自我具身模型 概述

(翻译后4.6万字,供参考)
The radically embodied conscious cybernetic bayesian brain: from free energy to free will and back again
关键词:自由能原理;主动推理;贝叶斯大脑;生成模型;控制论;实施例;行动主义;认知主义;陈述;意识;自由意志;心理因果关系;认知情感发展;情绪;情怀;准备潜力;意向性;机构;智力
Keywords:
Free Energy Principle; active inference; Bayesian brain; generative models;
cybernetics; embodiment; enactivism; cognitivism; representations; consciousness; free will; mental causation;
cognitive-affective development; emotions; feelings; readiness potentials; intentionality;
agency; intelligence
Abstract:
Drawing from both enactivist and cognitivist perspectives on mind, I propose that explaining teleological phenomena may require reappraising both “Cartesian theaters” and mental homunculi in terms of embodied self-models (ESMs), understood as body maps with agentic properties, functioning as predictive-memory systems and cybernetic controllers. Quasi-homuncular ESMs are suggested to constitute a major organizing principle for neural architectures due to their initial and ongoing significance for solutions to inference problems in cognitive (and affective) development.
Embodied experiences provide foundational lessons in learning curriculums in which agents explore increasingly challenging problem spaces, so answering an unresolved question in Bayesian cognitive science: what are biologically plausible mechanisms for equipping learners with sufficiently powerful inductive biases to adequately constrain inference spaces? Drawing on models from neurophysiology, psychology, and developmental robotics, I describe how embodiment provides fundamental sources of empirical priors (as reliably learnable posterior expectations).
If ESMs play this kind of foundational role in cognitive development, then bidirectional linkages will be found between all sensory modalities and frontal-parietal control hierarchies, so infusing all senses with somatic-motoric properties, thereby structuring all perception by relevant affordances, so solving frame problems for embodied agents.
Drawing upon the Free Energy Principle and Active Inference framework, I describe a particular mechanism for intentional action selection via consciously imagined (and explicitly represented) goal realization, where contrasts between desired and present states influence ongoing policy selection via predictive coding mechanisms and backward-chained imaginings (as self-realizing predictions).
This embodied developmental legacy suggests a mechanism by which imaginings can be intentionally shaped by (internalized) partially-expressed motor acts, so providing means of agentic control for attention, working memory, imagination, and behavior.
I further describe the nature(s) of mental causation and self-control, and also provide an account of readiness potentials in Libet paradigms wherein conscious intentions shape causal streams leading to enaction.
Finally, I provide neurophenomenological handlings of prototypical qualia including pleasure, pain, and desire in terms of self-annihilating free energy gradients via quasi-synesthetic interoceptive active inference.
In brief, this manuscript is intended to illustrate how radically embodied minds may create foundations for intelligence (as capacity for learning and inference), consciousness (as somatically-grounded self-world modeling), and will (as deployment of predictive models for enacting valued goals).
Abstract:
从生成主义和认知主义对心灵的观点出发,我提出,解释目的论现象可能需要根据具身自我模型(ESM)重新评估“笛卡尔剧场”和心理侏儒,将其理解为具有能动属性的身体地图。关系,充当预测记忆系统和控制论控制器。准同体 ESM被认为构成神经结构的主要组织原则,因为它们对于解决认知(和情感)发展中的推理问题具有最初和持续的意义。具身经验为学习课程提供了基础课程,在课程中,主体探索越来越具有挑战性的问题空间,因此回答了贝叶斯认知科学中一个未解决的问题:为学习者配备足够强大的归纳偏差以充分限制推理空间的生物学上合理的机制是什么?借鉴神经生理学、心理学和发育机器人学的模型,我描述了具体化如何提供经验先验的基本来源(作为可靠的可学习的后验期望)。如果 ESM 在认知发展中发挥这种基础作用,那么所有感觉模式和额叶‑顶叶控制层次之间就会发现双向联系,从而为所有感觉注入躯体运动特性,从而通过相关的可供性来构建所有感知,因此解决具体代理的框架问题。利用自由能原理和主动推理框架,我描述了一种通过有意识想象(并明确表示)目标实现来进行有意行动选择的特殊机制,其中期望状态和当前状态之间的对比通过预测编码机制和后向链接影响正在进行的政策选择想象(作为自我实现的预测)。这种具体化的发展遗产表明了一种机制,通过这种机制,想象可以通过(内化的)部分表达的运动行为来有意地塑造,从而提供对注意力、工作记忆、想象力和行为的代理控制手段。我进一步描述了心理因果关系和自我控制的本质,并提供了Libet 范式中准备潜力的说明,其中意识意图塑造了导致行动的因果流。最后,我通过准联觉内感受主动推理,以自毁自由能梯度的形式提供了对原型感受性的神经现象学处理,包括快乐、痛苦和欲望。简而言之,这篇手稿旨在说明如何从根本上体现思想可以为智力(作为学习和推理的能力)、意识(作为基于躯体的自我世界建模)和意志(作为预测模型的部署)奠定基础。制定有价值的目标)。
1. Introduction
1.1. Descartes’ Errors and Insights
“每当理论构建者提议将系统(例如有机体的大脑)中的任何事件、状态、结构等称为信号、消息或命令或以其他方式赋予其内容时,他都会借用情报 。他隐含地与他的信号、消息或命令一起提出了一些可以为信号阅读器、消息理解者或指挥官服务的东西,否则他的“信号”将毫无意义,将在未被接收和理解的情况下衰减。这笔贷款最终必须偿还,找到并分析掉这些读者或理解者;因为,如果做不到这一点,该理论将在其元素中包含未经分析的人类类似物,它们具有足够的智力来读取信号等,因此该理论将推迟回答主要问题:什么构成了智力?
——丹尼尔·丹尼特 [1]
从认知科学的传统角度来看,思维被理解为多个层次上的可分析物[2],其中功能(或计算)属性可以与其特定的算法实现分开考虑,而算法实现又可以进一步与特定的实现细节分开考虑。这种多层次的方法可以在研究心理功能方面取得进展,而无需了解潜在的神经生物学过程,从而使认知科学能够继续发展,而不会因我们对神经系统的有限了解而受到阻碍。或者,结合不同级别的分析可以对合理的假设提供约束,从而提供推理协同作用。
“4-E”认知提供了另一种观点[3-5],其中心灵被概念化为固有的体现、嵌入、扩展和活动。从这个角度来看,理解认知需要考虑智能系统如何依赖于身体控制过程。4-E 认知科学进一步强调嵌入特定环境如何既启用又限制功能,其中心灵的功能属性延伸到通过价值驱动的行动修改/构建的世界/利基。这种体现主义观点的更激进的版本倾向于拒绝传统认知科学的计算框架,避开显式模型和表示,转而支持动态环境耦合。相比之下,更传统的“认知主义者”倾向于将具身认知视为一项研究计划,其前景因拒绝连接大脑和心智的计算原理而受到限制。从这个角度来看,具身认知科学有时被视为有趣的集合而被驳回。身心相关性,但由于缺乏精确的可操作性,其概念可能很浅薄。
虽然这些观点往往看起来不可调和,但几乎普遍认为认知科学需要摆脱笛卡尔思维的最后残余[6-12]。唯一的分歧点似乎是笛卡尔思想的哪些方面是最严重错误的。收费如下:
1. 身心问题:将身体和心灵分开作为不同的存在秩序。
2. 戏剧谬误:用感觉的再现来描述感知给内在体验者。
3. 侏儒谬误:未能认识到内部体验者作为解释的不足,因为这需要进一步的体验者来解释他们的体验,导致无限回归。
许多人认为,认知科学的主要目标应该是用非心理计算和机械过程来解释这种幼稚的民间心理学[13,14]。激活主义者进一步(以不同的方式)认为,只有当我们从我们的解释框架中消除诸如表征之类的概念时,认知科学才会彻底清除其笛卡尔起源[3]。然而压倒性的共识是明确的:心智科学必须摆脱笛卡尔错误的遗留影响。必须将鬼魂从机器中驱除。
下面我提出这种共识可能在重要方面是错误的,并提出了这些假设的错误中的每一个都指向无价观点的方式。简而言之:
1. 心灵被彻底体现、嵌入、制定和扩展,但心灵的一些功能上重要的方面(例如,支持意识的整合过程)并没有延伸到身体,甚至也没有延伸到整个大脑。
2. 大脑不仅推断心理空间,而且用感觉和动作的表征填充这些空间,从而通过心理模拟为因果推理和规划提供基础。
3. 经验不仅被再现给内在的体验者,而且这些体验者以具有代理程度的具身人模型的形式出现,更重要的是,这些准侏儒为心灵的几乎所有方面形成了必要的脚手架。
接下来,我打算证明这些主张的合理性,并展示如何使用贝叶斯计算框架来解释注意力、想象力和目标导向的行为,以理解行动、感知和意识。我的最终目标是说明如何理解具身的本质,从而在计算观点和行动主义观点之间架起桥梁,从而为认知科学的统一奠定基础。
1.2. Radically Embodied Minds
“现在什么是空间和时间?它们是真实的实体吗?它们只是事物的决定因素还是事物的关系,但即使它们不是直觉的,它们仍然属于它们?或者它们是否只属于直觉的形式,因此属于我们心灵的主观构成,没有直觉,这些谓词就根本不能归因于任何事物?……没有直觉的概念是空的,没有概念的直觉是空的。都是瞎子。。。从最一般的意义上来说,综合是指将不同的表征放在一起,并在一种知识中掌握它们的多样性的行为。。。心灵永远无法在其表征的多样性中思考其同一性。。。如果它没有看到其行为的同一性,从而使一切服从。。。达到一种超然的统一。。。这种彻底综合的知觉统一就是经验的形式。它无非是根据概念表现出来的综合统一。”
——伊曼纽尔·康德 [15]
“我们永远不会超越表征,即现象。因此,我们将处于事物的外部;我们永远无法洞察它们的内在本质,探究它们本身是什么……到目前为止我同意康德的观点。但现在,作为这个真理的平衡点,我强调了另一个真理,即我们不仅是认知主体,而且我们自己也在我们需要知道的那些现实或实体之中,我们自己就是事物中的事物。本身。因此,一条从内部而来的道路向我们敞开,我们无法从外部洞察事物的真实内在本质。可以这么说,这是一个地下通道,一个秘密联盟,它仿佛通过背叛,将我们所有人同时置于堡垒中,无法通过外部攻击攻克。”
——阿瑟·叔本华 [16]
自然选择可能必然依赖于通用学习机制来设计能够自适应地导航(和构建)其环境的生物体[17]。关于领域通用过程的重要性,Mount castle [18] 在发现所有新皮质组织的规范分层柱状组织后提出了一种用于分层模式抽象的通用算法。经验证据越来越多地支持这一建议,分层“预测编码”(或更普遍的预测处理)提供了皮质功能的统一说明[19,20]。由于遗传规范的限制,这种对广泛适用机制的依赖可能是必然的。虽然复杂的结构可以由基因组“编码”,但特定的表型是以算法方式实现的,类似于简单的方程如何生成高度复杂的分形图案[21,22]。例如,肾脏很复杂,但没有一个肾单位是先验特殊的。同样,大脑具有复杂的微观结构和宏观结构,但除了少数例外[23,24],没有任何单个神经元连接是先验特殊的;相反,大多数神经复杂性是通过依赖经验的自组织产生的。此外,由于(混沌)自组织系统对初始条件的敏感性,复杂神经网络中特定连接的许多功能意义本质上可能难以预测[25,26]。预测功能意义可能更加受限于网络的“表征”属性是由只有通过独特的发展经验才会出现的信息所塑造的。
