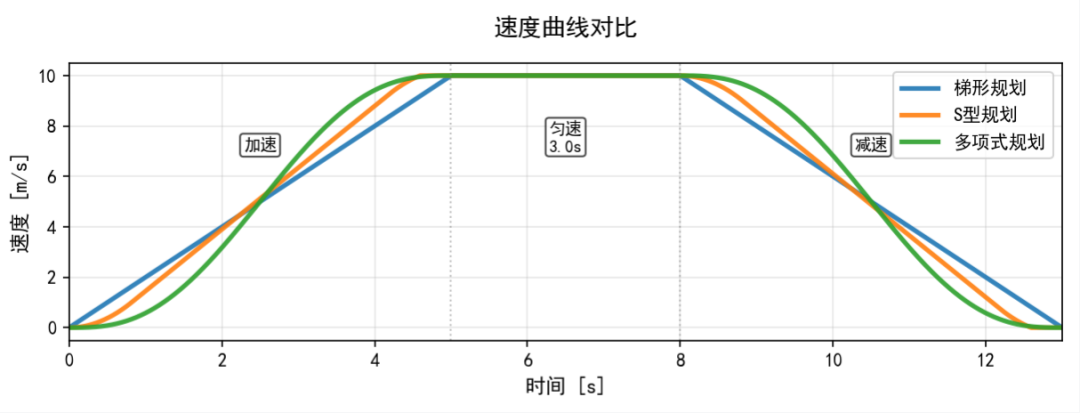
三大主流速度规划方法对比


方法一:梯形速度规划(基础但生硬)
- 原理:如同它的名字,速度曲线呈“梯形”。过程是:匀加速 → 匀速 → 匀减速。
- 优点:计算极其简单,对控制器要求低。
- 致命缺点:在加速开始、结束以及转向匀速的瞬间,加速度会发生跳变(想象一下瞬间推一把或拉一把)。这种力的突变就是机械臂抖动和异响的元凶。
- 适用:仅适用于对平滑性要求极低的低速场合。
方法二:S型速度规划(高速高精的首选)
- 原理:在梯形规划基础上,对加速度的变化率(Jerk) 进行约束,让加速度也能“斜坡式”地增大或减小,从而变得连续。
- 核心价值:速度曲线呈柔和的“S”形,加速度曲线是平滑的梯形。从根本上消除了刚性冲击,大幅减少残余振动。
- 调参关键:加加速度(Jerk) 的限值。调小它,运动更柔和;调大它,响应更迅速但可能更“冲”。这是调试手感的“灵魂参数”。
- 适用:几乎所有要求高速、高精度、低振动的场景,如精密装配、快速分拣、激光切割等。
方法三:多项式规划(灵活但复杂)
- 原理:使用高阶多项式函数(如3-5-3、4-3-4多项式)来拟合整个运动过程。
- 优点:极其灵活,可以精确设定起点和终点的位置、速度、加速度等多个边界条件。
- 缺点:在线计算量大,对控制器性能要求高,且参数选择不当可能导致曲线超调。
- 适用:需要与动力学状态(例如力控交互)进行复杂对接的特殊场合。
上面图形的绘制代码如下:
import numpy as np
import matplotlib.pyplot as plt
# ----------------------
# 基本参数
# ----------------------
v0 = 0.0 # 初速度
a_max = 2.0 # 最大加速度
v_max = 10.0 # 最大速度
t_acc = v_max / a_max # 加速到最大速度的时间 = 5s
t_keep = 3.0 # 保持时间
T = t_acc + t_keep + t_acc # 总时间 = 13s
dt = 0.001
t = np.arange(0, T + dt, dt)
# ----------------------
# 1. 梯形速度规划
# ----------------------
def trapezoid_velocity(t, v0, a_max, v_max, T):
t_acc = v_max / a_max # 加速时间
t_dec_start = T - t_acc # 减速开始时间
v = np.zeros_like(t)
for i, ti in enumerate(t):
if ti <= t_acc:
# 匀加速段
v[i] = v0 + a_max * ti
elif ti >= t_dec_start:
# 匀减速段(对称)
tau = T - ti
v[i] = v0 + a_max * tau
else:
# 匀速段
v[i] = v_max
return v
v_trap = trapezoid_velocity(t, v0, a_max, v_max, T)
# ----------------------
# 2. S型速度规划(7段式,简化实现)
# ----------------------
def s_curve_velocity_simple(t, v0, v_max, a_max, T, t_acc, t_keep):
"""
简化的S型速度规划
确保:起点速度=0,终点速度=0,中间匀速段时间=t_keep
"""
# 设置加加速度(控制平滑度)
j_max = 2.5 # 加加速度,可调节
# 计算各段时间(对称结构)
# 加加速阶段时间(达到最大加速度)
Tj = min(t_acc / 2, np.sqrt(a_max / j_max))
# 加加速阶段能达到的最大加速度
a_lim = j_max * Tj
# 加速段总时间 = 加加速 + 匀加速 + 减加速
# 实际上我们固定总加速时间 = t_acc,所以匀加速时间 = t_acc - 2*Tj
Ta = t_acc # 总加速时间
# 计算各段实际时间
t1 = Tj # 加加速结束时间
t2 = Ta - Tj # 匀加速结束时间(也是减加速开始时间)
t3 = Ta # 加速段结束时间
# 匀速段开始和结束时间
t4 = Ta + t_keep # 匀速段结束时间
t5 = t4 + Tj # 加减速结束时间
t6 = T - Tj # 匀减速结束时间
t7 = T # 总时间
v = np.zeros_like(t)
for i, ti in enumerate(t):
if ti <= t1:
# 1. 加加速段
v[i] = 0.5 * j_max * ti**2
elif ti <= t2:
# 2. 匀加速段
tau = ti - t1
v[i] = 0.5 * j_max * t1**2 + a_lim * tau
elif ti <= t3:
# 3. 减加速段
tau = ti - t2
v[i] = 0.5 * j_max * t1**2 + a_lim * (t2 - t1) + a_lim * tau - 0.5 * j_max * tau**2
elif ti <= t4:
# 4. 匀速段
v[i] = v_max
elif ti <= t5:
