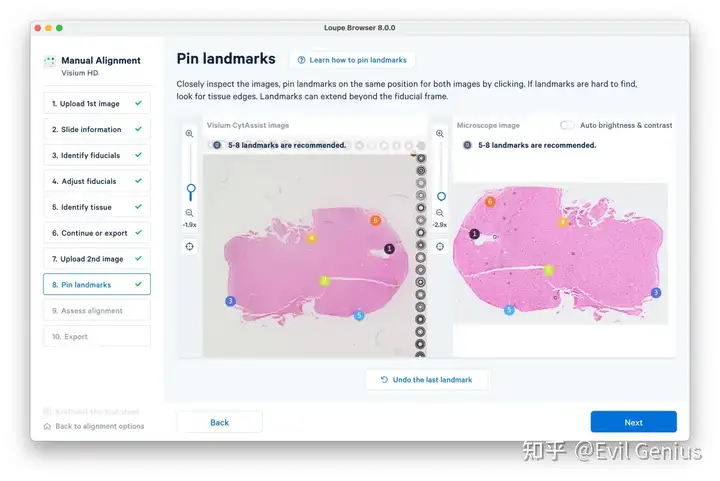
标记landmarks
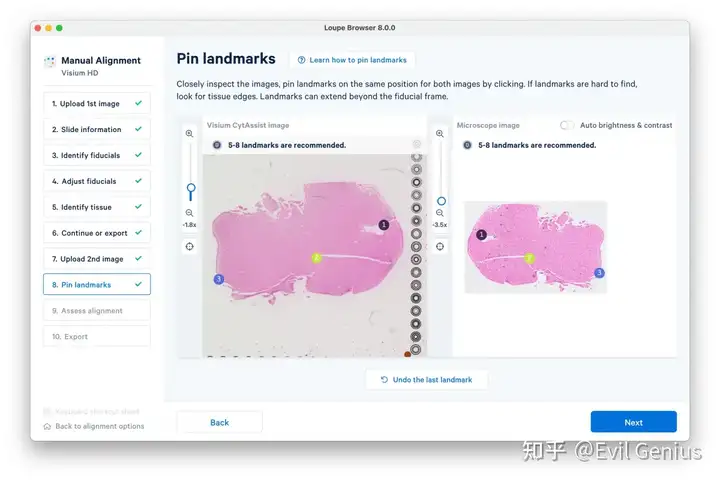
确保准确度

通常情况需要设置5-8个标记
评估匹配度
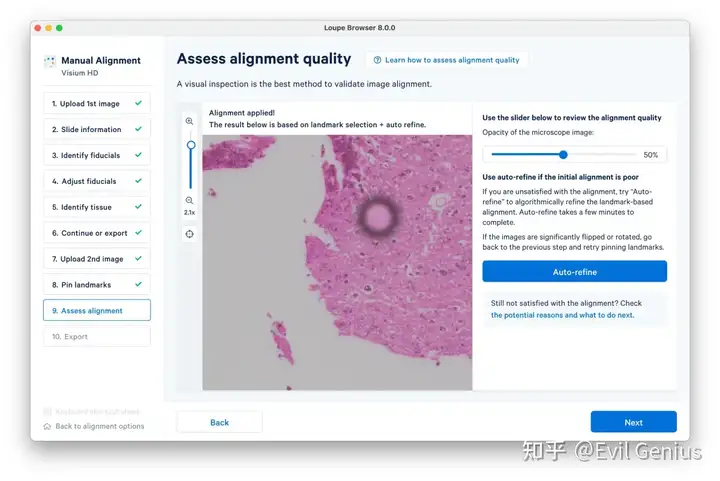
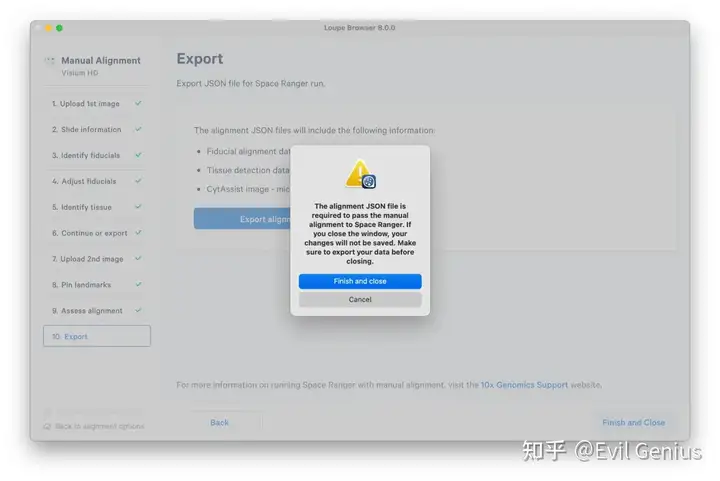
输出比对文件
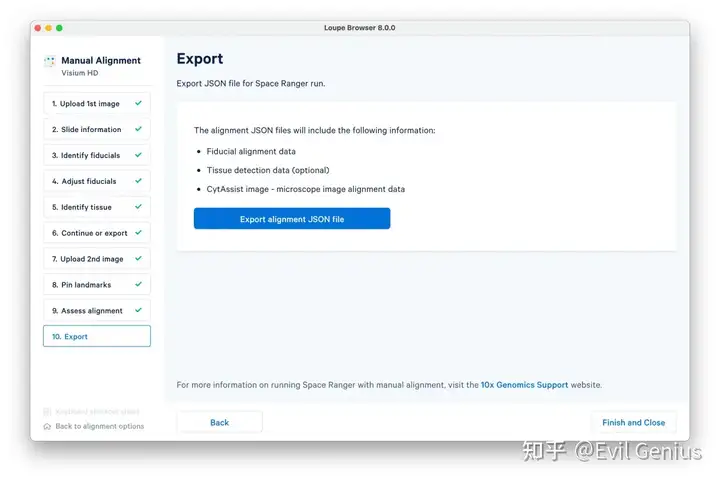
结束
进行数据分析
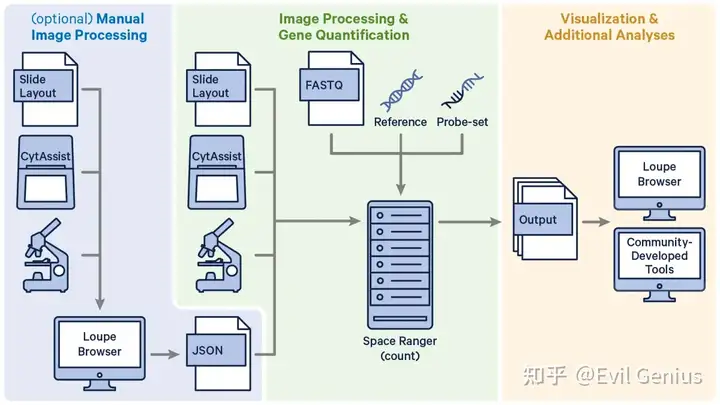
输入文件
1、CytAssist image in
TIFFformat 2、