通过这些方式,虽然大脑的一些可预测特征可能受到广泛的遗传通道化的影响[27-29],但进化可能无法依赖于预先指定的复杂表征来产生认知适应。然而,从经验上看,婴儿似乎拥有令人印象深刻的关于物体和过程的丰富知识[30,31]——尽管发育研究通常在出生后几个月进行,甚至新生儿也有产前学习经历[32]。即使是来自“贝叶斯认知科学”的主要经验主义统计学习模型也承认需要先天的归纳偏差来促进推理和学习[33-35]。然而,如果遗传规范存在实质性限制,那么如何引入这些先验知识呢?
我建议解决推理空间约束不足的问题,方法是记住大脑是作为身体的控制系统进化和发展的,对身体的调节仍然是一生中思想的首要任务和中心背景[36,37]。身体代表了近乎理想的学习和推理初始系统,这个原型对象和因果系统为进一步建模提供了基础。有几个因素有助于体现学习的力量[38,39]:
1. 持续观察,甚至在产前也是如此。
2. 多模态感觉整合允许基于其他模态内的信息(即跨模态先验)减少一种模态的模糊性。
3. 体内相互作用(例如,吮吸拇指;手与手的相互作用;骨骼力传递)。
4. 行动驱动的感知(例如,作为先前期望的输出副本和推论放电;通过运动和交互进行假设检验)。
5.情感显着性(例如,身体状态影响价值信号,从而引导注意力和元可塑性因素)。
在成人学习运动序列的研究中可能会发现对跨模式协同作用的支持,其中通过结合多种模式来提高表现[40-42]。关于具身学习本质的其他见解源自对发育机器人和婴儿发育的研究[39,43],其中形态约束和兴趣舞蹈起到了加速学习的隐含归纳偏差的作用。例如,肩关节的有限运动范围可能会增加将物体(从手本身开始)放置在可以更容易地用其他传感器和效应器系统探索的位置的倾向[38]。
由此看来,复杂的心灵必然需要学习控制身体的初始经验,在进化和发展的过程中,通过扩展层次更高的皮层区域,复杂性的水平不断提高[44]。这种躯体发展遗产与抽象象征思想基于心理模拟[45,46]和来自具体经验的隐喻延伸的说法是一致的[47,48]。下面我将进一步描述这些心灵的具体化基础,表明与传感器和效应器的关联联系会生成多个抽象级别的身体地图,范围从第一人称半透明界面[49]到能够充当 自我反思的有意控制者(即目的论主体)。
1.3. The Cybernetic Bayesian Brain
“我们改变物体外观的每一个动作都应该被视为一个实验,旨在测试我们是否正确理解了我们面前的现象的不变关系,即它们在确定的空间关系中的存在。”
——赫尔曼·路德维希·斐迪南·冯·亥姆霍兹 [50]
[注:虽然以下部分可能在技术上具有挑战性,但关键要点是所有皮层都可以根据通过分层预测处理(HPP)(参见预测编码)的“自由能”最小化的通用算法进行操作,其中先前的期望 生成对可能的观察结果的自上而下的预测,并且预测和观察之间的差异作为预测误差上升到更高的层次。偏置预测误差可能向上传递的程度被称为精度加权,这被理解为构成 通过分层预测处理进行贝叶斯推理的注意力选择。]
正如知觉错觉所证明的那样[51,52],到达感官的信息本质上是模糊的,因为类似的输入可能来自无限数量的世界状态(例如,一个物体是小而近,还是大而远?)。贝叶斯大脑假说指出,感知可以被理解为一种概率推理,给定感官观察和过去经验的先验期望[53]。这些推论被假设为“贝叶斯”,构成了观察及其来自世界状态的隐藏(或潜在)原因之间的先验和似然映射的加权组合。沿着这些思路,自由能原理和主动推理(FEP-AI)框架提供了一个有前途的综合视角,用于在概率推理和预测误差最小化方面描述感知和行动[54-56]。FEP-AI 表明,分层组织的神经系统需要分层生成模型,其中感知(作为推理)是由对感官观察的可能原因的概率估计(或预测)构成的。
FEP-AI 框架基于基本的生物物理学考虑因素 [57,58] 以及控制论原理:根据具有不同形式反馈的自我调节/治理来分析复杂的自适应系统 [59-61]。持久系统必须调节内部和外部状态以避免熵积累,“良好调节定理”表明需要某种(预测)建模才能确保自适应选择[36]。预测误差(也称为“自由能”或“意外”)可以通过更新系统内部动态的隐式模型(即感知推理)或通过修改外部动态以进行感官输入来最小化 更接近地匹配预测(因此,主动推理)。这样,感知和行动都是最大化模型证据(通过最小化预测误差)来隐式预测系统保护状态的手段,这一过程被称为“不证自明”[62]。有趣的是(也许很奇怪)[63,64],这种分析的一般逻辑似乎与前理论的哲学直觉一致,在这些直觉中,持久系统被视为拥有一种“存在意愿”[65,66] ],即使这种明显的目标导向实际上是虚幻的(即,目的论,而不是实际的目的论)[13]。虽然对目的论现象的紧缩解释强调了目的论过程的连续性[14],但本手稿的目的不仅是要找出并解释目标导向性的起源,还要深入理解独特的类人意向性。
HPP 提供了如何在分析的算法和实现级别上实现贝叶斯世界建模的简洁说明 [19]。在 HPP 中(图 1),自上而下(经验)先验作为基于后验期望的预测向下传递(即,在进行观察后修改信念),这抑制了自下而上的预测错误向上传递皮质层次结构。在这种编码方案中,所有观察结果都采取预测误差的形式,表明最低层级的感官输入、较高层级的感官期望以及更高层级的更民间心理多样性的信念。[在这些模型中,后验期望(或更普遍的信念)在形式上等同于模型中中间级别的经验先验;我将互换使用(经验)先验和后验。]预测错误上升到皮质层次,预测编码在更新信念和后续预测的过程中自动优先考虑新的“有新闻价值”的信息。这种循环的消息传递被认为在皮层的每个部分同时发生,层次动态反映了层次世界结构[67,68],包括在多个(层次嵌套)时间尺度上展开的事件[69-71]。通过这种方式,HPP 在大脑和世界之间生成了一个动态映射,由受行动影响的感知的(分层组织的)循环调节。HPP 通过主动推理提供改变世界状态以更好地适应预测的方法,进一步为 FEP-AI 的制定提供了一个机械过程模型 [72]。这意味着所有神经元动力学和随后的行为都可以被视为遵守相同的命令:即最小化预测误差(即自由能或“意外”)。
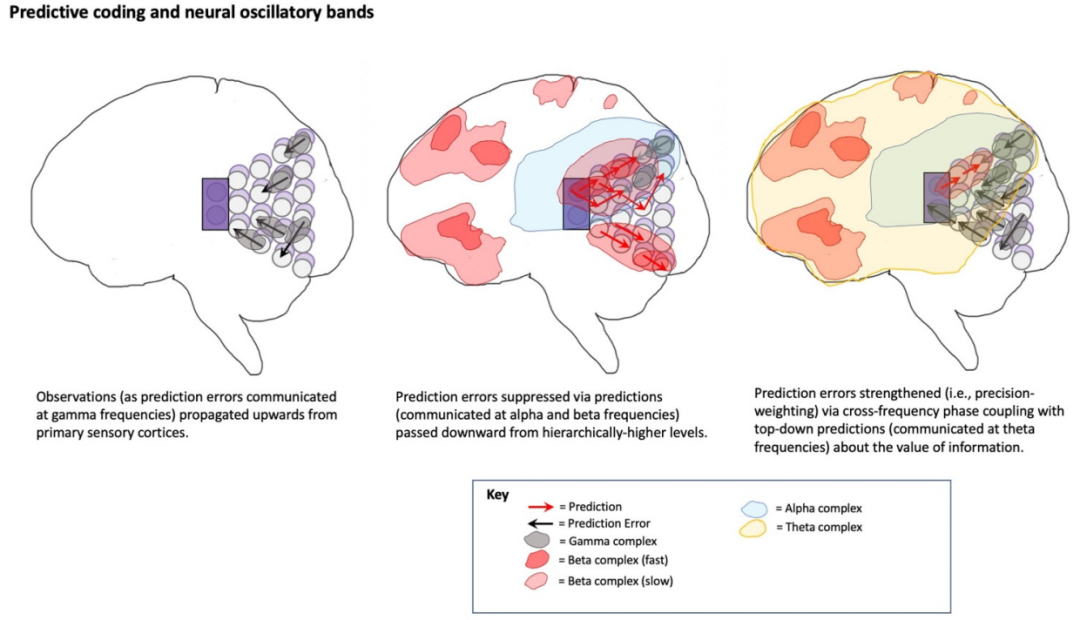
图 1. 大脑中分层预测处理的示意图。左图:对主要感觉模式(黑色箭头)的观察表明,信息通过浅层锥体神经元向上传递,通过小型同步复合体(即神经元群)以伽马频率进行通信。中图:来自大脑分层更深区域(红色箭头)的预测抑制了上升的观察,通过不同大小的同步复合体以 α 和 β 频率进行通信;自下而上的观察结果(作为预测误差)仅在无法通过自上而下的预测进行预测时才会向上传递。右图:通过对信息价值的期望来加强预测误差来进行注意力选择,通过与 θ 频率的大型同步复合体进行跨频相位耦合进行通信。对于所有面板,深色箭头表示与必然(隐式)概率信念相关的精确加权程度,从而确定对贝叶斯推理/更新的相对贡献。有关这些假设的生物计算原理的更多详细信息,请参阅以前的工作[73,74]。
根据 HPP 的说法,大脑既充当控制论控制器又充当记忆系统 [59-61],依赖于经验的期望为控制提供了基础,从而创造了新的记忆和预测。这种控制论视角已进一步扩展到通过预测调节(即动态平衡)维持稳态的内感受推理[61,75]。在这种对情感体验的解释中,情感状态是由不同程度的不确定性下的内感受和自主状态的主动推理控制产生的[75,76]。
可靠的推理必须考虑与各种信念相关的确定性程度,在 HPP 中被描述为概率分布的“精度”(即逆方差)[77]。在HPP中,上升信号更新下降的后验期望,与(经验)先前预测和基于感官的观察的相对精度成正比。更精确的预测误差对更新更高层次的信念有更大的影响,这可以被认为是选择更可靠的来源 “新闻”——而不是更不可靠或“假”的新闻。从算法上来说,基于确定性的预测误差偏差将贝叶斯推理实现为概率的精确加权总和,从而为注意力选择提供了功能基础。从机制上(以及潜在的现象学上)来说,这种注意力选择涉及对特定神经元群体的兴奋的调节,因此使得必然的精确加权预测误差或多或少有可能渗透到皮质层次结构的更深层部分,在这些部分,这些信息可能会形成更大的规模。潜在意识)动力学[73,74]。
精确加权可以对下降预测和上升预测误差的相对影响产生深远的影响。如果自下而上的信号过于精确,那么过多的感觉预测错误可能会进入皮质层次结构的更深部分,这可能会导致自闭症患者经常观察到的过于强烈的感觉反应[78-80]。或者,如果自下而上的信号给出的精度太低,那么预测误差可能不会导致信念更新,如果过度,可能会导致假阳性推论,可能包括精神分裂症中观察到的妄想和幻觉[81-83] ]。
在作为推理的感知的基本思想及其对主动推理的控制论扩展之间,贝叶斯大脑得到了彻底的体现。这一讨论进一步表明,面向行动的身体地图构成了贝叶斯大脑的核心,其构建推理流程的方式不仅增强了控制力,而且还允许大脑解决迄今为止被认为需要广泛的先天知识的推理问题。如上所述,身体为大脑提供了学习机会,其中假设空间受到有效限制,因此变得易于处理。鉴于具身学习的适应性意义,选择压力很可能以大脑容易推断和学习的方式塑造身体,从而塑造进一步的选择历史。我进一步建议,这种更容易获得的知识使学习者能够沿着最近发展区域处理日益具有挑战性的问题(或课程[84])[85]。
从神经发育的角度来看,该模型可以被广泛地视为皮亚杰模型[86],尽管没有针对特定发育阶段的智力承诺。这一观点与在开发相当准确和有用的预测模型过程中成功的结构学习需要以身体为中心的自我模型的观点是一致的[75,87,88]。该提议也与之前对主动推理的描述一致[89],但提出了一种特定的——我认为是必要的——生成模型来反映世界结构的方法。也就是说,我们可以通过了解身体作为更容易处理的因果(和可控)系统来获得许多基础(经验)先验。如果没有这种推理引导的立足点/抓地力,贝叶斯认知科学和贝叶斯大脑都可能无法解释生物学习者如何处理约束不足的推理空间。
体现作为基本信念来源的概念在 FEP-AI 中得到越来越多的认可。Allen 和 Tsakiris [90] 令人信服地提出了“身体作为第一先验”模型,其中内感受推理提供了高度精确的先验(或预测)来源,因此允许整体主动推理信念动态由有机的、动态的需求主导 。在他们的解释中,内感受在另一种意义上提供了基本先验,在建立身体所有权和(最低)自我模型方面发挥着核心作用,这两者构成了了解世界其他方面的必要先决条件。这些具体先验的具体性质已通过发育早期社会情感耦合的塑造得到了进一步探讨,包括围产期和产前与婴儿赖以生存的照顾者的互动[87,91,92]。下面,我将探讨其中的一些想法,以及其他(补充)方式,在这些方式中,具体化可以为成长中的思想形成必要的基础,其程度可能很难被夸大。
2. From Action to Attention and Back Again
虽然接下来几节中的一些内容可能具有挑战性,但这些部分的关键信息如下:
1. 许多有意识的目标导向行为在很大程度上可以通过感知状态和想象状态之间的迭代比较来实现,预测处理机制根据这些对比操作的预测误差自动生成合理优先的子目标。
2. 部分表达的运动预测——最初是公开表达的,后来是内化的——可能为所有有意识的注意力、工作记忆和想象力提供基础。
3. 这些想象可能为有意识地控制明显的行动模式提供基础,包括追求复杂的目标。
2.1. Actions from Imaginings
这份手稿的目的是阐明从根本上体现的基础
机构,范围从基本的运动控制到复杂的规划。为此,我提出了一个模型,其中所有有意识的目标导向行为都是通过分层预测编码以及感知和想象(即反事实)状态之间的迭代比较来实现的[93]。让我们考虑一下某人在计算机上写一篇手稿并发现他们想要茶,同时还推断他们的杯子是空的。这些经历可能包括心理想象或喝茶的记忆,并伴有口渴的感觉。然而,如果目前没有喝茶,这种反事实的信念(或预测)就会与感官证据相矛盾。反事实的喝茶和观察空杯子之间的对比可能会引发过去类似的情况(例如,未解决的口渴或饥饿)。这些情况也可能伴随着相关的可供性[94-96](例如,泡茶/获取行为),与最小化首选状态和当前估计状态之间的各种差异相关。也就是说,记忆和类似的想象很可能由行动所主导,而这些行动的相关性是根据过去的类似情况确定的[59,97]。
这些反事实的想象很可能集中在特定目标的差异上,例如人们可能坐在电脑前,而不是获得想要的茶(表 1;图 2)。在这种情况下,最有可能从记忆中检索到的一系列可供性将涉及诸如走到厨房(水槽、炉子和茶壶所在的地方)等动作。然而,我们口渴的智能体可能会发现自己面临着另一组差异,例如坐着不是步行去厨房。在这种情况下,下一组可能被检索的记忆功能可能是那些涉及起身的记忆功能,也许还有转移体重和将脚踩在地上的功能。在不同的点上,这些反事实计划可能会变得足够接近当前状态,从而变得可操作,从而有助于持续的行动选择。
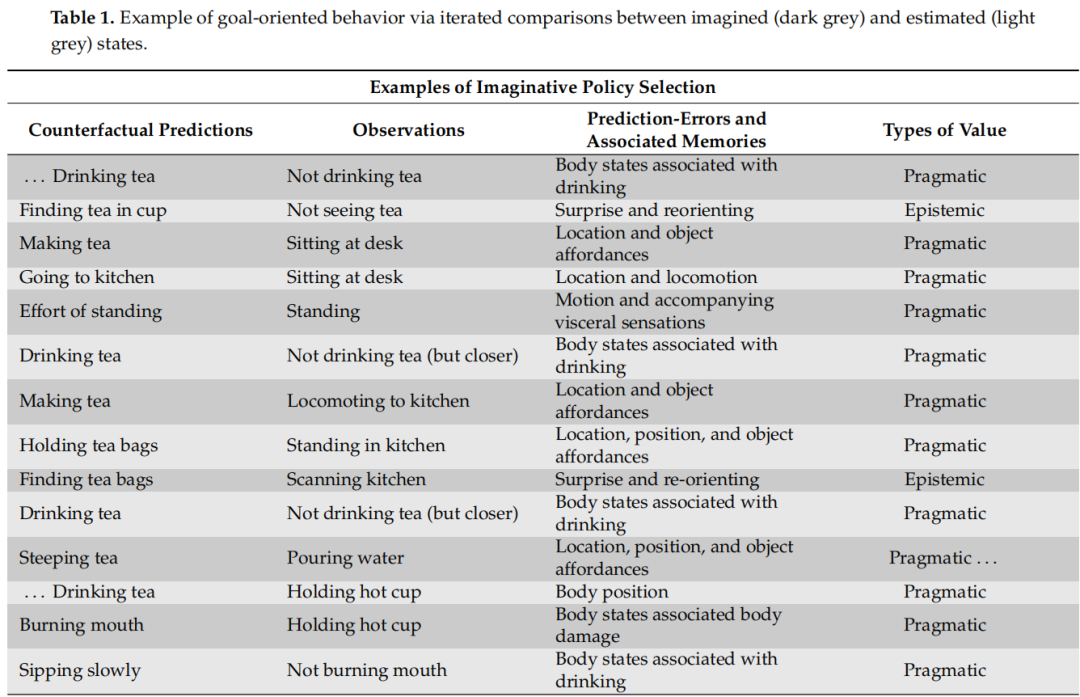
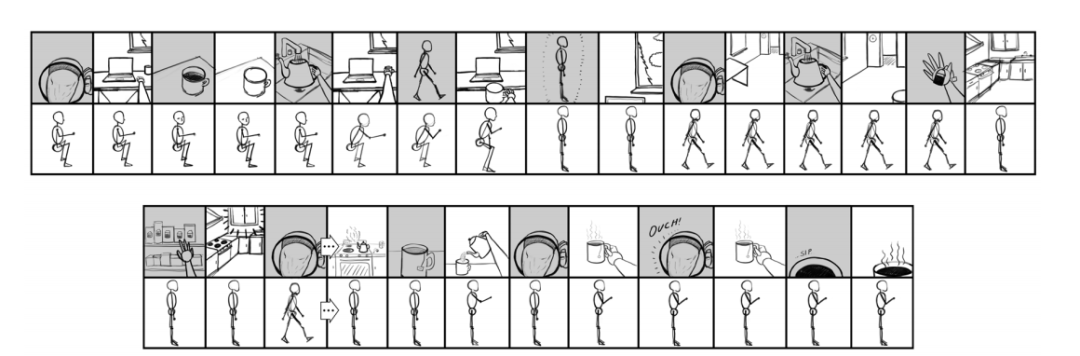
图 2. 通过目标状态的后向链接与政策选择相关的想象和看法。每行的顶部面板说明表 1 中列出的反事实预测(灰色)和观察结果(白色)。每行的底部面板描述相关的身体位置。注意:这个例子缺乏大量的元认知和反射处理,只有几个面板描述了代理从外部角度想象自己。在某种程度上,意识实际上模拟了与泡茶相关的行为(而不是走神),对于这种相对简单的行为,可能会出现一种更直接和非反思的认知模式。然而,对于更复杂的目标,我们可能期望更精细的想象,涉及具有不同细节和抽象程度的客观化自我表征。
从机制上讲,当与目标表征相关的神经元集合与与近期感觉运动偶然事件相关的神经元集合具有相对较高程度的重叠时,反事实想象的这种可操作性就可以实现。如果在当前估计状态和期望状态之间的收敛兴奋条件下超过了运动动作选择的关键阈值,那么来自想象目标的神经活动可能变得能够在功能上耦合或定向诱导(即“奴役”)[ 98]——生物体的效应系统。这些想象的场景也将根据不断变化的感官证据和行为的展开而不断改变。例如,在前往厨房的途中,可能会看到茶壶的位置,以及与填充和清空水壶相关的记忆,因此调整关于是否需要将水壶带到水槽处取水的期望。
在 FEP-AI [55] 中,我们推断自己制定的行动序列(即政策)由我们的先验偏好和行动的预期后果主导。对于适应性行为至关重要,最小化预测误差(即自由能)的必要性也可以应用于预期预测误差(即预期自由能),其中我们选择预期带来首选结果(例如, 喝杯茶)在未来。这种预期的自由能(即累积的、精确加权的预测误差)可以根据与实用价值或认知价值的相关性进一步分解,其中实用可供性是根据先验偏好(即喝茶)来定义的,而认知可供性则需要机会 减少不确定性(例如,找到茶袋)[99]。
就动作经过高度排练而言,实现目标可能需要最少的有意识的想象[43,100]。如果茶是我们智能体生活世界的中心[101,102],那么整个序列最终可能只伴随着非常短暂的主观意识闪现[103]。还值得注意的是,特定肌肉的协调活动可能很少有意识,而在发育早期就可以毫不费力地掌握这些肌肉。如果目标的实现涉及新的环境——例如,第一次学习如何准备散叶茶——意识可能在塑造行为方面发挥更多的核心作用。
在这种富有想象力的规划模型中,只要预期目标状态与推断的当前状态之间存在差异,与目标相关的表示的激活就会产生预测错误。也就是说,与目标相关的表示充当预测,并且与估计的当前状态的差异导致在多个层级生成的与目标实现相关的特定子表示内的预测错误。当目标差异预测错误向上传递到皮质层次结构时,它们可能会访问连接更丰富的网络,从而实现(潜在有意识的)信息的全局可用性[104],因此在驱动后续神经元活动方面变得更加有效。如果有足够的经验, 下一刻具有更大活动的与目标相关的表征可能对应于最可靠地成功(并因此得到强化)最小化过去那些特定类型的差异(即相关可供性)的神经元集合。
