【Multi-UAV】多无人机实现凸多边形区域覆盖--Voronoi分割

【Multi-UAV】多无人机实现凸多边形区域覆盖--Voronoi分割

不去幼儿园
发布于 2024-12-03 13:17:07
发布于 2024-12-03 13:17:07
本篇文章是博主多无人机研究和强化学习RL领域学习时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在多无人机研究专栏: 【多无人机研究】(1)---《多无人机实现凸多边形区域覆盖--Voronoi分割》
多无人机实现凸多边形区域覆盖--Voronoi分割
0.介绍
在多无人机(multi-UAV)实现凸多边形区域覆盖的问题中,通常涉及到多个无人机在给定的区域内有效地进行任务分配和路径规划,以最大化覆盖效率和最小化资源消耗(如时间和能量)。虽然强化学习方法在近年来得到了越来越多的关注,但仍有许多非强化学习的方法和案例可以用于解决该问题。
1.非强化学习方法和案例
- 基于启发式和贪心算法的方法 许多研究使用启发式方法,如最小生成树(Minimum Spanning Tree, MST)和贪心算法来进行路径规划。例如,可以通过构建多边形区域的Delaunay三角剖分,生成最小生成树来规划覆盖路径。这种方法通常用于简化问题,使得路径规划在多边形区域内更为高效。
- 分区策略 将区域分割为若干个较小的子区域,每个子区域由一架或多架无人机进行覆盖。常用的分区策略包括Voronoi分割和基于几何特征的分割。在凸多边形区域内,Voronoi分割可以确保每个子区域的无人机覆盖路径最短,并且减少了重叠覆盖的区域。
- 基于线性规划和整数规划的方法 使用线性规划(Linear Programming, LP)或整数规划(Integer Programming, IP)的方法来优化覆盖路径。这些方法通过建立目标函数(如最小化总覆盖时间或能量消耗)和约束条件(如无人机的航程和覆盖能力)来求解最优路径和任务分配。
- 基于虚拟势场的方法 虚拟势场法(Virtual Potential Field Method)是一种基于物理模型的路径规划算法,通过引入吸引力和排斥力来引导无人机朝目标区域移动,同时避免与其他无人机或障碍物碰撞。这种方法可以在动态环境中快速响应变化,但容易陷入局部最优解。
- 基于遗传算法和蚁群优化的进化算法 遗传算法(Genetic Algorithm, GA)和蚁群优化(Ant Colony Optimization, ACO)等进化算法常用于求解复杂的多目标优化问题。这些算法模拟自然进化或群体行为来搜索最优解,可以用于解决多无人机的路径规划和任务分配问题。
2.案例
- 使用Voronoi分割进行多无人机区域覆盖 一些研究使用Voronoi分割来进行多无人机覆盖。例如,在凸多边形区域内首先生成Voronoi图,然后每架无人机覆盖其对应的Voronoi区域,这样可以有效减少路径重叠并最大化覆盖效率。
- 基于线性规划的多无人机路径优化 一些研究利用线性规划模型来优化无人机的覆盖路径和任务分配。例如,研究者建立了一个目标函数,最小化所有无人机的总覆盖路径长度,约束条件包括每个无人机的最大航程和区域覆盖要求。通过求解线性规划模型,可以得到最优的路径规划方案。
- 虚拟势场法在动态环境中的应用 虚拟势场法在多无人机动态覆盖问题中的应用主要体现在应对不确定的环境因素,例如风力变化、动态障碍物等。这种方法允许无人机根据环境变化自动调整路径,具有较好的适应性。
- 基于遗传算法的无人机覆盖优化 遗传算法被用于优化无人机的覆盖路径,例如在一个凸多边形区域内,通过多代进化选择最优路径。研究表明,遗传算法能够在大规模多无人机覆盖任务中提供高效的近似最优解。
3.Voronoi分割进行多无人机区域覆盖