# 5. 加减速段(开始减速)
tau = ti - t4
v[i] = v_max - 0.5 * j_max * tau**2
elif ti <= t6:
# 6. 匀减速段
tau = ti - t5
v[i] = v_max - 0.5 * j_max * (t5 - t4)**2 - a_lim * tau
elif ti <= t7:
# 7. 减减速段
tau = ti - t6
v[i] = v_max - 0.5 * j_max * (t5 - t4)**2 - a_lim * (t6 - t5) - a_lim * tau + 0.5 * j_max * tau**2
else:
v[i] = 0
# 确保速度不超过v_max且最终为0
v = np.clip(v, 0, v_max)
v[-1] = 0
return v
v_s = s_curve_velocity_simple(t, v0, v_max, a_max, T, t_acc, t_keep)
# ----------------------
# 3. 多项式速度规划(5次多项式)
# ----------------------
def polynomial_velocity_simple(t, v0, v_max, T, t_acc, t_keep):
"""
简化的5次多项式速度规划
确保:起点速度=0,终点速度=0,中间匀速段时间=t_keep
"""
# 时间分段点
t1 = t_acc # 加速结束
t2 = t_acc + t_keep # 匀速结束/减速开始
v = np.zeros_like(t)
for i, ti in enumerate(t):
if ti <= t1:
# 加速段:0 → t1,使用5次多项式
# v(t) = v_max * (10τ^3 - 15τ^4 + 6τ^5),其中 τ = t/t1
τ = ti / t1
v[i] = v_max * (10 * τ**3 - 15 * τ**4 + 6 * τ**5)
elif ti <= t2:
# 匀速段
v[i] = v_max
else:
# 减速段:t2 → T,使用对称的5次多项式
# τ = (T - t) / t_acc,注意时间方向
τ = (T - ti) / t_acc
v[i] = v_max * (10 * τ**3 - 15 * τ**4 + 6 * τ**5)
# 确保终点速度为0
v[-1] = 0
return v
v_poly = polynomial_velocity_simple(t, v0, v_max, T, t_acc, t_keep)
# ----------------------
# 4. 计算加速度曲线
# ----------------------
def calculate_acceleration(v, dt):
"""通过中心差分法计算加速度"""
a = np.zeros_like(v)
a[1:-1] = (v[2:] - v[:-2]) / (2 * dt)
a[0] = (v[1] - v[0]) / dt
a[-1] = (v[-1] - v[-2]) / dt
return a
# 计算三种规划的加速度
a_trap = calculate_acceleration(v_trap, dt)
a_s = calculate_acceleration(v_s, dt)
a_poly = calculate_acceleration(v_poly, dt)
# ----------------------
# 5. 可视化对比
# ----------------------
plt.rcParams['font.sans-serif'] = ['SimHei', 'Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# 创建子图
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
# 5.1 速度曲线对比
ax1 = axes[0, 0]
ax1.plot(t, v_trap, label='梯形规划', color='#1f77b4', linewidth=2.5, alpha=0.9)
ax1.plot(t, v_s, label='S型规划', color='#ff7f0e', linewidth=2.5, alpha=0.9)
ax1.plot(t, v_poly, label='多项式规划', color='#2ca02c', linewidth=2.5, alpha=0.9)
ax1.set_title('速度曲线对比', fontsize=13, fontweight='bold', pad=15)
ax1.set_xlabel('时间 [s]', fontsize=11)
ax1.set_ylabel('速度 [m/s]', fontsize=11)
ax1.grid(True, alpha=0.3)
ax1.legend(fontsize=10, loc='upper right')
ax1.set_xlim([0, T])本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-01-27,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号