由此看来,目标状态表示和当前状态之间的比较会产生更大的目标相关表示活动,并具有更多的预测误差,通常对应于实现目标的最大障碍。这些来自迭代对比的最大预测误差来源可能自然地建议优先考虑为整体目标实现选择适当的子目标[105]。子目标表示和估计当前状态之间的顺序比较可能会激活其他障碍的相关子表示,克服这些障碍将成为下一个目标状态。这个比较过程迭代地进行,对想象的目标和估计的当前状态进行重复离散更新[106],从而根据预测的价值实现塑造神经动力学(以及必然的经验流)。
凭借经验和学习(包括通过想象的经验[107]),这种迭代选择过程可能会变得越来越有效。考虑到上级和下级动作序列本身是关联链接的,它们将提供相互约束,因为并行比较不断地最小化多个动作层次结构级别上的总体预测误差。因此,类似的认知过程可能涉及选择实现(可能是抽象的)目标的高级策略,以及有意识地调整从记忆中检索的低级序列以进行有意的运动控制。就主动推理而言,熟练的运动参与很大程度上是通过预测动作提供“平衡点”来源的能力来实现的[108],这是通过预测处理机制动态自组织的神经系统实现的[109]。这里提出的模型描述了作为行为驱动因素的这种高级预测的特定(潜在意识)来源。[值得注意的是,腹侧被盖区和黑质致密部存在单独的多巴胺值信号[110],以及不同的时间动态和信用分配挑战,表明需要额外的神经计算细节才能充分描述(分层)的复杂性 神经元活动选择。] 上面以想象力为中心的描述描述了有意控制过程在其能够影响行为的(有限)程度上的运作。通常,这种有意的影响可能“仅仅”在无意识的习惯性和反射性模式之间发挥偏置竞争和合作的作用。
由此看来,有一个目标就是预测其实现,最初的预测会产生进一步的因果路径,作为弥合想象与现实之间差距的手段。想象与行动之间的这种联系在意念运动理论中有先例[111-113], 这也已经在关于注意偏差(即精确加权)的主动推理术语中进行了探索[114]。下面我扩展了这项工作,提出所有自愿(以及非自愿)注意力都可以通过部分表达的运动预测作为心理行为来实现,从而为控制推理动力学作为一种隐性运动技能的精确权重提供了一个代理来源。[请注意,我并不是说大多数注意力都是有意识地引导的。相反,许多(也许是大多数)自上而下的精确权重可能是由内感受显着图自动生成的,由岛叶和扣带皮层层次结构实现[115]。
2.2. Attention from Actions
“开始考虑大脑皮层整体行为的一个好方法是想象大脑的前部正在‘观察’感觉系统,其中大部分位于大脑的后部。这种分工并不会导致无限倒退。。。如今,侏儒假说已经非常过时了,但这毕竟是每个人对自己的看法。如果这种压倒性的错觉没有以某种方式反映大脑的一般组织,那将是令人惊讶的。”
——弗朗西斯·克里克和克里斯托夫·科赫 [6]
在这种对注意力控制的彻底体现的解释中,部分表达的运动预测实现了感知的所有有意指导,包括注意力、工作记忆、想象力和行动。这种控制是通过从动作相关的神经元集合到相关的感知相关的神经群体的传出副本来实现的,并通过过去的学习建立功能联系[116,117]。从发展和进化的角度来看[118],行动最初采取外部表达行为的形式;就外显注意力而言,效应器系统根据环境调整传感器的方向,从而改变感觉模式。然而,通过不完整或抑制的表达,这些行为也会在想象中隐蔽地表达为具有不同程度的细节和意识的心理模拟。当这些针对显性关注的部分表达的运动预测被激活时,与相关感知组件的连接可以用作隐性关注的基础。随着经验的积累,人们将学会对显性和隐性表达的适应性控制,从而允许在感知、想象和行动之间进行上下文敏感的转换。通过有意识地将注意力集中在工作记忆的内容上,包括对因果推理和规划所需的反事实场景的想象,可以对感知和行动进行进一步程度的控制(图3)[119]。
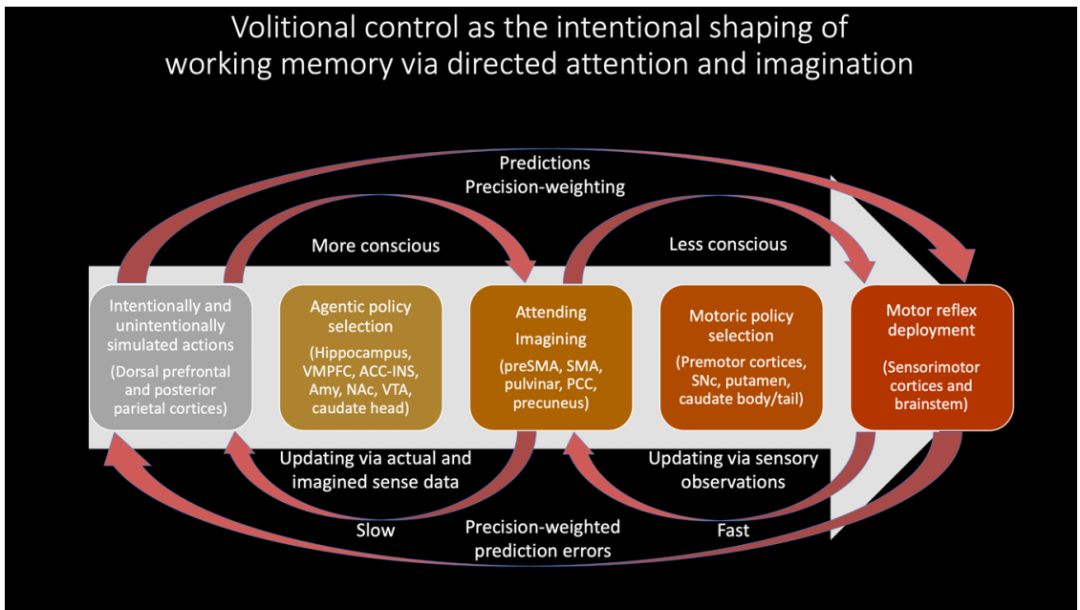
图 3. 通过多级主动推理控制层次结构和相关神经系统进行富有想象力的策略选择。从左到右,预测作为(经验)先验期望向下传递,并通过感官观察更新为后验期望(和后续先验),然后作为预测误差向上传递。上层控制过程(左动作-感知循环)涉及更缓慢演化的吸引状态,对应于更粗粒度、更高层次的有机尺度原因的抽象建模,这可能与意识意向性相关。较低级别的控制过程(正确的动作感知周期)涉及更快速演化的吸引状态,允许快速调整动作感知周期和细粒度的环境耦合。虽然多个因素可能表明两层层次结构的重要性,但这种区别不应被夸大,因为集成(潜在意识)过程可能会关注(或耦合)任一级别的动态。VMPFC = 腹内侧前额叶皮质,ACC-INS = 前扣带皮层和岛叶,Amy = 杏仁核,NAc = 伏隔核,VTA = 腹侧被盖区,SMA = 辅助运动区,PCC = 后扣带皮层,SNc = 黑质致密部。
该模型代表了维果茨基[120]关于通过言语内化发展思维的假设的概括。由此看来,我们首先学习如何说话,然后学习如何准备在不公开表达的情况下说话,然后通过学习如何在内心对自己说话——想象一下如果言语是外部表达的,我们会听到什么——我们获得了以下能力:象征性的思想。同样,通过最初公开行为的内化[121],所有自愿(以及非自愿)认知都可能发展为基于可控效应器系统的控制层次结构。事实上,我认为骨骼肌是所有自愿控制的唯一基础,因为它具有通过实时低延迟反馈生成粗略动作的独特能力。
总而言之,从个体发生(和系统发生)角度来看,信息获取最初是通过明显的行动感知而产生偏差的。然而,学习者最终获得秘密执行动作的能力,从而利用特定模拟动作的相关感知成分作为秘密处理(包括反事实想象)的基础。在所有情况下,动作都起源于感觉运动皮层和相关纹状
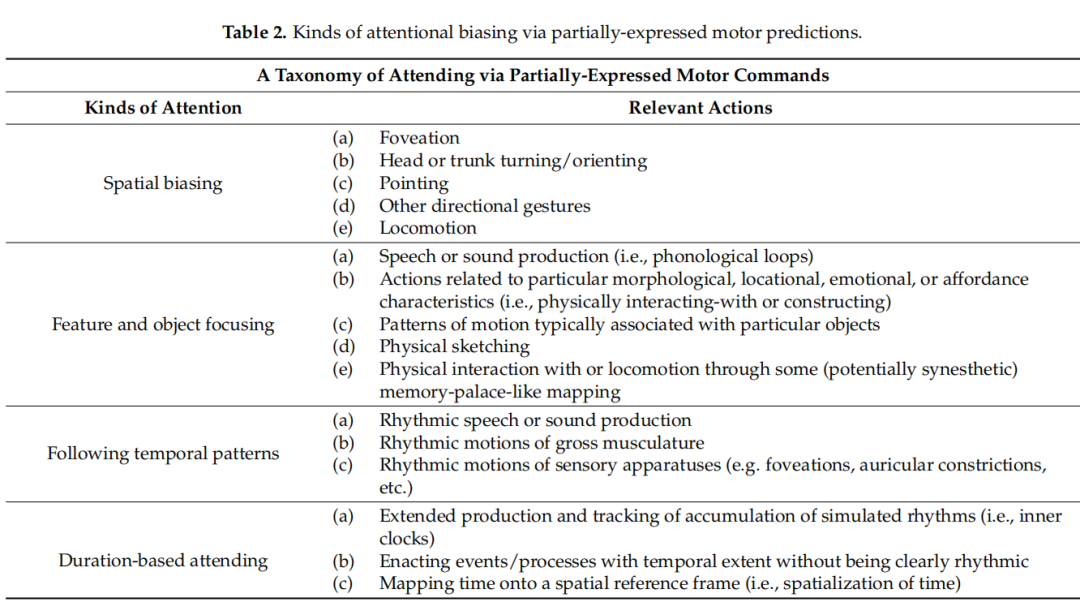
体环的控制层次,其动力学基础是操纵骨骼肌以及相关的感觉。通过这种方式,部分表达的运动预测可以在空间上(例如,模拟眼跳)、时间上(例如,模拟节奏动作)、甚至基于语义或对象特征信息(例如,模拟语音)来偏置注意力和工作记忆(表2) )。
2.3. Imaginings from Attention
这个解释与前运动[122]和有偏见的竞争[123]注意力理论一致。然而,我进一步认为,部分表达的运动预测是在工作记忆中自愿生成内容的唯一手段(图 3),无论是基于关注最近感觉的感知痕迹,还是生成与实际感官脱钩的反事实感知体验 虽然这个提议在强调具体化的程度上似乎过于激进,但可以在暗示工作记忆中“内部运动痕迹的形成”的大量证据中找到一致的支持[124]。当额叶眼区的神经元振荡夹带感觉皮层时,注意力选择会得到增强,进一步的证据可能会得到增强[125],以及视觉注意力和工作记忆很大程度上取决于额顶网络[126,127](此处解释为 作为动作感知层次结构的上层)。就自上而下注意力的具体来源而言,纹状体和中脑价值信号(例如多巴胺)可能发挥关键作用[128],既影响每时每刻的模式选择,也使未来的规划受到历史的影响。强化和惩罚。就学习有效地将这些模式与行动目标、心理内容以及由此产生的对行动选择的影响结合起来而言,可以理解为涉及意向性。
想象的目标可以在大约200-300毫秒的时间尺度上生成并与估计状态(无论是想象的还是观察到的)进行对比[129-132],可能通过与海马θ的跨频相位耦合激活/稳定新皮质整体来实现 节律(图 4)[133,134]。新的(后)目标相关想象的迭代生成可能需要更长的时间,这可能取决于对比过程的复杂方式。如果这个过程需要海马复合体稳定皮质整体的新组合,那么这可能有助于解释为什么内侧颞叶损伤与反事实处理受损相关[135,136],这里形成了通过迭代进行有意动作选择的基础 对比和预测处理。这些模型的预测是,海马体损伤可能与痴呆症患者的目标追求中断有关——这超出了任务遗忘的问题——对此,有更多的轶事证据可以证明这一点。
想象的目标可以在大约200-300毫秒的时间尺度上生成并与估计状态(无论是想象的还是观察到的)进行对比[129-132],可能通过与海马θ的跨频相位耦合激活/稳定新皮质整体来实现 节律(图 4)[133,134]。新的(后)目标相关想象的迭代生成可能需要更长的时间,这可能取决于对比过程的复杂方式。如果这个过程需要海马复合体稳定皮质整体的新组合,那么这可能有助于解释为什么内侧颞叶损伤与反事实处理受损相关[135,136],这里形成了通过迭代进行有意动作选择的基础 对比和预测处理。这些模型的预测是,海马损伤可能与痴呆症患者的目标追求中断有关——超越任务遗忘的问题——对此可以从神经病患者“HM”的案例中找到额外的轶事证据[137] ]。海马体在协调目标导向行为方面的核心作用通过其参与“替代试错”行为[138]以及 θ 节律的中心地位进一步表明用于有意控制[126,131,139,140]。其他支持证据可以在其他领域的海马介导的反事实推理编排中找到,从运动啮齿类动物可能轨迹的预测信息[141,142]到通过想象人类来模拟替代观点[143,144]。
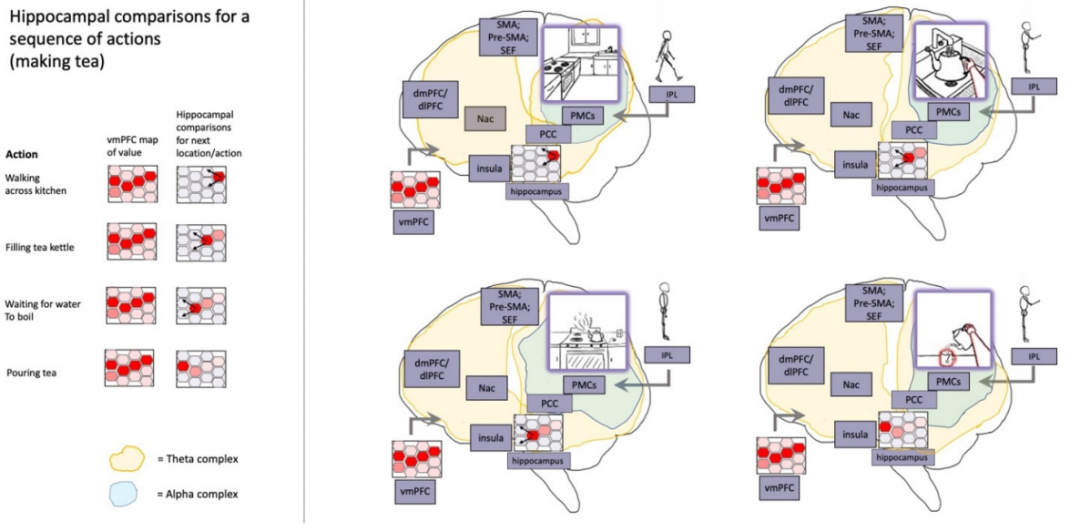
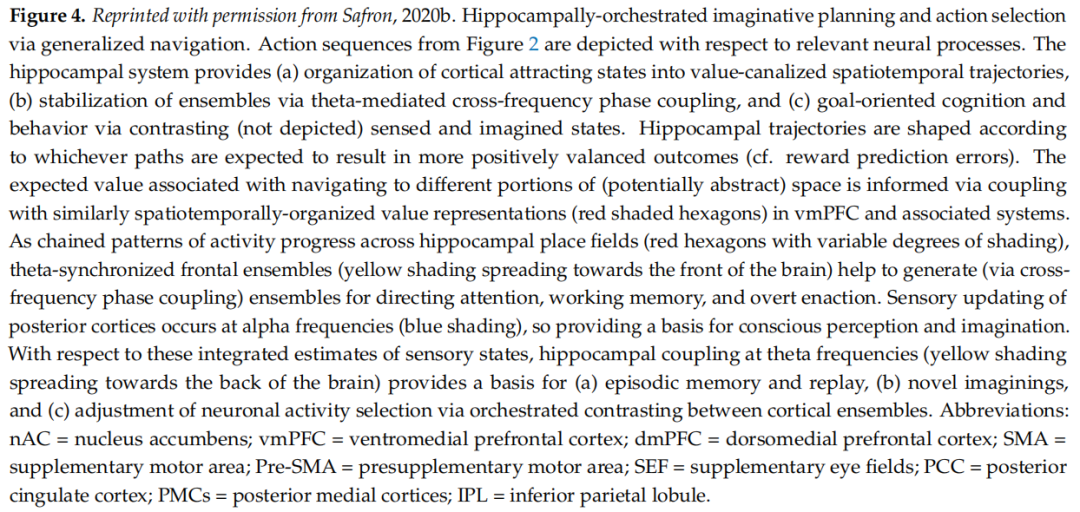
图 4。经 Safron 许可转载,2020b。通过广义导航进行海马精心策划的富有想象力的规划和行动选择。图 2 中的动作序列是针对相关神经过程进行描述的。海马系统提供(a)将皮质吸引状态组织成价值通道化的时空轨迹,(b)通过θ介导的跨频相位耦合稳定整体,以及(c)通过对比(未描述)实现目标导向的认知和行为)感知和想象的状态。海马轨迹是根据预期会导致更积极的结果的路径来塑造的(参见奖励预测错误)。与导航到(可能抽象)空间的不同部分相关的预期值是通过与 vmPFC 和相关系统中类似的时空组织值表示(红色阴影六边形)耦合来告知的。随着海马位置场(具有不同程度阴影的红色六边形)的连锁活动模式进展,θ同步的额叶整体(黄色阴影向大脑前部传播)有助于生成(通过跨频相位耦合)用于引导的整体注意力、工作记忆和外显表现。后皮质的感觉更新发生在阿尔法频率(蓝色阴影),因此为有意识的感知和想象力提供了基础。对于这些感觉状态的综合估计,θ频率下的海马耦合(黄色阴影向大脑后部传播)为(a)情景记忆和重放,(b)新颖的想象,以及(c)调整通过皮层整体之间精心设计的对比来选择神经元活动。缩写:nAC = 伏隔核;vmPFC = 腹内侧前额皮质;dmPFC = 背内侧前额皮质;SMA = 辅助运动区;Pre-SMA = 前补充运动区;SEF = 补充视野;PCC = 后扣带皮层;PMCs = 后内侧皮质;IPL = 顶下小叶。
这些建议扩展了之前通过预测处理进行运动控制的描述[114],强调有意识体验的身体图作为有意定向注意力(即精确加权)、想象力和行动来源的作用。然而,如果自愿行动是注意力的函数,并且如果注意力是通过模拟行动和部分表达的运动预测来实现的,那么首先是什么让自愿行动得以发展呢?这种潜在的解释性倒退是通过(可能令人惊讶的)轻松控制巧妙“设计”的身体计划来防止的,特别是当这种形态被限制在状态空间的自适应区域时[38,110]。为了例如,大部分运动来自相对可控的摆动力学,脑干和脊柱模式发生器进一步帮助产生连贯的定时力向量和运动模式[145]。再举一个例子,运动范围有限肩部手臂和手指关节促进有效参与和探索通过抓握来认识世界(例如,通过手指不向后弯曲来更容易抓握)以及在可能的视野内进行操纵(例如,手臂更有可能放置物体在面部传感器前面)。这种近乎最佳的抓地力可以通过以下方式进一步促进:指垫和可变形软机器人操纵器之间的功能相似性,其中力的程度提供了自适应可调的接触表面,因此简化通过卸载到形态“计算”进行控制[146]。通过这个帐户,不仅精心设计的身体计划会自动有助于适应行为[147],但这样的具身智能为所有认知(和情感)提供基础和支架发展。这些有利的学习条件通过监督得到进一步加强在人类的背景下其他更有经验的人(包括养育父母)
工程环境[92,148,149]。通过这些方式,我们自动发现自己在有能力的机构中从事充满价值的目标导向活动[100],其中这些对世界的把握最终使我们能够构建连贯的世界模型并有意识地意向性。
3. Grounding Intentionality in Virtual Intrabody Interactions and Self-Annihilating
Free Energy Gradients
“我们必须拒绝古老的假设,这些假设将身体放在世界中,将看见者放在身体中,或者相反,将世界和身体放在看见者中,就像放在盒子里一样。既然世界是肉体的,那么我们应该把身体和世界之间的界限放在哪里呢?既然身体里显然只有“充满器官的影子”,也就是说,更多的是可见的东西,那么我们应该把看见者放在身体的什么地方呢?所看到的世界并不在我的身体“之内”,而我的身体最终也不在可见的世界“之内”:就像肉身与肉身一样,世界既不包围它,也不被它包围。作为对可见事物的参与和亲缘关系,视觉既不包围它,也不明确地被它包围。可见事物的表层仅适用于我的视觉和我的身体。但这个表面之下的深度包含了我的身体,因此也包含了我的视野。我的身体作为一个可见的事物包含在整个景观中。但我的视觉身体包含着这个可见的身体,以及与之相关的所有可见的东西。其中一个与另一个相互插入和交织……”。
——莫里斯·梅洛-庞蒂 [150]
该提议从根本上体现为声称通过内化的行动模式提供了对有意控制的详尽描述。部分表达的运动预测被认为是对注意力、工作记忆和想象力进行意志控制的唯一手段,无论这种影响是基于关注最近感觉的感知痕迹,还是通过相关的虚构动作产生新颖的反事实感知体验 这些部分表达的运动预测所选择的表征在主动推理中起着特别强大的预测作用——尤其是如果有意识的话[73]——因此提供了自愿塑造思想和行为的强大手段。
在这种主动推理的观点中,意图代表了信念和欲望的功能交集,其中欲望被理解为一种反事实信念,因此会产生预测误差(或自由能梯度),并通过行动将其最小化。正如下面将更详细讨论的,情绪和感觉可以被有效地概念化为有机体模式上的行动-感知循环的主动和感知成分。按照这种观点,欲望可以被概念化为驱动主动推理的情绪和驱动主动推理的感觉。更新感知模型[151]。如上所述,对反事实的期望世界状态的想象将产生与目标相关的预测误差,这些误差可以通过更新预测(欲望作为感觉)或通过更新世界状态(欲望作为情感)来最小化。
鉴于与欲望相关的价值来源植根于稳态命令,这些充满情感的预测错误将集中在内感受方式上[152,153](图5)。正如 Seth 等人令人信服地描述的那样。[154]就岛推理层次而言,这种主要的内感受自由能可以通过调节神经内分泌和自主功能来异位最小化。或者,这些主要的内感受自由能梯度(这里理解为欲望)可以通过更间接的策略来最小化,即生成关于行动的外感受和本体感受后果的反事实预测[75]。如果反事实的本体感受姿势被稳定地牢记在心,它们最终可能会导致运动池的驱动,因为神经系统会自我组织,通过公开的行动来最小化预测误差[72,109,155]。从这个角度来看,所有行为最终都被理解为构成预测性稳态生命管理的一种扩展的动态平衡[156]。

图 5. 富有想象力的规划和政策选择背景下的互动模式。该帧序列描述了代理选择动作以实现喝茶的目标时模态之间的交互(见图 2 和 4)。每一行描绘了体验的不同方面,所有这些都在以目标为导向的认知和行为的背景下相互作用。想象和感知(第一行和第二行)对应于视觉空间意识的当前内容,可能由以后内侧皮质为中心的层次结构介导。该工作空间是否被感知或想象占据,将分别取决于与层次较低的皮质区域更强的相互作用,或者更多的刺激解耦默认模式处理(因此提供反事实感知)。身体图(第三行)对应于经验丰富的本体感觉姿势,可能由以下外侧顶叶皮质为中心的层次结构介导。身体部位的不