使用Voronoi分割进行多无人机区域覆盖是一种常见的策略,能够有效减少多架无人机之间的路径重叠,最大化覆盖效率。Voronoi分割的基本思想是将一个区域分割为若干个子区域,使得每个子区域的所有点到某个无人机的距离都比到其他无人机的距离近。这种分割方式可以确保每架无人机在其对应的子区域内进行任务,从而减少覆盖的冗余度和时间。
4.Voronoi分割在多无人机覆盖中的实现步骤
- 初始化无人机位置: 首先,需要确定所有无人机的初始位置(通常是起飞位置)。这些位置将作为Voronoi分割的种子点(seed points)。每个无人机的初始位置即是其控制的子区域的生成中心。
- 计算Voronoi图: 利用这些无人机位置,基于Voronoi分割算法生成整个区域的Voronoi图。Voronoi图将给定的凸多边形区域划分为若干个子区域,每个子区域的所有点距离其所属的无人机最近。
具体地:
- 对于一个点 (p) 在区域内,如果它到某个无人机的距离小于到其他无人机的距离,则该点属于该无人机的Voronoi区域。
- 凸多边形区域被划分为多个子多边形,每个子多边形是一个Voronoi单元。
- 任务分配: 一旦完成了Voronoi分割,每个子区域由对应的无人机进行覆盖。无人机在其Voronoi区域内进行路径规划和任务执行。由于Voronoi分割保证了每个无人机只负责覆盖距离其最近的区域,减少了冗余的重复覆盖。
- 路径规划: 在每个Voronoi单元内部,进行局部路径规划。常见的路径规划算法包括覆盖扫面算法(如Lawnmower或Zigzag算法)。这些算法确保无人机在其指定区域内高效地进行覆盖。
- Lawnmower算法:无人机沿着平行线覆盖其负责的区域,类似于割草机的工作原理。
- Zigzag算法:无人机沿锯齿形路径覆盖区域,适用于长条形的Voronoi区域。
- 动态调整: 如果无人机由于某种原因(例如电量不足或任务变化)无法完成其区域的任务,可以通过调整Voronoi图来重新分配任务。这种动态调整可以通过实时更新无人机的当前位置和状态,然后重新生成Voronoi图。
- 边界处理: 对于凸多边形区域的边界,需要确保无人机的覆盖不会超过边界或者导致无法到达的区域。在这种情况下,可以引入边界约束,将多边形外的区域排除出Voronoi分割。
5.Voronoi分割实例分析
假设有一个凸多边形区域,内部有4架无人机进行覆盖:
- 步骤1:初始化无人机位置 假设这4架无人机的初始位置分别为 ((x_1, y_1)), ((x_2, y_2)), ((x_3, y_3)), ((x_4, y_4)),这些点作为Voronoi分割的生成点。
- 步骤2:计算Voronoi图 基于初始位置生成Voronoi图,将整个区域分为5个子区域,每个区域与其对应的无人机最接近。
- 步骤3:任务分配 每架无人机负责覆盖其对应的Voronoi区域。例如,无人机1负责其最近的区域,而无人机2负责另一个不同的区域。由于Voronoi分割确保了每个无人机覆盖的区域是非重叠的,减少了重复覆盖。
- 步骤4:路径规划 在各自的区域内,每架无人机执行Lawnmower算法进行覆盖。例如,无人机1从其Voronoi区域的左上角开始,逐行覆盖整个区域。
- 步骤5:动态调整 如果无人机1由于某种原因需要提前离开或无法完成任务,系统可以通过更新其余无人机的Voronoi区域,使得无人机2接管一部分无人机1的任务区域,从而确保整个区域仍能被完全覆盖。
6.Voronoi分割的优势
- 减少路径重叠: Voronoi分割确保每个无人机的覆盖区域是唯一的,因此避免了多个无人机重复覆盖同一片区域,提升了整体覆盖效率。
- 适应性强: 这种方法可以根据无人机的实际位置动态调整分割结果,特别适用于动态环境和任务分配。