3、芯片信息

4、参考基因组 5、探针列表 6、图像校准的json文件
代码示例
spaceranger count --id=hd_count \
--transcriptome=/path/to/refdata-gex-GRCh38-2020-A \
--fastqs=/path/to/fastq \
--probe-set=/path/to/Visium_Human_Transcriptome_Probe_Set_v2.0_GRCh38-2020-A.csv \
--slide=H1-YD7CDZK \
--area=A1 \
--cytaimage=/path/to/CAVG10539_2023-11-16_14-56-24_APPS115_H1-YD7CDZK_A1_S11088.tif \
--image=/path/to/APPS115_11088_rescan_01.btf \
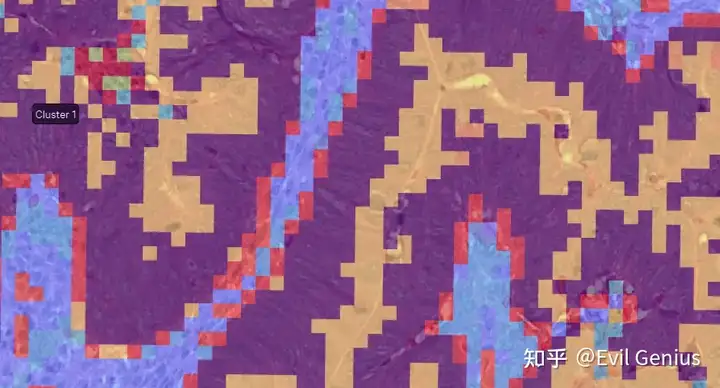
--create-bam=false生成的loupe文件示例

放大后,默认8um精度
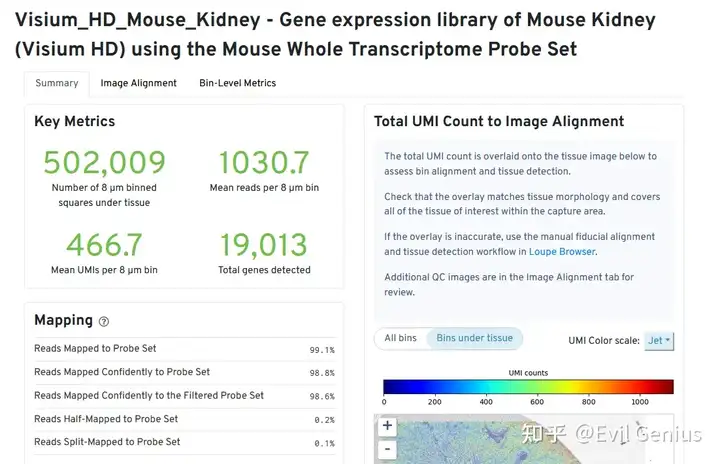
网页报告

生活很好,有你更好
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号