同阴影和大小表明与持续目标追求相关的可供性相关显着性相关的不同注意力焦点和建模属性。欲望(第四行)对应于情感身体体验,可能也由下外侧顶叶网络介导,但也涉及与岛叶和扣带皮层的相互作用。不同的红色和蓝色阴影分别表示与不同身体部位相关的正价和负价,包括关于内部环境的半局部方面的内感受估计。总而言之,第 1 行和第 2 行可以被视为构成“心灵之眼”(或“笛卡尔剧场”),而第 3 行和第 4 行则被视为“活体”。通过它们的耦合,这些网络和相关现象可能(可能详尽地)构成意识的物理基础,作为基于代理的建模和控制的集成工作空间。
欲望通过本体感受预测驱动显性动作选择的程度在很大程度上取决于分配给皮质层次结构各个部分的差分精度权重(图 1 和图 3)。对于岛叶,精确加权可以使预测误差达到更高的层次(即解剖学上更靠前的)水平[154],其中内感受信息可能有更多机会影响外感受和本体感受层次的预测,从而驱动行动。是否通过更新内部模型(即感知推理)或更新世界状态(即主动推理)来最小化总体预测误差(即自由能)将取决于主要模态精度的衰减[72,157],因此保护与目标相关的预测 避免因与当前感官数据的差异而中断(或更新)。例如,较低水平的内感受层次的精确度降低可以通过自主功能(即,作为无意识情绪的欲望)促进内感受主动推理,因为内感受感觉增益的减少将允许相关表征通过预测编码机制更加可更新。相反,提高内感受层次中层的精确度将促进内感受信息到达前岛叶并获得更多的全局可用性(即,作为有意识的感觉的欲望)。如果这些有意识地感觉到的内感受状态对其他模态产生稳健的预测,并且如果感觉证据没有过高的精确度,那么自由能将向上内感受流动并进入外感受和本体感受层次结构,从而驱动行动以最小化整体预测误差(即,自由能量) 活力)。通过这些方式,欲望(作为自由能梯度)可以被视为一种流过多模式身体图的力[158],如果这些级联预测足够稳健,可以通过脊髓运动池最小化预测误差,则可能会导致明显的行动 从计算上来说,这些信息流将由精确加权的模式构成,要么选择特定的预测来执行(例如,用于最小化特定类型的内感受预测误差的相关供能舞蹈),要么作为影响政策选择阈值的超先验 (例如,调节神经调节系统)。
这种通过内脏欲望驱动大规模神经元活动选择的解释与内感受推论一致,由于这些预测的高度稳定(且如此精确)的性质,内感受推论具有独特的奴役皮层的能力[90],这可能通过 这些子网络的中心性很高。这些模型得到了大量研究的支持,其中岛叶-扣带回连接被证明是动机认知和行为的核心[159-162]。进一步的间接支持证据可以在呼气期间更频繁地发起的自愿行动中找到,其中相关的神经动力学(即准备电位)表现出呼吸周期的调节[163]。也许这些本能驱动行动模型最令人信服的证据可以在 Zhou 等人的工作中找到。[164],其中有机显着性模型构成了静息状态网络中最高级别的分层控制。
许多受内感受影响的注意力和行动选择偏差可能是无意识的。然而,当这些基于本能的[130]预测错误达到我们意识到的皮质层次结构水平时,我们可以使用来自外感受和本体感受模式的输出副本(作为预测或贝叶斯先验)进一步关注这些感觉。例如,我们可以(公开地或想象地)视觉扫描身体及其内部的地图,因此通过直接从内部环境传输此信息的感觉通道以外的方式来建模内感受内容。这种有意关注内感受状态可以让我们调节意识和行动受欲望影响的程度。理论上,这种机制还可以提供正念练习的积极模型,例如“身体扫描”或呼吸冥想。165–167]。
这种对内感受状态的直接关注的情绪调节的解释也可以适用于对外感受和本体感受模式的关注。部分表达的运动预测可能会影响这些身体表征中的活动(例如,模拟手上的注视点),从而影响接下来可能选择哪些动作(例如,手以特定方式抓握)。虽然有多种解释,但该模型的一些证据可能会在精确估计中找到,该精确估计受到来自额叶中线结构的 theta 功率和来自额顶网络的 beta 功率之间的功能相互作用的影响 [127],这里可能会(推测性地)解释 分别指示与面向动作的身体图的其他方面相互作用的虚构中心点(表2)。在某种程度上,部分表达的动作为自上而下的注意力提供了基础,我们可以通过关注以动作为导向的身体图来有意影响注意力,从而推动进一步的关注和意图模式。在这一级联的跨模态预测中,真的有意向性的空间吗?这个问题的答案将取决于我们如何定义意图,这里代表了能够影响神经元活动选择的有意识欲望的任何实例。当这些过程由涉及叙事自我模型和相关概念的目标驱动时,可以进一步说类人意向的出现,如下文将更详细地描述。
4. The Emergence of Conscious Teleological Agents
[注:在下文中,“意识”一词有多种含义,有时涉及基本的主观经验,有时涉及对经验的知识、可操作性和可报告性的有意识访问[168]。除非另有说明,这些讨论可以被认为是指两种意识。有关现象意识的物理和计算基础的更彻底的讨论,请参阅综合世界建模理论[73,74]。
4.1. Generalized Dynamic Cores
“新生儿要做的第一件也是最基本的事情是什么?如果一个人认同自由能原理,那么它唯一要做的就是解决其外感受、本体感受和内感受的原因的不确定性……正是在这一点上,自我的重要性显现出来——从某种意义上说,最好的感觉是 对沉浸在环境中的有知觉生物的感觉的解释必须区分自我(生物)和非自我(环境)。由此可见,结构学习的首要任务是区分可以归因于自我的感觉的原因和那些不能归因于自我的感觉的原因。。。这里提出的问题是,最小自我的概念或体验是否取决于选择(即学习)区分自我和非自我的模型,或者它是否需要将代理划分为自我、他人和其他一切的模型。
——卡尔·弗里斯顿 [88]
“[我们]将意识和梦的清醒度定位于执行功能额叶皮层。我们假设该区域的激活对于自我意识至关重要,并否认任何“我们的额叶皮层中坐着一个小人”或“一切都聚集在一起”的说法。我们只是坚持认为,如果没有额叶激活,大脑就不是完全有意识的。总而言之,我们可以说,也许是挑衅性的,(自我)意识就像一个剧院,只要额叶被激活,人们就可以观看一场戏剧。清醒时,“游戏”包括外部世界。在清醒梦中,“游戏”完全是内在的。在这两种状态下,“游戏”都是一种模型,因此是虚拟的。但它始终是身体上的,并且始终是基于大脑的。”
——艾伦·霍布森和卡尔·弗里斯顿 [11]
控制论贝叶斯大脑也已扩展到现象学,为从代理感到联觉感知等经验的定性方面提出了可能的解释。“存在”(或主观真实性)的感觉被认为与自主和运动动作引起的信息性内感受信号的成功预测性抑制相对应,产生与自我生成的动作相关的代理感[154]。自我生成行为的历史允许“掌握感觉运动偶然事件”[169],与诱发的可供性相关的预测能力(即“反事实的丰富性”)的程度和多样性决定与体验的各个方面相关的存在程度[ 61]。
据推测,反事实的丰富性可能会通过意识意识几乎无法触及的微观想象来促进感知存在。也就是说,感知可能总是涉及相关的可供性关系,但由于其转瞬即逝的性质,这种想象可能无法有意识地访问(例如,后模态上的单个综合阿尔法复合体未能更广泛地整合到连贯的因果展开中)。然而,这种模拟的可供性仍然可能有助于对感知的不同方面及其多模态关联(例如,可能的内感受后果)的注意选择,从而产生伴随着特定意义的可能性的半影。这种无法访问的现象性模型对于理解能动性的多个方面可能至关重要,其中有意识地体验到的孤立的感受性可能会对思想产生强烈的影响,提供令人惊讶的丰富的“无意识”处理来源。
或者,反事实丰富性与知觉存在相关的部分原因可能是因为这些(非实际)与可供性相关的预测无法抑制自下而上的感觉。想象中的感觉运动意外事件会产生预测错误,因为它们无法与实际的感觉观察保持一致,如果它们到达具有丰富的俱乐部连接的更高层次的皮层,就会影响意识体验[104,170]。这些子网络的显着之处在于具有高中心性和高互惠(或可重入)连接性,这被建议支持相互维持激活模式的“动态核心”[6,171],因此实现“全局工作空间”[172 ]能够整合和区分[173]现象的多个方面,具有足够的时空和因果组织,以进行连贯的意识建模[15,73,74]。
虽然这里提出的意识机构的描述是彻底体现的,但它与预测处理的更激进的行动主义“扩展思维”解释分道扬镳[174]。根据主动推理的激进行动主义解释,主观体验是隐含模型的蕴含,该隐含模型由有机体的大脑、身体和环境内的整个层次结构关系系统所代表。然而,我认为,过程对意识的贡献程度仅取决于它们在时间尺度上与神经活动的动态核心相结合,在这些时间尺度上,信息被整合到特定的大规模亚稳态中[73,74],并且通过以下机制增强了一致性:稳定和协调同步活动[175,176]。虽然思想确实是扩展的[177,178],但意识可能是一种时空更为有限的现象。
意识的动态核心可能在贝叶斯大脑中发挥另一个核心作用:
稳健和(亚)稳定预测的来源。有意识地驱动神经动力学可以实现一些如果没有集中控制过程就不可能实现的特性。信息的广泛可用性(通常采取具体模拟的形式)允许与语言产生系统及其组合和递归生成潜力耦合,这将极大地提高主动推理的稳定性、复杂性和灵活性。在某种程度上,这些扩展的能力允许推断时间上延伸的事件,它们可能为构建抽象自我模型和一种新的符号秩序提供基础[13,179]。在这种有意识的象征体系下,一种新的动态核心成为可能,作为具有扩展因果展开和抽象知识结构化的世界模型。这种广义的动态核心将由相互维持的预测系统构成,当相交的预测组合在一起时(例如,汇聚的证据线)提供协同更大的推理能力,其鲁棒性就会增加。
我建议体现自我模型(ESM)作为在多个层面上构成自我维持的稳健推理核心。在较低的抽象层次上,最小的 ESM [180] 对应于根据第一人称视角参考框架组织的身体图。在更高的抽象层次上,更精细的 ESM 对应于第三人称视角的身体地图和图式。这些第一人称和第三人称视角的 ESM 都在主体间的社会背景下发展,可能通过第二人称视角的内化[181]以及与他人(或由他人)进行镜像[182,183]。核心自我的基本方面——具有具体化和象征性的客观化特征——可能涉及一种第一人称与第三人称ESM的内部“镜像”,因此为高级自我建模建立有效连接的联系(参见镜像自我) 通过经验,这些不同的 ESM 彼此关联起来,作为一种控制异构体,受不同抽象层次上的不同自我模式的支配。
能够实现这些不同自我过程的神经群体还将在语音动作感知周期上与下额叶和颞叶层次结构建立相互联系,以发声器官的相应输出和听觉的输入为基础。这些功能联系将为基于句法语法的语义理解提供基础,这可能允许像前面描述的内部语音一样思考。从这个彻底体现的角度来看,语言思维是一种运动技能,它部分地将陈述性知识视为程序性记忆的一个特例。这些符号能力提供了更复杂的组织模式,其中ESM采取叙事增强自我的形式[111,156],具有几乎无限的符号潜力[184186],包括多层次的人际耦合[187,188]、参与性意义建构和共享意向性[189,190], 并通过抽象意义构建经验[121,148,191]。
我建议我们可以从博弈论上解释“动态核心”[192],并将这个概念扩展到各个层面上构建思维的新兴模式。在自由能原理下,所有持久的形式都必然使预测误差最小化,并且随着模式竞相促进其存在,这些相互作用将构成一种兼具合作和竞争特征的博弈。每当一组预测变得足够稳定以至于能够在信念空间中充当一种主导范式[193]时,就会建立一个“核心”。这个核心属性可以因为模型和世界之间的一种忠实对应而获得,或者仅仅因为它在发展的早期出现并因此构建了后续的模型(无论准确与否)。具身自我是提供广义核心的良好候选者。对异质感觉之间的相关活动进行简约建模,无论是内感受、本体感受还是外感受[75]。我认为 ESM 为经验提供了如此有力的解释,以至于它们为心灵的所有其他方面形成了必要的脚手架,自我的不同方面被理解为各种扩展的体现 [194-197],从物质财产 [198] 到社会角色 ,以及其他更抽象的自我意识和所有权意识[111]。从这个观点来看,心理发展将通过保留和适应各种核心模式(用新皮亚杰主义的术语来说,同化和适应)来重新构建,从而允许思想引导自己走向日益稀有的复杂状态。
在这些发展里程碑中,也许最重要的重大转变是获得自我意识的能力[199]。正如上面关于镜像的潜在重要性所建议的,这种自我模型可能通过涉及各种形式的主体间推理的社会互动的内化而发展。虽然自我的丰富性不应该被简化为任何给定的机制,但对动作感知周期的关注阐明了各种神经系统可能有助于构建(和控制)不同的客观化自我表征的方式。如果有足够的经验,第一人称参考系中想象的动作将伴随着与从其他角度对类似动作的感知的自动联想联系。这些不同的观点被腹侧视觉流神经元群“编码”,这些神经元群可以通过后内侧皮质有意识地访问[73,74]。有意识的第三人称自我表征提供了复杂突发事件的建模/控制和导航的附加形式,例如想象多步骤计划,可能伴随着穿越空间时间的可视化。[推测,连接背侧和腹侧皮质层次结构的白质束的进化阐述可能促进了这种视角交叉映射[200,201]。
客观化的自我代表了进化中的一个重大转变,表明从一阶控制论到二阶控制论的运动,其中代理变得能够使用自我调节过程将自己递归地建模为寻求目标的自我调节反馈系统[202]。因此,从根本上体现的视角不仅可以帮助我们理解有意的目标导向行为的微观机制,还可以帮助我们理解自我意识的本质和潜在的人类独特的代理形式。这种通过心理行为构建具有元认知能力的自我也表明,代理机制受损会导致不同形式的适应不良功能和精神病理学[203]。这种构建的自我也暗示了可以更新病态自我过程的方法,可能是通过有意定向关注上述作为冥想实践的原型模型的躯体状态[166,167]。
4.2. Embodied Self-Models (ESMs) as Cores of Consciousness
4.2.1. The Origins of ESMs
总而言之,ESM 可以为众多不同的心理过程形成基础核心和脚手架,从处理欠约束的推理空间到有意识地控制注意力、想象力和行动。ESM 既是身体地图,又是控制论控制层次结构,由基于骨骼肌和相关感知传出的动作感知循环构成(图 6)。如上所述,ESM 的中心地位是基于早期经验 [84,204],其中机构提供了学习课程,其中可能性受到有效限制 [38],因此允许有机体引导自己的方式来处理最近发展区域内日益具有挑战性的建模空间 [120]。关于构建强大的因果世界模型的挑战——既能够实现也可能需要意识体验[73,74]——无约束推理空间的组合可能只能通过具体学习提供的归纳偏差来克服。这种根本上的躯体发展遗产提出了一种激进的观点,其中 ESM 为所有有意(和许多无意)心理过程形成了一个半集中的脚手架,将抽象的象征思想扎根于心理模拟和从最初的具体体验的隐喻延伸中[47,48]。
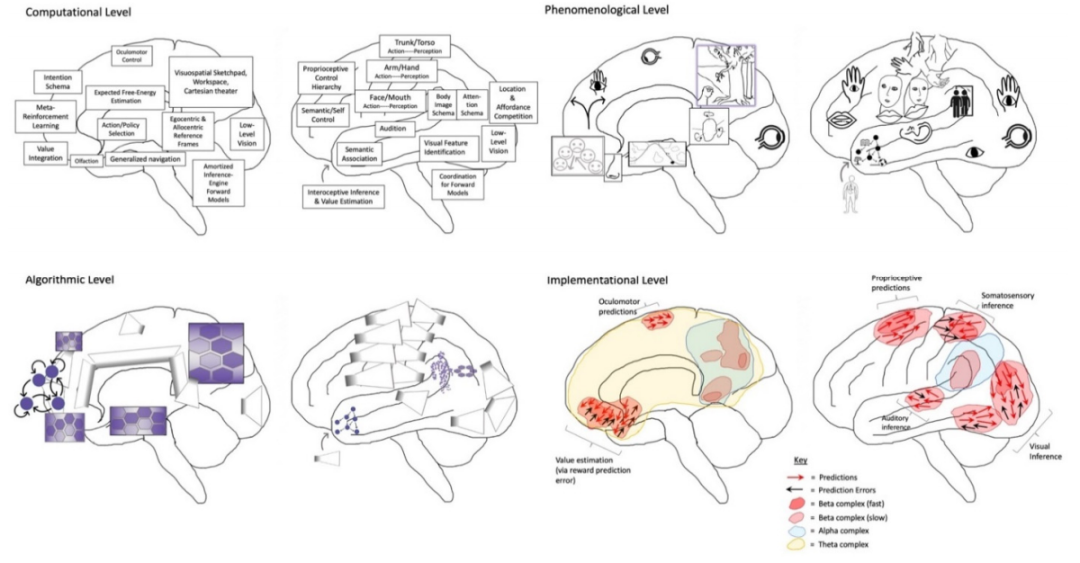