- 可扩展性好: Voronoi分割可以轻松扩展到更多无人机和更复杂的区域,通过增加分割的种子点,能够处理大规模多无人机覆盖任务。
相关挑战
- 区域的非均匀性: 如果凸多边形区域内存在障碍物或复杂地形,Voronoi分割可能无法直接适用,需要结合其他方法对结果进行调整。
- 边界效应: 在处理复杂边界的多边形时,Voronoi单元可能会部分位于区域外部,因此需要对其进行剪裁和调整。
7.总结
在多无人机实现凸多边形区域覆盖的问题中,非强化学习的方法具有多样性和灵活性,涵盖了启发式算法、优化算法、进化算法等。选择具体的方法取决于任务的复杂性、实时性要求以及计算资源的限制。在实际应用中,这些方法也往往结合使用,以获得更好的覆盖效果和更高的效率。
Voronoi分割在多无人机凸多边形区域覆盖中是一种有效的工具。它通过对区域进行合理的划分,确保每架无人机负责其对应的子区域,减少了重复覆盖,提高了任务效率。这种方法特别适合在静态环境中进行初步分配,也可以通过动态更新应对变化。
[Python] Voronoi分割实现
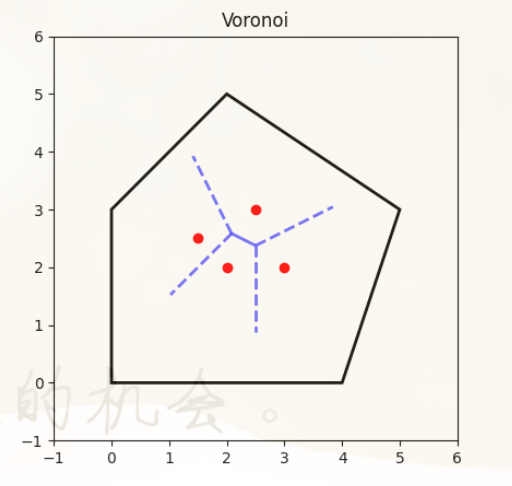
以下是一个简单的Python实现,使用scipy.spatial模块中的Voronoi分割来处理四架无人机在一个五边形区域内的区域覆盖。假设无人机初始位置处于多边形区域的内部。我们还会使用matplotlib来进行可视化展示。
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial import Voronoi, voronoi_plot_2d
from matplotlib.patches import Polygon
# 定义五边形区域的顶点
polygon = np.array([[0, 0], [4, 0], [5, 3], [2, 5], [0, 3]])
# 定义无人机的初始位置(假设在五边形的中心附近)
drone_positions = np.array([[2, 2], [3, 2], [2.5, 3], [1.5, 2.5]])
# 计算Voronoi分割
vor = Voronoi(drone_positions)
# 绘制五边形区域
fig, ax = plt.subplots()
polygon_patch = Polygon(polygon, closed=True, fill=None, edgecolor='black', linewidth=2)
ax.add_patch(polygon_patch)
# 绘制Voronoi分割
voronoi_plot_2d(vor, ax=ax, show_vertices=False, line_colors='blue', line_width=2, line_alpha=0.6, point_size=10)
# 绘制无人机位置
ax.scatter(drone_positions[:, 0], drone_positions[:, 1], color='red', zorder=5)
# 设置绘图范围
ax.set_xlim([-1, 6])
ax.set_ylim([-1, 6])
# 裁剪Voronoi单元,使其不超过五边形的边界
# (此步骤需要进一步复杂的实现,简单起见,这里我们只展示未裁剪的Voronoi图)
plt.gca().set_aspect('equal', adjustable='box')
plt.title("Voronoi")
plt.show()[Results] 运行结果
文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2024-12-03,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号