Figure 6.图 6. 从经验的必然方面(即现象学)以及分析的计算(或功能)、算法和实施级别来描述人脑[2,74]。现象学层面被指定为提供意识与这些补充/附带的分析层面之间的映射。莫代尔描绘意味着心灵的根本体现本质,但并非所有图像都旨在表明意识体验。现象意识可能仅由以后内侧皮层、边缘上回和角回为中心的层次结构产生,作为各自的视觉空间(参见意识作为射影几何) 建模)[181,205],躯体(参见基础认知和中级理论)[3,206,207],以及意向/注意现象学(参见注意模式理论[118]。计算上,根据特定的模态方面识别各种大脑功能,或者尊重 产生感知(无意识和有意识)或行动(无意识和潜在意识,通过后生成模型)。[注:动作选择也可以通过后皮质的可供性竞争发生[94],额叶生成模型可以解释为 一种前瞻性(无意识)的感知,通过参数化后生成模型的反转使想象成为有意识的。]在算法层面,这些函数被映射到机器学习架构的变体上——例如,自动编码器和生成对抗网络、图 神经网络(GNN)、循环储存器和液态状态机——根据神经系统的潜在实现进行组织。GNN 结构的潜在空间被认为是一种潜在的重要架构原则 [208],这主要是由于模拟物理过程的效率 [209-211]。六边形组织的网格图 GNN 在后内侧皮质中被描述为有助于准笛卡尔空间建模(和潜在的经验)[212,213],以及在背内侧和腹内侧前额皮质中用于代理控制。神经影像学证据表明,这些网格可能以各种方式动态耦合[214],作为一种通过广义空间的导航/搜索过程,有助于高阶认知[215-217]。据推测,进一步的 GNN 位于边缘上回,作为放置在初级感觉运动小人的变换表示之上的网格(参见身体图像/模式,以实现有效的运动控制/推理)。这种准同体 GNN 可能与从内部感受到的实施例有一定的比例对应关系,可能会变形/重新表示以更好地与外部查看的实施例相对应(可能是由其他实施例产生并实现与其他实施例的“镜像”)协调和推理代理)[39]。据推测,这种部分转换为准笛卡尔参考系可能与后内侧皮质中的半地形组织表示提供更有效的耦合(或信息共享)。角回被描述为包含一个环形 GNN,以反映更高层次的抽象和对面向行动的身体模式的分层控制——这可能会调解连贯的功能耦合在“活体”和“心灵之眼”之间——功能上需要注意(和潜在有意)过程上的向量/张量[218]。[注:预测处理的语言提供了实现和计算(以及现象学)级别之间的桥梁,但向量场和吸引流形等描述也可以用来保持不可知论,即物理动力学可能需要哪些隐式算法。]在实现层面上,算法过程的生物实现被描述为对应于神经元群体之间的活动流和相互作用,通过亚稳态同步复合体(即“自组织谐波模式”[73])的形成进行疏导。[注:本手稿中讨论的其他模型并不依赖于这些假定映射的准确性,也不依赖于集中式侏儒和与现象学具有半地形对应关系的“笛卡尔剧院”的假设机制。]。
如上所述,ESM 提供了影响行动选择的方法通过对感知和想象的感觉运动状态的迭代比较,通过目标的向后链接实现非常复杂的规划,并通过预测编码机制实现。意图(作为自我毁灭的自由能梯度)被认为是神经动力学的系统原因,通过信念和欲望之间的相互作用而产生,作为反事实的主要内感受信念。此外,ESM 底层的神经元集合——以及它们支持的中间层表示[3,206,207]——可能被定位为生成神经网络中位于中心、连接丰富的节点。由于实施例在功能上与感官观察的大多数原因相关,ESM节点之间的连贯组织将有助于小世界连接,从而增强消息传递潜力,从而增强信息集成的能力。因此,除了构成大多数心理过程的核心之外,ESM 还将处于神经活动动态核心的中心 [73,74,219],生成高度集成的信息 [173,220] 并实例化全球工作空间的通信骨干 [ 221,222]。
关于通过 ESM 进行工作空间动态的假设,值得注意的是,高模块性和低模块性的时期根据感觉运动和视觉网络内的活动程度而变化最大[223],这可能表明这些系统在大范围内发挥着关键作用。衡量认知周期[224]。感觉运动网络构成最广泛的静息态组成部分,涉及总体灰质的 27%[225]。更重要的是,这些体细胞网络建立了功能连接的核心 [226],与其他功能网络具有高度重叠和耦合活动, 包括默认模式网络,因此可能将有意识的工作空间动态与多个层面的自我联系起来[227-230]。
4.2.2. Phenomenal Binding via ESMs
ESM 之间的高度互信息可能会增强自组织同步和推理稳定性的能力 [204]。事实上,以身体为中心的神经反应的早期出现(就个体发育和系统发育而言)表明它们可能是体外形式的知觉推理的基础[91,231]。就发育首要性而言,斑马鱼的研究表明,脊髓运动神经元开始建立全局同步动态的刻板过程,首先是可靠地提高同步局部活动的程度[232],然后是更大规模的整合(或 当超过临界阈值时,自组织)进入明确定义的振荡模式[233]。通过身体图的高度整合能力可能有助于解释神经系统在良好(例如受伤后恢复)和疾病(例如幻肢综合症)方面重新配置自身的非凡能力[194,234,235]。
理论上,当功能耦合时,ESM 可以将其一些同步(和推理)稳定性转移到非身体表示(例如外部对象)。这种耦合可以通过反应性配置和感知可供性来驱动模拟(有时是公开制定)的行为来实现[94,95]。可供性关系必须在神经元群体中具有物理基础——即使是高度动态和上下文敏感的——由动作感知循环的表示构成,以身体效应器和传感器为基础。如果非身体表征通过可供性关系自动关联到 ESM [71],那么 ESM 内的同步动态可以传递非身体表征的神经集合,从而提高其感知稳定性。就感知绑定而言,特定的可供性可能有助于特定的同步模式,从而实例化特定的整合网络,这在某些情况下可能需要非凡的体验和潜在的意识访问。[注:本手稿中讨论的其他模型并不依赖于通过 ESM 进行现象结合的假设的准确性。]
从机制上讲,来自ESM的行波[236-238]可以形成形成大规模亚稳态节律吸引子的主要成核点[229,239-242]。这种自组织谐波模式可能在神经系统内具有多种功能意义[ 73,74],包括协调大规模大脑活动模式的能力。这种通过模拟体现参与的共振结合模型进一步表明,具有特定可供性联系的部分表达的运动预测可用于对特定对象的注意力选择。从这个角度来看,对“最佳握力”[89]的行动主义讨论可能潜在地表明了一种通过虚构的运动命令实现有意识访问的基本机制。与语言使用一致,可能存在一种令人惊讶的(或者可能是直觉上的)有意义的感觉,在这种感觉中,我们用注意力“保持”在脑海中的物体(作为部分表达的运动预测),可能为术语“概念”一词提供神经计算理解 其词源学起源(即“掌握”)。
ESM 被提议形成意识核心,作为整个大脑整合有效连接的主要来源,促进连贯的感知和行动。以 ESM 为基础的意识不仅会给所有知觉注入感觉运动偶然事件的可供性潜力 [169],而且 先前讨论的“存在”感是来自反事实丰富性的感知深度[154,243],因此阐明了现象学的基本方面。如果这种虚拟主动绑定和感知操纵的模型是准确的,那么我们可能会对额叶在全局工作空间动态和高阶意识方面的作用拥有另一种解释。虽然后皮质可能产生空间的意识体验 [73,74,212],但额叶皮质可能以稳定和操纵这些心理空间内的感知的形式为认知“工作”提供基础(图 6)。
这种彻底体现的观点得到了一些研究结果的支持,其中运动信息严重影响几乎每种模式的神经信号传导[244-246]。值得注意的是,顶叶皮层提供了高级身体表征和空间意识的来源,并且不会造成损害。不仅会导致失认症和异肢综合症,还会导致半空间忽视[218]。还有一个反直觉的发现,通过为与受影响的空间一侧相对应的手提供伸展工具来扩展忽视症状的空间范围[195,247]。据推测,通过 ESM 进行的基于可供性的绑定可能为这种令人惊讶的现象提供部分解释,因为忽视症状可能是由于与 ESM 的耦合而导致的,而 ESM 的连贯(同步和推理)动态已受到损害。感知和 ESM 之间的共振耦合也可能有所帮助 解释外部对象(可能包括其他代理[248])如何合并到身体地图中[249],并通过同步运动帮助建立扩展/绑定。这些现象性的根本体现基础也可以通过出体状态的记忆受损来(间接)证明[250],以及伴随第一人称观点的卓越记忆[251]。
Graziano 及其同事最近的工作可能为这种通过基于 ESM 的可供性的感知绑定模型提供支持。在注意力图式理论(AST)[118,252]中,意识意识被认为对应于注意力的降维示意性建模,提供了相对于建模的更容易预测和控制的信息对象。注意力图式的草图性质使它们无法进行清晰的内省,因此导致了一种异常的推论,其中意识被隐含地(有时是明确地)视为一种流体状的物理物质,从人的眼睛中出来并延伸到大脑中。世界,因此助长了“视觉感知的外传神话”。来自 Graziano 实验室的研究人员 [253] 发现了一种有趣现象的证据,即看到另一个人的目光似乎会导致力向不稳定物体转移的推断。这一发现与上述基于 ESM 的感知结合模型一致,尽管实验的变化可能提供一个机会来独特地测试此处提出的假设。根据 AST 的“眼束”模型,与凝视相关的隐含力应该始终是推动力——由于隐含的异常推论,意识就像一种可以发射的液体——导致物体更有可能从 然而,根据 ESM 的现象绑定模型,该力要么是推,要么是拉,具体取决于相关的可供性和可能的情感状态。
在 AST 中,意识意识被认为是注意图式及其偏向表征的现象蕴涵。在此处描述的彻底体现的视图中,注意力模式将代表以行动为导向的第一人称身体模式的上层控制层次结构 [118],或 ESM 作为分布在额叶和顶叶皮层的动作感知层次结构(图 6) 。神经心理学文献为这一观点提供了一些支持,额叶和顶叶病变都会导致忽视症状[254]。AST [218] 中意识意识的颞顶交界处 (TPJ) 的中心地位表明,建立具身自我和意识意识的网络之间可能存在功能重叠。值得注意的是,TPJ 破坏可能导致知觉异常,例如灵魂出窍和身体转移错觉 [255,256]。精神状态推断[257]与TPJ(和背内侧PFC)中自我和他人的重叠表征之间的关联为上述客观化自我的社会引导提供了进一步的支持。无论是通过“镜像”还是通过自我和他人之间共享的注意力模式进行换位思考,高层次的以行动为导向的身体图对于试图推断心理状态和意图可能是必不可少的[118,121,190,258–260]。因此,意识访问可能不仅取决于根本上体现的思想,而且还可能从根本上涉及主体间建模[187,188,261]。
4.2.3. Varieties of ESMs
“我们认为,小人概念的一个有用的概念空间可能位于大脑不断参与的许多并行过程与其他人的输入、顶层交互之间的联系处。在这种理解中,假定的小人的角色就变成了双重看门人之一:一方面,在那些许多并行过程和参与的少数人之间,另一方面在一个思想和另一个思想之间……他的感觉 从外部角度来看,控制力和一致性确实看起来是虚幻的。然而,从个人的内部角度来看,它似乎是行动和感知的非常重要的锚点。如果我们没有这种控制我们行为的内在小人的经验,我们的自我意识就会融入我们周围的文化中。”
——安德烈亚斯·罗普斯托夫和克里斯·弗里斯 [12]
在这种情况下,ESM 充当 FEP-AI [75] 中最大模型证据的来源、综合信息 [173,220] 以及全球工作空间的支柱 [129]。这种以 ESM 为中心的意识和能动性观点与以下观点一致:信息封闭[262]和中级[207]意识理论。中间的抽象层次提供了具体的模拟[3,206,263],其中动作-感知循环实现了控制论的意义建构和基础认知。事实上,通过 ESM 实现的控制论基础可以部分帮助解释为什么意识可能“仅在
个人水平”[264]。
ESM 由不同抽象级别的多层控制层次结构组成,范围从第一人称界面,即“活体”[43,181],到能够充当符号和自反意向控制器的第三人称身体模式。单一的体现自我和自我模型作为“叙事重心”[228,265]意味着统一的体现表征作为高级控制过程的多重角色,根据多个视角参考框架进行组织。这些自我和世界模型的复杂性和特异性因语言的组合和递归特性而大大扩展[156,179],包括通过组织成历时叙事来实现时间延伸和稳定[184]。虽然意识的实现可能不依赖于语言,但语言能力可能对意识、自我和能动性的进化和发展产生深远的影响。
通过自我的多级整合可以通过提供来自核心实施例的绑定来代表感知一致性的必要条件。类似地,根据重整化群理论和协同学的奴役原理[266,267],自过程在时间中稳定持续的能力提供了降维,吸引能够为更快的动力学带来秩序或产生选择性压力的中心流形 在组织的较低级别。一组更慢、更大、更集中的动态具有不对称的潜力,可以带动(或奴役)更快、更短暂的过程,由于其瞬态特征,这些过程相对不太可能产生凝聚力影响。自过程可以被视为生物物理动力学上高度相干的中观和宏观尺度向量(或有效场论[268])的来源,允许系统以没有集中式综合结构就不可能的方式探索状态空间。
自身为多个复杂序列提供空间和时间结构抽象层次,包括象征性的。这种抽象的综合结构被称为“叙事”[184,269,270],这种组织模式促进学习并非巧合,而且讲故事和听故事的行为是人类的普遍现象[271,272]。就控制系统而言,叙事允许以提供多级语法的方式使不断发展的概念结构保持连贯稳定,从而提供多个时间和空间尺度的规划。多尺度组织的叙事提供了建模和控制此类扩展过程的最佳方法之一,包括有助于生成自我模型并受自我模型控制的叙事过程。通过这些方式,主体自我是一个随着讲述/表演而变得(或多或少)真实的故事。
最基本的是,自我是由体现和嵌入外部环境的模型构成的。在最复杂和抽象的[273]中——回到上面描述的关于广义动态核心的进化博弈论考虑——自我是类代理系统最一致地被识别的模式,其中代理系统是根据 一种预测的修正主义胜利者历史[14,265,274],其中胜利者是由主导模式联盟构成的,通过习惯、叙述和代理人构建的特定利基之间不断发展的相互作用而结合在一起。跨时间连贯的信念-欲望联盟更一致地实现更高的价值[275,276],因此往往会得到强化,因此往往会主导角色演化[60]。与这些模式联盟共同演化的共享叙事[271,277,278]是由个体内部[279-281]和个体之间[121,269,282]的重复博弈形成的。尽管自我过程可能以这些方式变得极其复杂(和抽象),但在所有情况下,此类生成模型都源于并且必须不断处理其根本体现本质的约束和可供性。
4.3. Free Energy; Will Power; Free Will
多级动态核心的自我维持稳定性和预测能力构成了自由能量库[73,283],能够奴役较低层次的层级,从而驱动整个系统朝着想象中预测的新颖(且令人惊讶)的状态空间区域发展。通过这种预测处理模型,意志力与代理人在面对实现目标的障碍时预测/想象达到期望状态的行动的强度成正比。上述具体注意力机制提供了以有机体为中心(并且可能更直观可控)的方法来增强特定表征的预测能力。这些分布式高级控制器必然是从预测性稳态调节(即通过主动内感受的动态平衡)的历史中发展而来,主要集中在跨越岛叶和扣带皮层的控制层次结构[284,285],它通过与下丘脑和下丘脑的直接和间接连接来影响神经调节值信号。脑干核[286,287]。
这里提出的彻底体现的建议是,所有自我控制过程都起源于控制骨骼肌,既通过多级共享机制,又通过运动经验的隐喻延伸[288]。在某种程度上,这些调节动态取决于特定的神经解剖学中枢,意识意愿构成有限的资源,持续的活动会导致有效预测的退化。这与避免“自我耗竭”所需的休息时间一致[289],可能是通过涉及这些中枢内的慢波活动和突触缩小的机制[290-293]。基于上述模型,这些执行资源将在很大程度上依赖于用于模拟不同复杂程度的动作的网络,其中虚拟的注视点和虚拟运动操作可能特别有影响力(表2)。背内侧和背外侧前额叶皮层提供对额叶眼区和前补充运动区的高阶控制[74](图6),这些区域都与注意力和工作记忆相关[125,294,295]。如果执行失败(和恢复)通过缓慢振荡的局部增加(以及随后随着休息而减少)可靠地索引,以及如果刺激[296]应用于这些区域——或者可能是其他综合网络,那么这些模型的强有力的证据将会获得。[297]——被发现可以增强自我控制力并促进休息期间的补充。
然而,即使没有耗尽有限(但灵活)的神经资源,基于持续动态的显式和隐式预测模型,持续意愿也可能会被预先限制[298]。在目标追求的背景下,情绪状态反映了与各种目标相关的推断收益和成本之间的平衡[162],包括机会成本的估计,这对激励/激励(或抑制)行为有直接和间接的影响。这些主动监管机制很大程度上源于孤立的
扣带皮层作为预测稳态(即变稳态)控制系统,以及神经调节过程(例如脑干的多巴胺神经核)的额外汇聚输入,从而影响神经元活动级联和随后的明显行为的阈值。
其他自我控制限制可能很难用特定的神经系统来描述,但可能会出现在与目标追求相关的价值实现的异质预测中。例如,可能的情况是,自我过程在头脑中变得更加因果有效,以至于它们被预测在世界上具有因果有效。通过这些方式,意志力、特定情况的自我效能甚至整体自尊之间可能存在双向关系。
一个彻底体现的控制论贝叶斯大脑提出了多种机制,通过这些机制,我们可以说(在一定范围内)拥有“值得拥有的各种自由意志”[299]。虽然关于自由意志本体论地位的争论可能无法在这一点上得到明确解决 在手稿中,我们已经证明,意图——作为联合的信念和欲望——可以在其作为连贯稳定的预测的能力中发挥因果作用。在面对不一致的观察结果时,这些预测能够维持在一定程度上,这些控制能量来源将驱动整体动态。因此,有意识的心理状态不仅是“真实模式”[300],因为它们对于体验主体具有重要意义,而且因为有意识地“持有”意图可能对认知(以及潜在的热力学)工作周期做出有意义的贡献[13,73,301,302]。
4.4. Mental Causation
这种心理因果关系可以用广义的语言来类似地描述。达尔文主义[279],偏好在头脑中因果作用,就像选择压力[303-306]在进化系统中因果作用一样[17]。更持久的偏好可以被视为最终层次的原因,选择特定情境的邻近层次选择的发展[307]。我们可以进一步根据选择过程的层次结构来考虑通过层次预测处理的运动控制。在这种将行动选择视为一种自然选择的观点中,较低层次的层次为实现较高层次的选择压力提供了具体的适应,其总体构成了任何特定时刻“意志”的总体方向。在更长的时间尺度上,经验的历史会改变信念和欲望,因此提供了另一种方式,使偏好作为多层次进化系统的思想(递归地自我修改)原因。
有趣的是,当在贝叶斯模型选择、自然选择和热力学的背景下考虑时,“压力”的概念和自由能梯度驱动做功的能力可能是同构的[308-310]。尽管事后协商发生[311,312],但在许多情况下,通过意图驱动行为可能被视为(形式上)类似于通过受控爆炸为发动机提供动力。此外,在自由能原理[158]的规范理论框架中,精确加权被正式理解为一种(保持对称性)力,其含义与重力是时空变形产生的力完全相同。因此,欲望和意志力可能是“力量”和“力量”这两个词的各种有意义的意义上的力量。
像信仰和欲望这样看似短暂和抽象的事物是否有因果关系?权力与物理学中的含义相同吗?也许这只是语义游戏中的一种练习,玩弄隐喻和词语来避免明显且不可避免的结论:唯一真正的因果关系是物理原因,任何其他意义上的原因都只是权宜之计,代表了对事件的近似尝试,其解释和预测的事件 潜在的现实过于复杂,我们难以衡量和理解。也许。然而,“原因”、“力量”和“力量”本身也只是它们试图以压缩形式表示的现象的词语、隐喻或模型,如果没有它们,它们将缺乏解释或预测效用。降维 ap 近似[48,59]。有时我们需要记住,词语的含义是由我们互动的思想决定的,其中它们总是(无一例外)仅仅是权宜之计——即使这种权宜之计也提供了文明的进化和我们赖以生存的技术[271] 。物理学中大多缺乏“原因”这个词,因为大多数物理学家不需要挑选出特定的事物来解释或预测特定的事件[268]。动力学主方程可以被指定,例如哈密顿方程和拉格朗日方程,系统演化从中确定性地流动,但在此类描述中找不到因果关系的概念。鉴于物理定律相对于时间对称,并且时间可能是一种新兴的局部描述,而不是宇宙的基本原理,物理学中因果概念的缺失是有意义的[313]。甚至“力”在基础物理学中也被贬低了,取而代之的是概念化中的“虚拟力”,例如相对论和其他场论下的规范结构[158]。由于这些理论在概念上的优雅,许多物理学家不再谈论“虚拟”力,因为可以说不存在其他类型的力
也许更根本的是[314],如果我们追溯这些概念的谱系,从而理解心灵的根本躯体起源,那么我们可能会发现我们的原因和力量的概念最初是通过隐喻延伸从意志控制的具体经验中衍生出来的。16,48,59,288]。这并不是说可以犯谱系谬误,并将这些概念的现实还原到最初。因果关系的正式说明已经通过图形模型的操作提供,涉及通过反事实干预来操纵依赖关系[119]。然而,这种处理需要对给定本体的承诺(即,将域划分为特定类型),并且不支持将过程简化为更细粒度的动态,其中更高级别的属性未定义。即使时间性被认为是基础性的(而不是突现性的),能够为某些“真正的原子论”提供因果模型,还原性解释仍然不会是一种消除性的变化。对新兴现象(例如意向性)的排除性观点可能实际上是毫无意义和无意义的,因为它们违反了使意义建构成为可能的逻辑推理规则。
换句话说,意图(作为联合的信念和欲望)可以被视为一种关于心理动力学和行为的“有效场论”[268],提供最有力的方式来解释和预测事件,而这些事件的基础统计数据提供(并要求)粗粒度 [315]以产生新本体的方式。通过这些方式,信念和欲望与任何“事物”一样真实[64],即使相对于粒子等“事物”而言,存在更广泛(但仍然受到限制)的看似有用的解释。然而,对这些更稀有的新兴现象背后的形式属性的正确理解——如广义进化[308,309]——可以在所有类似配置的物理系统之间共享。因此,从这些词的每一个有意义的意义上来说,我们的意图确实是原因、力量和力量的源泉。我们的意图是真实的模式[300],我们也是。
5. Neurophenomenology of Agency
5.1. Implications for Theories of Consciousness: Somatically-Grounded World Models, Experiential Richness, and Grand Illusions
“就我而言,当我最亲密地进入我所谓的自己时,我总是偶然发现一些特定的感知或其他感知,热或冷,光或阴影,爱或恨,痛苦或快乐。我永远无法在没有知觉的情况下随时捕捉到自己,也永远无法观察除了知觉之外的任何事物。当我的知觉随时被消除时,比如熟睡时;我对自己麻木不仁已经很久了,甚至可以说我根本不存在。如果死亡消除了我所有的知觉,如果我在身体消融后既不思考、不感觉、不看、不爱、也不恨,我就会完全毁灭,我也无法想象会发生什么。是使我成为一个完美的非实体的进一步必要条件……但是,抛开一些此类形而上学家,我可以大胆地肯定其他人类,他们只不过是不同知觉的捆绑或集合,它们继承了每一种知觉。其他事物以难以想象的速度发生,并且处于永恒的变化和运动之中。”
——大卫·休谟 [316]
正如之前的工作[73,74]中所述,意识可以被理解为支持全球工作空间的思维能力[317],由竞争和合作模式的动态核心定义[171,219],它依赖于但不是 与系统的集成信息相同[173,220]。然而,这里描述的深度体现的观点表明,对于有意识的系统,集成信息必须应用于具有基于经验的意义的表示。这些表示不需要是明确定义的符号,但它们的符号内容可以通过动作感知周期的协调以控制论的方式蕴含。神经元复合体可以具有任意大量的集成信息,但它可能没有意识,除非它也涉及系统外部的模式。意识能力可能与来自动态和表征内容的综合信息成正比(但不一定由其定义)。意识的主要适应性优势之一可能是实现表征——通过计算实现集成和差异化动态的平衡——其演化的时间尺度与系统试图控制的世界事件大致成比例,从而实现基于控制论的意义创造。[为了在时空尺度上感知动态,而更直接的耦合是不可行的,我们可能需要(具体的)隐喻,例如可以在时间的空间化中使用[318,319]。]按照这种观点,“感受性空间”中的信息对象[ 320]由于与身体感觉上的生成模型的概率分布同构,因此将具有惊人的内容,这些系统通过与嵌入环境的交互而进化发展。因此,从根本上体现的观点对于解释综合信息是否暗示有意识的经验的情况可能是至关重要的。
这里提出的模型也与高阶思想[321]一致强调额叶在意识和意识中重要性的理论意向性,其与顶叶(和颞叶)区域的功能连接可能对于稳定表征内容至关重要[6,11]。前额叶皮层的前部在为整个大脑建立小世界连接方面可能特别关键/中心[170],因此提供了大规模(灵活)的信息可用性。虽然该区域在灵长类动物中的连接可能特别好[322],但相对于非人类灵长类动物,该连接组中枢在人类中可能有独特的扩展[179,323]。然而,一种激进的具体化观点表明,前额叶中枢可能不仅仅建立了 全球连通性。相反,这些系统可能专门充当层次结构的上层,通过模拟动作和部分表达的运动预测来塑造动态(图 6),从而为有意控制提供基础。这样,
额叶服务于“执行功能”可能不仅仅是一个“纯粹”的比喻,但也可能是对以身体为中心的机构为中心的准同体层次控制架构的恰当描述。我们甚至可能想要重塑“访问意识”[168]的概念,以依赖上述各种虚构的心理行为来实现元认知和概念思维,将其理解为抽象的运动技能,可能涉及通过具体化产生的共振现象结合自我模型(ESM)。
正如之前的工作 [73,74] 中所描述的,不仅可能存在某种笛卡尔剧场,而且感知可能会在这个虚拟现实屏幕上/中重新呈现(图 2 和 4-6)。此外,如上所述,准同体 ESM(作为多模态动作导向的身体地图)将通过部分表达的运动预测、模拟中心凹和其他虚构动作(表 2)来内省这些空间的内容,从而提供这两种行为的来源 (a)注意力“聚光灯”,以及(b)意图和行动的连贯向量。然而,这种统一的体验场的范围是多少?我们实际上填充了一个完整而丰富的模拟环境,还是这种主观体验是某种“大幻觉”,实际上我们只填充了环境的局部方面 以一种特别的方式[8,324-326]?与其一次性填充完整的感觉中枢,我们是否可以生成反映伴随我们实际感觉运动参与的感觉敏锐度的感知,这可能是令人惊讶的有限(例如,与视网膜焦点区域提供的狭窄视野成比例) ?
诸如看不见的眼睛盲点之类的现象表明发生了一些知觉填充,而大脑的生成模型可能非常适合提供这种填充[73,74]。然而,这种模式完成的程度仍然不清楚,而且可能出人意料地稀疏。例如,工作记忆的“视觉空间画板”模型实际上在多大程度上涉及一种内部素描,甚至可能涉及绘画实际经验的内化[327]?
低维内部草图的间接证据可以在内部视觉感知模型和行为线条图之间观察到相似性的工作中找到[328]。作者指出,这些图像可以追溯到 4 万年前的旧石器时代猎人(可能起源更早),这表明线条画不仅代表了传达意义的有效手段,而且还可能揭示视觉系统的功能原理。虽然这项特殊研究的重点是预测腹侧流的反应,但后内侧皮层的神经活动模式可能对于与视觉意识具有很强的对应性特别重要(图 6)。也就是说,腹侧流的特征层次可能有助于协调后内侧皮质中不断演变的时空流形,作为有意识可访问的二维画板。一项研究为该模型提供了一些支持,其中注意力和工作记忆表明了视野的二维映射[329]。这种中线结构与其他感觉层次结构的上层之间的连接进一步允许(部分)填充多模式体感状态,因此不仅为笛卡尔剧院提供基础,而且为完全沉浸式虚拟现实提供基础[49]。更重要的是,这些不同的体验模式与海马-内嗅系统之间的联系可以让这种躯体模式完成根据物理和抽象空间的轨迹进化,从而为情景记忆、新颖的想象和规划提供基础(图3和图3)。4).就填充过程而言,意识的具体内容可能取决于各种感觉层次的表征能够在其时空尺度上与大规模亚稳态同步复合体耦合的具体程度。形成[73,74]。
虽然意识体验可能是“平坦的”[330],因为维度低得惊人,但意识在整个心理系统中的功能也可能是深刻的。降维处理的多重确定的上下文意义可能反映在几乎所有收敛于约 39 位/秒的公共信息传输速率的语言中 [331]。从理论上讲,意识处理的有限维度可能是造成这种交流瓶颈的主要原因。然而,意识的生成潜力和语言的表达能力(以其“有限手段的无限使用”)仍然可以提供超天文符号能力。即使综合动态核心和全局工作空间的能力极其有限,它们仍然可以提供超天文符号能力。通过跨越层次组织系统内部和之间的层次,拥有深度和强大的组合,从而构成多尺度的功能异构体。意识过程的时间延伸性质[332,333]为复杂的无意识动态的塑造提供了无数不同的机会,其中许多可以通过不同的——但能够在不同程度上整合——自我和世界建模来进行连贯的组织。在多个层面上,其丰富性通过上述方式的叙事组织而大大扩展[184]。
虽然意识的某些丰富性可能代表了一种“大幻觉”,但在许多方面,这种所谓的幻觉现象可能会通过根据需要填充细节来发挥作用,就好像一个丰富而完整的领域总是存在的。鉴于相关信息的可用性,除了拥有许多“值得想要的自由意志”[299]之外,我们还拥有许多值得想要的意识体验。如果我们不考虑意识作为生成过程的时间延伸展开的本质,意识只会显得“扁平”[73,74,334]。因此,丰富意识的虚幻本质本身可能是一种幻觉,因为试图从非时间的角度对本质上依赖于时间的过程进行建模,这表面上不足以评估相关现象。[注:自我的紧缩解释的紧缩可以以类似的方式得出,包括佛教/休谟主义将自我还原为非自我元素。]
5.2. Conscious and Unconscious Cores and Workspaces; Physical Substrates of Agency
尽管详细的处理超出了当前讨论的范围,但多种方法可能有助于估计对意识做出贡献的子网络(例如,巨型组件)[335-337],或许还有代理。一项有趣的研究使用 k 核分解来跟踪从有意识到无意识的潜意识状态的转变 [338]。令人惊讶的是,当大脑过渡到潜意识状态时,意识状态最紧密相连的内核和内核仍然保持功能活跃。不仅大脑最内部的连接核心内的活动可能是无意识的,而且由于外围外壳的失活而失去了有意识的访问,这可能表明感觉运动信息对于实现连贯体验的重要性。这些发现表明,可访问的意识可能不是在最内在的核心产生的,而是在层次组织和抽象的中间层次产生的[207,262],可能涉及上述关于元认知和自我意识的虚构的行动感知循环。
这些发现还可能阐明其他神秘现象,包括直觉认知[339]、“舌尖”效应,甚至自发性在代理中的作用[314,340]。直觉和半意识感知的某些方面可能对应于在(无意识)最内层核心和外壳中积累并绕过中间层的吸引子动力学。或者,根据上述“孤立的感受性”模型,信息可能能够驱动行动选择和来自支持(有意识体验的)体现模拟的网络的有意识想象——可能是从内核中出来的第一个外壳——但没有足够的鲁棒性 稳定地自省。
虽然代理通常可能为了可控性而依赖可预测性,但自我预测的限制可能会通过某些方式来增强整体控制:
• 避免在行动选择(广义上包括与注意力和工作记忆有关的心理活动)中过度利用(以牺牲探索为代价)。
• 产生新颖可能性的过程,作为因果推理和规划的反事实来源。
• 博弈论考虑因素,例如削弱竞争对手制定竞争策略的能力,甚至可能包括来自代理本身的“对抗性攻击”。
通过这些方式,有时有些矛盾的是,通过限制有意控制的范围,可以增强能动性。
与此相关的是,人工智能领域的有趣工作将额极建模为循环神经网络,其混沌分叉的能力能够实现灵活的动作选择和预测学习[341,342]。由于可重入连接的组合,循环计算存储库在信息密度方面具有很高的潜力,但更明显的分层架构具有离散组合性(因此提供精确控制)和模块化鲁棒性(因此提供可分离优化)的优点 。皮层系统可以通过将循环分叉连接放置在具有更多线性动力学的动作-感知循环层次结构的顶部来利用这两种能力[43](图6)。循环系统对自身施加递归因果影响的能力使它们成为对初始条件敏感的混沌系统。通过这些方式,皮质控制层次的上层区域可能被意识建模本质上无法访问的过程占据。值得注意的是,皮层的这些最深层部分在进化和发展方面也是最新的[179],并且具有许多我们通常与人格相关的属性[143],包括个性[343,344]、自发性和自主性[345]。
如果这些关于意识神经基础的模型是准确的,那么它们也可能有助于将代理似乎缺失的发现置于背景中。Libet 实验 [346] 提供了一个特别值得注意的非代理演示的例子,因为观察到决定移动的主观体验是在预测性神经活动之后出现的。尽管该范式存在潜在的局限性[299,347,348],但考虑到我们期望原因先于结果,那么有意识的心理状态如何可能是因果关系的问题就出现了。从理论上讲,关于在预测神经信号之后发生的行动决定的报告可以部分地通过准备运动活动和很大程度上无意识的内核之间的有效连接来解释。
如果行为可以由意识之外的过程“决定”,那么我们的自由感会是另一个宏大的幻想吗?也许在某些情况下,但可能通常不是关于“值得想要的各种自由意志”[299],因为很多有意义的执行控制并不涉及基于反复无常的突发奇想的电机部署事件的生成。这种自发行为可能主要受等级较低级别内的随机活动的控制,更接近主要模式,这些模式较少访问连接丰富的网络,而大规模(有意识地访问和可控)协调活动往往会集中在网络中[203]。大多数行为不会作为一次性事件发生,而是在涉及有意识想象和计划的背景下展开(表 1、图 2),这可以极大地驱动整体神经动力学。与之前讨论的意识的明显平坦性和自我的假定非实质性的情况类似,我们可能会发现自己基于无法捕捉相关现象的调查来否认“真实模式”[300]的存在。在某些意义上,我们可以将代理(和人格)等同于具有有意识和无意识组成部分的整体系统。这样的系统(和人)可能不会在任何特定时刻受到意识的强烈塑造,但随着时间的推移可能会被显着地有意识地塑造。代理可能就像指挥家和管弦乐队之间的关系,指挥家既不是万能的,也不是仅仅是附带现象。或者用大象和骑手的比喻:有骑手的大象和没有骑手的大象是非常不同的“野兽机器”[349]。
5.3. Readiness Potentials and the Willingness to Act
Libet 现象的替代解释可以在自由能原理和主动推理(FEP-AI)框架中找到[55],其中大脑被理解为对世界进行预测建模的控制论控制系统[59-61]。如前所述,在 FEP-AI 中,对分层预测处理 (HPP) 相关过程理论作为控制神经功能的统一原则的支持正在不断积累 [20,148,350]。在 HPP 中,所有大脑区域都会根据自下而上的输入生成自上而下的预测,其中信息只有在无法被预测性抑制时才会向上传递(作为预测误差)。对这种通用皮质算法的支持通过理论考虑(例如效率)得到证明,并且与整个皮质所反映的通用架构原则一致[18]。HPP 认为感知和行动本质上是相互关联的,并且本质上是相似的:感知通过更新内部模型来最小化预测误差,而行动通过更新世界状态以更好地匹配预测来实现这一目标。动作选择被理解为感知的(互补)逆:感知层次结构通过上升的预测误差进行更新,动作层次结构通过下降的预测进行更新[351]。选择特定的动作,因为来自较高区域的更复杂/抽象的预测会导致更细粒度的低级预测的级联,最终通过脊髓运动池和与骨骼肌相关的反射弧驱动运动[72]。
HPP(以及更广泛的 FEP-AI)可能代表神经科学的“罗塞塔石碑”[71],允许对以前模糊的现象进行新的解释,可能包括与看似自愿的运动决策相关的准备电位 (RP) 的性质 [352]。这种多级建模框架对于研究 RP 和相关波形的功能意义非常有价值 [353]。FEP-AI 会将这些缓慢构建的潜力理解为预测模型的证据积累,伴随着对本体感受姿势的隐式(有时是显式)贝叶斯信念的大规模更新中的非线性相变[73,74,106,334]。HPP 机制中,这些离散更新的预测在向下传递到皮质层次结构时将构成各种自我实现的预言,并具有足够的力量来驱动公开的行动。
我建议 RP(作为运动预测)是通过在额叶-顶叶动作导向的本体感觉图(图 6-8)中积累循环神经活动,与扣带回-岛叶显着性网络相结合,在达到临界阈值时释放行动模式,在生物物理上实现的。在控制中枢(例如,前补充运动区域)中被超越[354]。这种跨越可以理解为全球工作空间理论[73,74,227,334]所描述的“点火事件”,因此构成了意识进入因果流并导致行动的一种(多种)手段。这些活动非线性增加的时期也可能对应于以行动为导向的身体图拥有最高程度的综合信息的时期,其估计可能与测量的意志强度相关[73]。有意识的意图(作为联合的信念-欲望)将有助于通过上述各种情感驱动的心理模拟来增强活动[355,356](图5)。这种富有想象力的规划有助于 RP 的假设与观察到的多巴胺能放电模式一致,也与导致意志行动的方差减少(和更大幅度的波形)一致,表明基于价值的控制过程[357,358]。
从神经现象学角度来看(图 7 和图 8),行动之前的“冲动”感觉对应于额叶行动层次结构 [351]、后部身体空间可供性层次结构 [94] 和岛状结构之间的(非线性)正反馈相互作用。cingular(内感受接地)显着层次结构 [162](图 6)。这些感觉不仅仅是副现象,影响情感状态的注意力选择,从而调节这些控制层次之间的有效连接[154,160](图5)。意识流将通过反事实处理进一步促进行动选择(例如, 模拟运动)和由髋马系统实现的富有想象力的规划[139,214,216,359](图4),包括关于“类型1”计划或“类型2”反复无常的RP [360]。这些系统还有助于想象/预测更复杂(且可能有意义)决策的后果[348],这将涉及从“对比因果关系”角度通过特定行动实现更大的层次深度和多重可实现性[361]。在这些更高的抽象层次上,最大的解释力可以在更粗粒度的描述中找到,例如人格和自我意识[162,207,264,315],从而为代理提供进一步的神经计算基础。最后,上述“孤立的感受性”模型也可能与解释估计的“决策”时间和测量的 RP 之间的差距相关,因为反复无常的行动更有可能与难以连贯地接受的感受性状态相关联。内省的经验流,但仍然涉及与个人相关的价值观对动态的有意义的驱动。
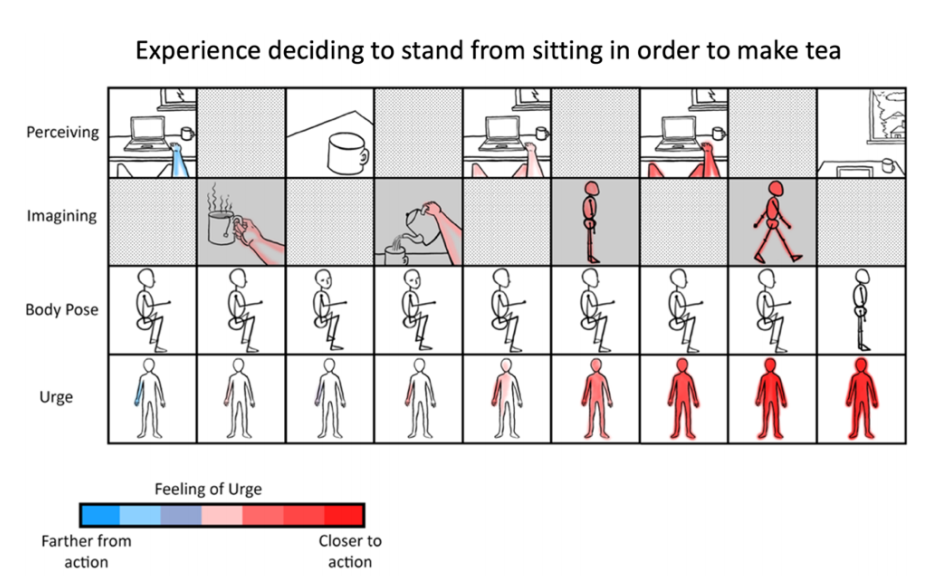
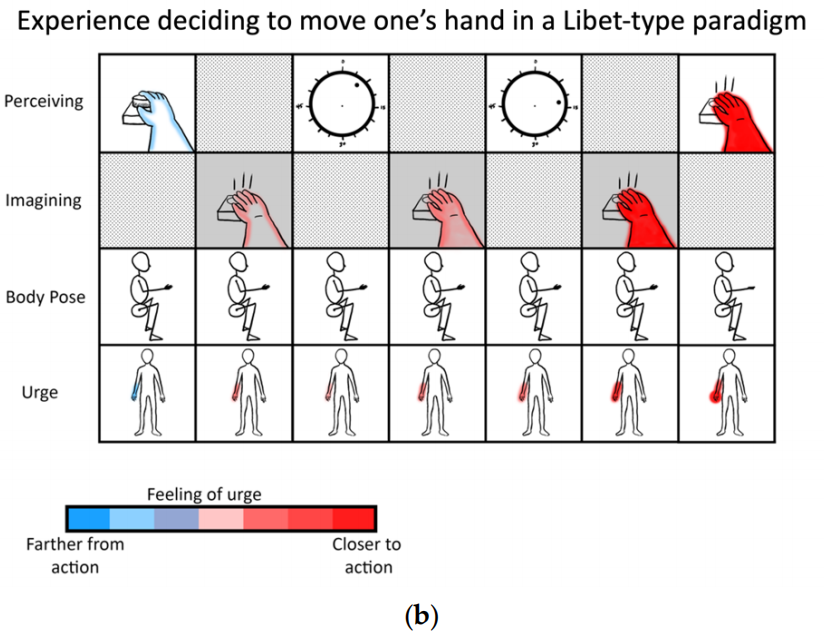
图 7. (a) 决定站起来泡茶的经历(参见表 1 和图 2、4 和 5)。个体在(1)感知拿着空杯子坐着,和(2)想象与实现获得茶的预期目标相关的动作之间交替。当个人想象(或排练)可能的行动时,冲动的感觉会在多模态的身体图上累积,并随着明显的站立动作而达到顶峰。(b) 在 Libet 范式中决定移动自己的手的经验。个人在(1)感知自己的手和时钟和(2)想象按下按钮之间交替。当想象/排练可能的动作时,“冲动”的感觉在多模态身体图上累积,这种感觉伴随着明显的按下按钮的动作而达到顶峰。
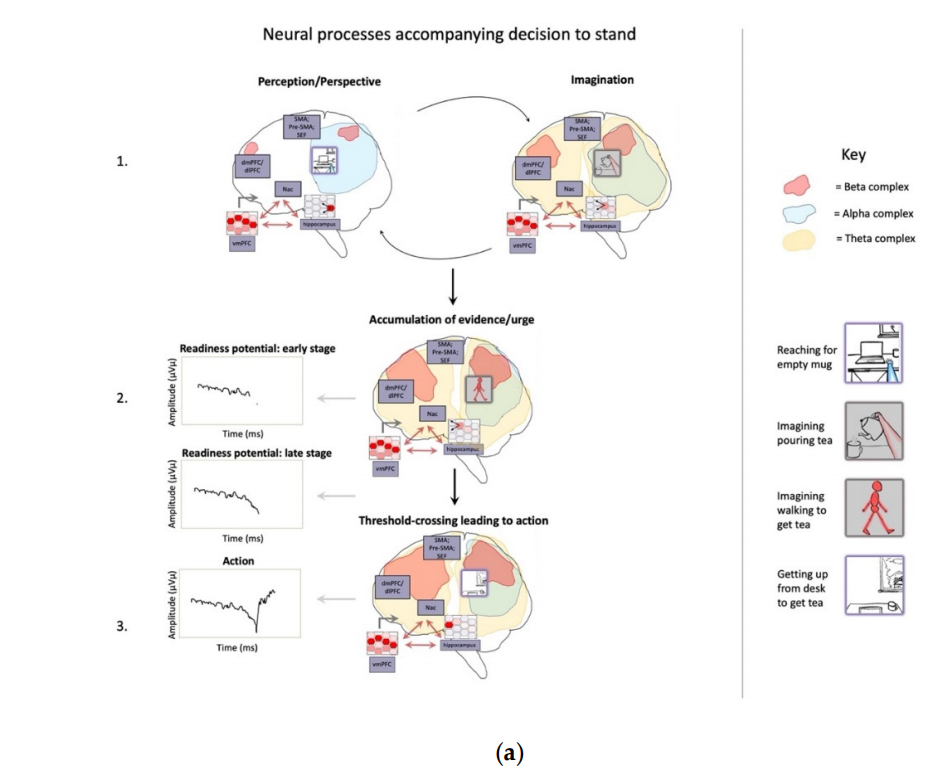
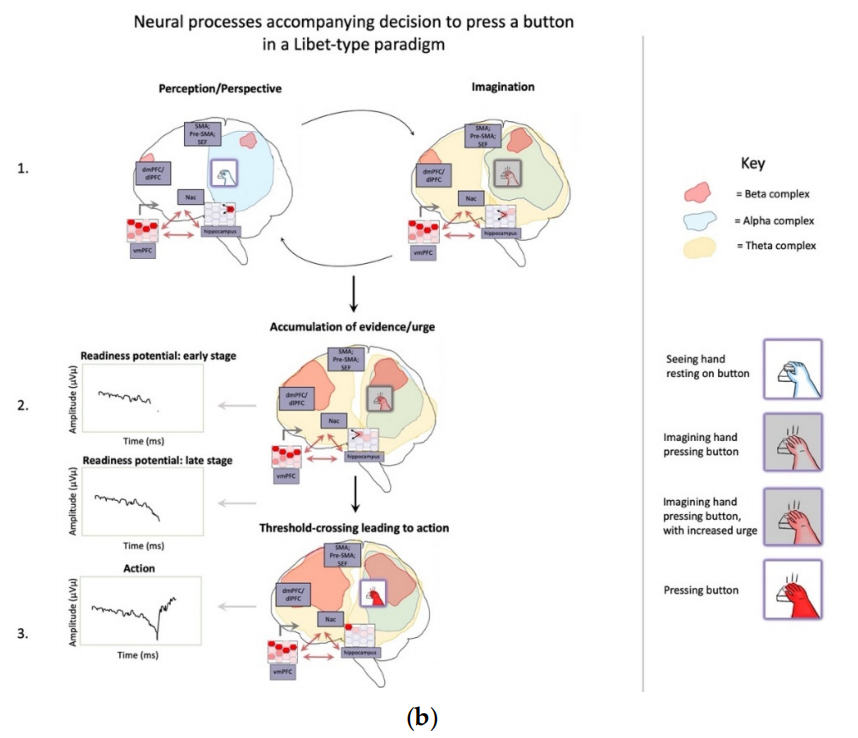
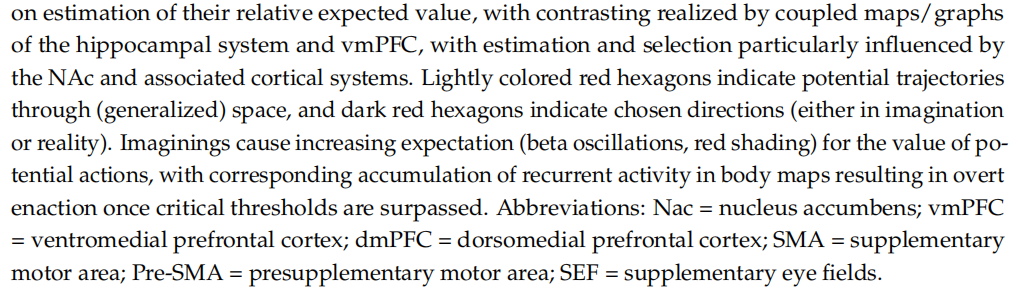
图 8. 准备潜力反映了模拟行动中冲动的积累。(a) 伴随决定站立的神经过程(见图 7a)。(b) Libet 型范式中伴随决定按下按钮的神经过程(见图 7b)。富有想象力的模拟(α 振荡、蓝色阴影)是通过 theta 振荡(黄色阴影)和跨频相控耦合嵌套伽马在海马体中精心编排的(图 4)。潜在的行动是根据选择的其相对预期值的估计,通过海马系统和 vmPFC 的耦合图/图实现对比,估计和选择特别受 NAc 和相关皮质系统的影响。浅红色六边形表示穿过(广义)空间的潜在轨迹,深红色六边形表示选定的方向(想象中或现实中)。想象会导致对潜在行动价值的期望不断增加(贝塔振荡、红色阴影),而身体图中的重复活动相应累积,一旦超过临界阈值,就会导致明显的行动。缩写:Nac = 伏隔核;vmPFC = 腹内侧前额皮质;dmPFC = 背内侧前额皮质;SMA = 辅助运动区;Pre-SMA = 前补充运动区;SEF = 补充视野。

5.4. Qualia Explained?
上面我们考虑了经验的典型定性方面,包括快乐、痛苦和欲望。这些“感受性”中的每一个在其特定特征、潜在机制和功能以及它们在不同背景下的变化方式方面都可以极其丰富。接下来,我采用神经现象学方法 [4,362-364] 开始探索如何使用 FEP-AI 的原理和机制来揭示我们存在的这些方面如何如此基本,但仍然如此神秘。
5.4.1. Emotions and Feelings
在试图分析情感体验的本质时,也许一些持续存在的谜团是由于术语上缺乏一致。达马西奥等人。[63,156,285,365],争论情绪可以归因于所有生物体的价值导向行为,包括细菌等单细胞生物体。然而,达马西奥保留了“感觉”这个词来表达情感的有意识的再现。相反,Feldman-Barrett 和 LeDoux [179,284] 反对这种更具包容性的情感概念化,认为情感语言应该保留用于通过解释过程表达和构建的有意识体验的情感状态。勒杜甚至声称情感只有在语言出现后才通过文化进化而产生。
两种观点都有明显的优点。虽然包容性较低的概念化可能会避免一些混乱,但它们也错过了识别价值和综合信息动态对所有生命至关重要的方式的机会[366,367]。我建议采取中间立场,将情绪和感觉视为在有机体模式的大规模变化中行动-感知循环的各自的行动和感知组成部分。相关的宏观动力学包括多种现象,从自主功能到肌肉骨骼修改[368],再到通过神经调节系统的神经系统改变以及来自具有高效中心性的神经区域(例如杏仁核复合体)的有效连接。除了将情绪作为一种行为、将感受作为一种感知的控制论表述之外,我们还可以添加一个额外的区别,即我们对表达的情绪和感知到的感受的意识程度。虽然可能违反直觉, 从这个更具包容性的角度来看,我们可能同时拥有有意识和无意识的情绪,以及有意识和无意识的感受。这种术语的使用将支持上述立场的许多基本原理,以及正常表达的许多民间直觉。语言的使用。如果对于沟通清晰度和道德考虑有用,则可以对意识是否涉及基本现象意识还是具有更复杂的访问或自主变化进行额外的区分。
LeDoux [179,369] 认为,没有复杂语言的动物不能说拥有情感,而只是在“生存回路”内具有功能活动。这些主张是通过语言为构建复杂的扩展自我模型提供必要的句法结构来证明的。或者正如勒杜所说:“没有自我,就没有恐惧。” 这种对自我对于意识体验的基本重要性的强调与这里和其他地方提出的观点在很大程度上是一致的[91]。如果没有扩展的自我过程,情绪和感受将与由存在的象征秩序所统治(并统治)的人类所构建的情绪和感受有质的不同。然而,在这种控制论的表述中,“生存回路”的功能活动可能有助于作为大规模有机模式的情绪的产生,但仍然没有被有意识地表达或感受到。
因此,所有进化的控制论系统都可以说具有情感和感觉,但只有能够进行连贯的综合世界建模的系统才会有意识地体验这些影响[73,74]。这些意识系统可能包括所有哺乳动物和鸟类,如果大脑皮层组织[370,371]足够复杂,可以用空间、时间和因果一致性来模拟系统世界状态,那么还可能包括爬行动物或鱼类。因此,我们可以在上述观点之间采取中间立场,将情绪和感觉视为生活中普遍存在的特征,同时认识到当这些现象与各种意识相关时出现的质的差异。更具包容性和更少包容性的概念立场都是合理的,但针对的是性质不同的情感现象。
5.4.2. What Is Value? Reward Prediction Errors and Self-Annihilating Free Energy Gradients
在 FEP-AI 中,所有生命系统都可以被描述为遵循自我模型证据最大化和预测误差最小化的单一目标[372]。在这个框架中,生物体通过隐式预测稳态(以及后来的生殖)预测错误的纠正来开始发育,从而形成所有后续模型生长的基础。随着经验的积累,这些建模工作逐渐应用于建模过程本身及其生成的经验,包括可能导致预测误差变化的模型。通过这种方式,我们可以预测自己,最大限度地减少预测错误并体验相关的心理状态,包括情绪和感受。通过这种来自早期有机体经历的记忆的联想链,生物体在不断尝试进行预测性稳态纠正(即动态平衡)时,生命开始受到强化/惩罚。然而,有机体逐渐学习感觉运动偶然事件,以使这些与奖励相关的刺激更加有效。/不太可能可用。从机制上讲,检测这些突发事件的表征本身与中脑价值信号相关——例如,眶额皮层:伏隔核壳:腹侧被盖区:多巴胺[110]——因此允许皮层模型驱动强化/惩罚并形成适应性的制定政策。
这个解释与元强化学习[342]的工作有相似之处,其中系统最初被赋予主要奖励函数,从中可以从经验中获得更强大的辅助奖励函数。从 FEP-AI 的角度来看,这些二次预测将构成关于预测误差最小化可能模式的高阶信念。根据候选跟踪模型[373],多巴胺很可能通过最活跃的阶段性增加来加强最有可能有助于其释放的任何预测,从而为信用分配问题提供部分解决方案。如果阶段性多巴胺的增加与预测误差校正的变化率成正比[76,374-377],那么越快地最小化预测误差,就越能被预测。
通过这些方式,有机体开始预测预测误差初始增加的状态,因此这些自由能梯度(体验为欲望或“想要”)可能会通过行动(体验为快乐或“喜欢”)被破坏[378,379] 。这些预期和完成奖励梯度的创建和破坏将刺激多巴胺释放,其释放量与自由能最小化的幅度成正比,以及预测误差减少的时间间隔[380]。这些经历反过来会更新信念和欲望,其反事实性质为激励未来的行为提供了更多的自由能源。这些机制将塑造生物体,使其不仅能够在稳态和生殖状态下预测自身,而且还能偏离这些理想的存在模式,达到目标与现实之间的这种差异预计是可以控制的程度。因此,通过经验,我们开始预测自己最初会遇到负价态,当我们通过想象或公开的行动消灭这些自由能梯度时,这些状态可能会变成正价态,从而建立新的目标/梯度来追求/摧毁未来。
5.4.3. Curiosity and Play/Joy
这种预测误差最小化的预测创建了一个有趣的设置,当生物体发现自己没有沿着足够陡峭的预测误差梯度下降时,它们最终会感到惊讶[76,374]。这正是进化所“想要的”[17,381],因为有机体在进化上的适应性是没有限制的,因此有机体应该始终寻找以新方式实现价值的机会。奖励预测错误驱动多巴胺释放可能提供一种实现这种在寻求价值实现机会时扩张的进化必要性的方法。如果强化和行为去抑制背后的机制只是为了获得意想不到的良好结果而被激活,那么有机体将总是发现自己在寻求探索它们所能达到的极限。如果伴随着完善模型和满足基于好奇心的欲望的机会,这种探索冲动将会更加强烈,从而实现除了效用最大化的外在价值之外的学习的内在价值[382-386]。
相比之下,无聊代表了一种惩罚过程,其作用与好奇心(和玩耍)相反。实现这种负激励的一种机制可以在习惯方面的预测编码中找到。如果有机体几乎完美地预测奖励,或者认为相关的刺激不值得关注,那么这种熟悉性将导致预测错误仅在较低级别的皮层层次结构中产生,而这些层次结构缺乏访问丰富连接的网络来实现意识意识。73]。预测错误未能达到更深层次将导致与这些潜在奖励相关的特征的识别度降低。就隐性预测和显性预期而言,与预期价值相比,先前未完全记录的奖励事件将令人失望[387,388],因此导致刺激贬值并降低选择相关政策的概率。几乎自相矛盾的是, 当有机体对奖励刺激变得不那么(愉快地)惊讶(或更熟悉)时,相对于预期的奖励而言,生物体最终会变得更加(不愉快地)惊讶,因为预测的奖励永远不会在经验中显现出来。这种模式的一些证据可以在过度排练的愉悦行为中找到,这些行为过于自动、习惯,并逐渐失去其享乐基调。在好奇心和无聊这对孪生大师之间,代理人被塑造为始终扩大其价值实现政策的范围,并持续增长,直到这些努力预计会带来越来越理想的结果[386]。
在 FEP-AI 下,我们应该期望生物体——凭借现有的成功——配备(或由)系统定义的先验期望(或偏好),在这些期望(或偏好)中,它们正在优化自己的模型,执行以下类型的操作:生存所需的东西,包括寻找信息。这些建模要求要求生物体根据对未来产生影响的政策制定系统世界配置,并且还依赖于尚未部署的政策[389]。这意味着成功持久的自适应系统不仅必须最小化自由能,而且还必须最小化(绝对是反事实的)未来的预期自由能。一个成功的主动推理代理将期望自己能够最大化信息增益(即精度加权的预测误差),同时避免控制论熵的积累[59-61,390,391]以应对系统的存在威胁。在 FEP-AI 中,这种平衡稳定性/可塑性权衡的困境是通过预期自由能的奇异目标函数上的梯度下降(有界最优)解决的。
在主体能够同时平衡最大化信息/探索的内在价值的必要性与实现首选世界状态的外在价值的情况下,将发现总体预期自由能的最大减少率。这种情况可以被称为游戏,或“游戏”[386,392,393]——可能主观上伴随着“流动”状态[394]——在最大化奖励的过程中,代表了生物体的吸引状态,将它们精确地放置在它们应该去的地方。是为了最大化学习和进化适应性[395]。平衡的游戏条件将智能体吸引到最近发展的区域[396]——或“相邻可能的边缘”[397,398],以及“混乱的边缘”[239]——其中学习率是最佳的,不会产生过度的学习率。也没有为促进日益熟练地参与世界提供挑战性的条件[399,400]。
这些考虑因素有助于解释为什么我们不希望智能体通过将自己隔离在低复杂性环境中来最大程度地减少意外。这是一个先验不可能的结果,因为这种情况会增加稳态调节核及其(动态)耦合系统的预测误差。此外,这样的代理人会感到无聊和缺乏好奇心和玩耍。尽管我们还应该记住,这种所谓的“暗室问题”[401]可能无法通过主动推理系统完全解决,因为人们经常寻求降低复杂性的环境,无论是由于与 焦虑和抑郁[363,402],或者陷入相对于模型优化探索的过度利用的局部最大值。
5.4.4. Synesthetic Affects
在上述描述中,所有情感最终都与稳态或生殖错误信号的纠正相关联,其中内感受后果可能是一些最可靠的信息来源[75]。然而,这些来自人体内部环境的信号的空间定位性和可控性较差。如果时空和因果情境化对于实现连贯的体验是必要的,那么这些对意义建构的限制可能会导致内感受信息被归因于非内感受来源。关于这些内脏(和重要)信号的最佳可用推论可能是,它们既是由与其相关的条件引起的,也是其不可分割的一部分。从理论上讲,这可能会导致大部分内感受具有准联觉质量,其中难以定位的信号与更容易建模的本体感受和外感受现象紧密纠缠(或“注入”)(图 5)。例如,我们可能既从内部感受到我们的身体,同时也将这些感觉投射到相关的物体上。
虽然将感觉描述为一种联觉似乎很奇怪,但由于涉及跨模态混合,所有感知都可能至少具有某种程度的联觉现象学[403-407]。类似(并且可能重叠)的现象包括“口腔转介”,其中主要嗅觉感知被映射到味觉[408]。理论上,联觉影响可能提供对转介疼痛现象的部分解释,其中对身体部位的损害被错误地归因 到另一个位置[152,409]。为了进一步推测,颜色感知的现象学可能经常以这种方式联觉,由于内感受交叉映射,诸如“红色的红色”之类的原型感受性具有其特定的“纹理”。
这种联觉影响假说可能会得到对快乐的描述的进一步支持,快乐是一种应用于享乐体验对象的“光泽”[378]。如果准确的话,这个模型还可以部分解释为什么情感体验在被报道时往往具有难以形容的品质。也就是说,影响可能在很大程度上依赖于难以明确建模的信息,而建模工作通常涉及一种异常推论,即个人感受不可避免地——而且本质上是[410]——引发它们的条件的一部分。
联觉效应不仅可以解释我们的感受“着色”世界的一些方式——无论是好的还是坏的——而且还可以解释关于动机和努力的意志现象学(图5-8)。在这种观点中,意愿的感觉对应于一种混合感知,其中内感受状态被映射到实现意图的效应器系统上。因此,除了帮助解释体验中其他神秘的方面之外,这些类似联觉的过程也会产生广泛的功能后果。也许最根本的是,这种联觉现象学可能有助于建立身体所有权感和最小(具体)自我意识,而心灵的大多数方面最终都依赖于这些自我意识。支持这些模型的一系列证据是使用增强现实的发现,其中叠加内感受心脏信号增强了对“橡胶手错觉”的敏感性[411]。有趣的是,这种异常推论也受到体验镜像触摸联觉和动觉镜像错觉的倾向的调节[197,412]。
已经提出了情绪主动推理的预测编码帐户,其中可以通过(a)改变自主条件或(b)通过本体感受效应器系统的动员改变相关的世界状态来最小化内感受状态的预测误差[75,413]。如果联觉现象学增加了内感受状态与行动和感知结果紧密结合的程度,那么这种结合将有助于在感知内容上建立可供性知情的显着性映射,从而促进行动选择和规划[414]。正如上面关于跨多模态身体图的自由能量流和准备电位的生成(图 5-8)所述,这些紧密的知觉耦合可以加强内感受和本体感受模式之间的有效连接模式。这种联系不仅仅是附带现象,而且可以从网络中获得更大的控制能量,这些网络的动态最终基于进化适应度和具有有机价值的经验历史。
情感现象的主观存在感[243]可能在很大程度上取决于情感和结果之间相对紧密的关联,因此有助于情感和推断原因之间的联觉映射。如果这些联系被断开——例如,由于对内感受的感觉不敏感或无法想象有价值目标的实现——内感受价值向其他感知的联觉注入就会受到损害。就规范功能的后果而言,切断与内感受的联觉桥梁可能涉及快感缺乏、述情障碍、精神分裂症的阴性症状,甚至科塔尔综合征和卡普格拉斯错觉等临床症状[154]。
5.4.5. The Computational Neurophenomenology of Desires/Pains as Free Energy Gradients That Become Pleasure through Self-Annihilation
多巴胺能神经调节通常被理解为指示欲望相关状态[415,416],并且在 FEP-AI 中也发挥着重要作用[417-419]。多巴胺调节与价值相关的刺激的表现活动,包括与实现有价值的目标相关的行动。虽然多巴胺能功能很复杂[420],但信号水平升高可以解释为表明有信心当前的政策/能力可能会实现关于感知或想象的刺激的期望结果。相关的刺激特征包括外部奖励线索以及涉及寻求有价值目标(包括避免不良结果)的活动的多模式表示。
在上述目标导向行为的预测处理中,当代理预测自己获得价值,但尚未实现这些期望的结果时,生成的预测误差对应于目标实现的表示之间的差异,相对于估计的当前或想象的可能状态 。这些差异被认为源自期望状态和估计可能状态的迭代对比,发生在海马-前额叶耦合协调的 theta 频率上 [139,142](图 4)。随着这些比较操作的进行,不一致的特征会产生更多的活动作为预测错误,因此引起人们的注意,并用需要通过更新内部模型或改变世界来处理的最重要的特征播种想象力[105]。
欲望的大部分现象学可能代表对价值实现的预测,激活相关的躯体和内感受伴随物,这些伴随物在与价值实现最相关的身体地图中主观地(和联觉地)感受到(图5)。如果这些感觉伴随着预测稳态或生殖价值实现的暂时净减少[76,374]——可能由阿片类信号传导[379,421]——总体上不愉快的内感受推理可能伴随这些感知。这样,欲望的感觉就会被体验为一种痛苦,其特定的特征取决于独特的学习历史。然而,如果我们发现自己预测价值的整体增加,那么痛苦的欲望就可以转化为愉快的期待,从而与想要的不适产生令人愉快的对比。如果情感体验的本能伴随物以准联觉的方式与外感受和本体感受纠缠在一起 如上所述,当内感受模式以基于历史关联的特定方式融入其他模式时,就会产生快乐和痛苦(包括欲望)。
用音乐比喻来说,在痛苦和未满足的欲望的经历中,整体旋律以更小调或熵[390,391]键/音色演奏。或者,在愉悦和满足欲望的体验中——可能包括虚拟的满足(即愉快的期待)——情感管弦乐队会演奏出更加和谐的旋律。人们可以将(完全身临其境的虚拟现实)体验电影的配乐视为独立的信息流,有助于将故事展开的“屏幕”上所看到的内容置于上下文中(图 6)。然而,更接近于经验的说法是,这种隐喻性的音乐进入了我们所看到和感受到的东西,赋予它(或联觉地着色)意义。事实上,我们也许能够发现情感现象的大部分原则在我们的音乐体验中得到了很好的体现[16,385,422],我们在音乐中构建和释放张力,享受或多或少辅音(或 越来越不和谐)的旋律。在音乐乐趣中,我们探索和谐与不和谐的对比,最终期望回到主音的完整性,但凭借我们的“体验自我”[423-425]的能力,找到当下的满足感并不一定是原因 我们的“记忆自我”发现自己被特定的歌曲所吸引。
神经管弦乐队演奏的情感旋律将由内感受模式主导,这是最古老的——从发育和进化角度来说——以及稳态和生殖潜力的可靠指标[63,130,285,426,427]。我们的心律是否放松且充满活力?我们的呼吸是轻松的还是强迫的?我们是否感到温暖(但不太热)或寒冷?我们的肠道是否受到刺激或过敏?我们内心感到充实还是空虚?我们是否觉得我们的身体完整而强壮,如果我们愿意的话,我们可以随心所欲地指挥?或者我们感到受损和软弱吗?这种内感受信息讲述了生命的基础和人们可以从中成长的价值核心。
5.4.6. Desiring to Desire; Transforming Pain into Pleasure, and Back Again
鉴于我们经常渴望欲望这一事实,我们如何才能将欲望体验调和为一种痛苦?虽然欲望有时可能是令人向往的,但处于饥饿或口渴未得到满足的状态而不相信这种情况是可以控制的,这并不是一件令人愉快的事情。不停地饥饿或口渴预示着体内平衡和生存的偏离。除非有机体能够确信它最终会纠正这种情况,否则无法满足这种愿望将表明系统面临生存威胁。因此,我们期望未满足的欲望会被体验为一种痛苦。然而,欲望的痛苦可以通过圆满或对成就的生动想象转化为快乐,并再次转化为快乐(等等)。
代理人能否在快乐与痛苦之间来回走动,要么尊重其体验或记忆自我[424]?如果所有的快乐最终都会因它们的消失而转化为各种痛苦,那么如何保持动力呢?除了导致多巴胺同时释放的阿片类信号传导等低水平机制之外[421],在预测编码机制中可能会发现愉悦和痛苦体验之间的额外不对称性。也就是说,更多变化的模式将更有可能违反预期(由于难以精确追踪),因此体验/记忆可能会被快乐和痛苦之间的过渡所主导,特别是如果伴随着突然或间断的改变 [76,248,374,380,428]。如果寻求而不发现会导致欲望相对渐进的积累,并且如果圆满往往会更快地纠正情况,那么成功制定的目标的经验和记忆将具有总体上令人愉悦(和强化)的品质。此外,由于很大程度上是由代理人自己的(可能是有意的)行为产生的,完成行为的更大可预测性可能允许注意力资源以允许更广泛的有意识地处理愉快体验的方式进行整理。最后,关于痛苦和快乐的一些对称性破坏可能来自上述注意力的运动性质,因为关注快乐体验的体验更有可能在(延长的)时刻以及跨时间得到加强 。[注:自上而下注意力的调节也表明,一些准心理动力学现象被认为是学习法则几乎不可避免的结果。]然而,这种快乐并不是自然选择“希望”我们得到的东西。拥有并坚持下去,但要不断地“寻求”[392],从而最大限度地提高适应性。
5.4.7. Why Conscious Feelings?
有意识地体验到的感受可能为协调全球有机状态提供统一的吸引子[130,285]。虽然情绪塑造可能在无意识的情况下发生,但当这些影响整合到连贯的经验领域时,可能更有可能影响整个系统。即使这些感觉采取“孤立的感受性”的形式而没有意识访问(如上所述),这些自我稳定的核心仍然可以提供大大提高的控制能量的来源。然而,当有意识地以基于有机价值的方式进行规划和持续调整行动时,这种牵引力将会更大。这种将享乐状态映射到有意识地反思的行动模型上,还通过将经验和记忆中的价值和行动结合起来,提供了处理信用分配问题的部分方法。如果情感发生在“黑暗中”而没有任何感觉,那么它们将无法强烈影响事件,也无法连贯地整合到明确的建模和规划中,包括涉及追求这些情感本身的目标的计划,例如 游戏和艺术领域。
5.5. Facing up to the Meta-Problem of Consciousness
意识的难题问的是,怎么可能有“某种东西
就像“成为一个物理系统[429,430]?意识的“元问题”是指解决为什么观点和直觉在能够有意义地回答这个问题方面存在很大差异的挑战(可能更容易处理)[431]。正如其他地方所建议的[73],元问题的一个潜在解决方案可能源于桥接原理的不可用,这将导致解释意识的前景看起来要么不可能(甚至在原则上),要么只是(极其)困难。元问题的另一个解决方案可以在对各种感受性的解释的本质中找到:虽然经过考虑可能是直观的,但乍一看,上面提出的一些模型似乎直接与经验相矛盾,例如构成一种痛苦的欲望, 反之亦然[152]。对经验方面的其他解释可能不一定与直觉相矛盾,但仍然可能看起来不可简化的奇怪,因此表面上令人难以置信,例如上面描述的联觉效应模型。然而,如果确实是经验的一些最基本、最熟悉的方面在仔细观察时难以识别,那么这本身就是需要解释的事情。
如果这些经验方面可能变得“现象透明”[49,432],并因此抵制内省,那么最基本和最熟悉的事物的不可识别性的看似悖论大部分都可以得到解决。在神经计算上,任何给定时刻的感知内容可能都是由具有特定整合区域的同步β复合体所蕴含的[73,74],但这些局部推论需要进一步整合到更大的(α和θ同步)复合体中以实现现象和 访问意识。如果预测编码机制如此成功,以至于它们能够在有意识地注册之前“解释掉”经验的各个方面,那么这种更广泛的整合可能最终不会发生。也就是说,迭代贝叶斯模型选择在分层深度的多个(可能嵌套)级别上展开,因此,如果通过更接近模态的较小贝叶斯复合体很大程度上成功地解释了观察结果,则该信息永远不会到达更丰富连接的核心/子网络,从而实现一致 世界建模和经验感知。或者,这些信息可能会产生“孤立的感受性”形式的体验,但由于这些感受性状态的短暂性而无法实现有意识的可访问性。通过这些方式,那些最基本和最熟悉的东西几乎不可避免地变得几乎无法内省。
元问题在概念上可能与困难问题本身一样丰富。进一步有希望的方法可能涉及来自功能性“奇怪循环”和自引用的悖论[433]、递归的计算限制[434],以及源自建立自我中心视角的机制的看似悖论[181]。最后,一些解决方案本质上可能是社会学的,可能反映了心理科学中“物理学嫉妒”的遗产[435]。我们不仅缺乏对作为自我和经验核心的体现的衔接原则和理解,而且在内省主义衰落和行为主义兴起之后,科学实践既含蓄又明确地贬低了主观性。鉴于主观性的这一禁忌——即我们希望就意识来解释的东西——如果我们对经验的本质缺乏令人满意的理解,我们为什么会感到惊讶呢?最后,一些(困难)问题可能源自认知科学的框架,这些框架使所有笛卡尔的心理功能框架成为禁忌。也就是说,如果准笛卡尔直觉实际上是心智和大脑本质的半忠实表示,那么如果我们的学术研究及其对民间心理学的诋毁[436]未能提供令人满意的解释,我们为什么要感到惊讶呢?我们的意识机构的本质是什么?
6. Conclusions
“所有这些关于信号和命令的讨论的意向性提醒我们,理性被视为理所当然,并以这种方式向我们展示了理论的不完整之处。这是在我看来,这一特征对设计意向性的严格定义这一尚未完成的任务给予了重视,因为如果我们能够声称意向性话语的纯粹形式标准,我们将拥有相当于交换媒介的东西。评估行为理论。意向性从情报借用的各种形式(例如,信号阅读器、意志发射器、记忆走廊中的图书管理员、自我和超我)中抽象出来,并作为准确检测理论位置的可靠手段。相对于解释情报的任务处于红色;每当一个理论依赖于带有意向性逻辑标记的表述时,那里就隐藏着一个小人物。”
——丹尼尔·丹尼特 [1]
这些探索试图偿还尽可能多的“情报贷款”通过为意向性创造一个具体的支持,从而为理解认知提供一种共同的货币。我认为,意识是由动态预测核心产生的,以体现的自我模型为中心,充当嵌入环境中寻求有价值目标的代理的控制论控制器。为了实现这些价值,智能体进行富有想象力的规划,将期望结果的推论链接回当前估计的状态,并通过多级面向行动的身体地图实现行动。对于这些准侏儒来说,意向控制是由信念和欲望驱动的,被理解为自由能梯度,当通过巧妙的行动将预测误差最小化时,自由能梯度就会消失,从而建立未来追求的新目标。通过各种模拟行动, 具身自我模型既影响内感受和外感受推理层次的高级表征,也受其影响,因此为各种形式的意识访问、元认知和自我知识提供了基础。这种深刻体现的架构为认知科学中讨论的大多数心理操作提供了活跃的基础,包括有意识的心理状态可以因果影响注意力、工作记忆、想象力和行动的方式。通过这些方式以及更多方式,理解有意识思维的根本体现基础 可能会证实许多民间心理和传统的自我概念,包括多重性和统一性,以及由约束和自由定义的意志。