【深度学习】强化学习(二)马尔可夫决策过程


一、强化学习问题
强化学习的基本任务是通过智能体与环境的交互学习一个策略,使得智能体能够在不同的状态下做出最优的动作,以最大化累积奖励。这种学习过程涉及到智能体根据当前状态选择动作,环境根据智能体的动作转移状态,并提供即时奖励的循环过程。
1、交互的对象
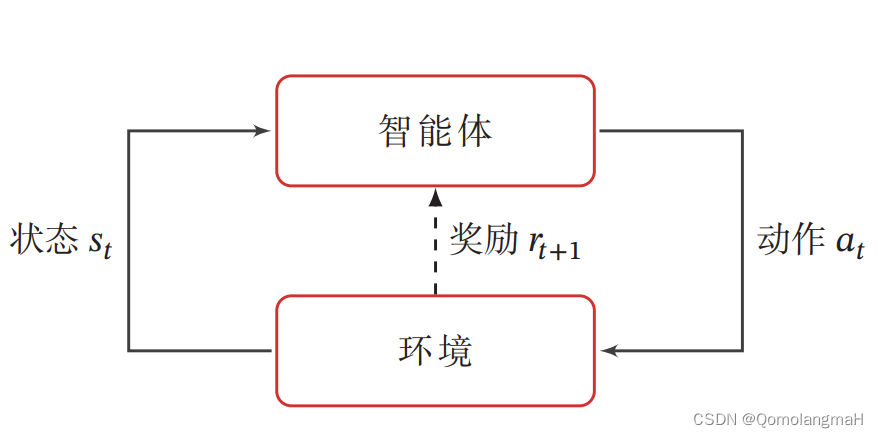
在强化学习中,有两个可以进行交互的对象:智能体和环境
- 智能体(Agent):能感知外部环境的状态(State)和获得的奖励(Reward),并做出决策(Action)。智能体的决策和学习功能使其能够根据状态选择不同的动作,学习通过获得的奖励来调整策略。
- 环境(Environment):是智能体外部的所有事物,对智能体的动作做出响应,改变状态,并反馈相应的奖励。
2、强化学习的基本要素
强化学习涉及到智能体与环境的交互,其基本要素包括状态、动作、策略、状态转移概率和即时奖励。
- 状态(State):对环境的描述,可能是离散或连续的。
- 动作(Action):智能体的行为,也可以是离散或连续的。
- 策略(Policy):智能体根据当前状态选择动作的概率分布。
- 状态转移概率(State Transition Probability):在给定状态和动作的情况下,环境转移到下一个状态的概率。
- 即时奖励(Immediate Reward):智能体在执行动作后,环境反馈的奖励。
3、策略(Policy)
策略(Policy)就是智能体如何根据环境状态 𝑠 来决定下一步的动作 𝑎(智能体在特定状态下选择动作的规则或分布)。
- 确定性策略(Deterministic Policy) 直接指定智能体应该采取的具体动作
- 随机性策略(Stochastic Policy) 则考虑了动作的概率分布,增加了对不同动作的探索。
上述概念可详细参照:【深度学习】强化学习(一)强化学习定义
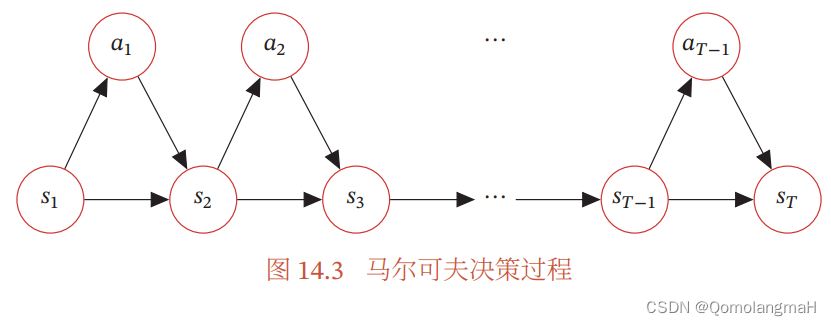
4、马尔可夫决策过程
为了简化描述,将智能体与环境的交互看作离散的时间序列。智能体从感知到的初始环境
开始,然后决定做一个相应的动作
,环境相应地发生改变到新的状态
,并反馈给智能体一个即时奖励
,然后智能体又根据状态
做一个动作
,环境相应改变为
,并反馈奖励
。这样的交互可以一直进行下去:
其中
是第
时刻的即时奖励。这个交互过程可以被视为一个马尔可夫决策过程(Markov Decision Process,MDP)。
1. 基本元素
- 状态(
):
- 表示智能体与环境交互中的当前情况或环境状态。
- 在时间步𝑡时,智能体和环境的状态为
。
- 动作 (
):
- 表示智能体在给定状态
下采取的动作。
- 在时间步𝑡时,智能体选择执行动作
。
- 奖励 (
):
- 表示在智能体采取动作
后,环境反馈给智能体的即时奖励。
- 在时间步𝑡时,智能体获得奖励
。
2. 交互过程的表示
- 智能体与环境的交互过程可以用离散时间序列表示:
- 在每个时间步,智能体根据当前状态选择一个动作,环境根据智能体的动作和当前状态发生转移,并反馈即时奖励。
- 这种时间序列描述强调了智能体和环境之间的交互,以及在时间步𝑡时智能体和环境的状态、动作和奖励。这符合马尔可夫决策过程的基本定义,其中马尔可夫性质要求当前状态包含了所有与未来预测相关的信息。
3. 马尔可夫过程(Markov Process)
- 定义: 马尔可夫过程是一组具有马尔可夫性质的随机变量序列
,其中
是状态空间。
- 马尔可夫性质: 当前状态
对未来的预测只依赖于当前状态,而不依赖于过去的状态序列(
),即
- 状态转移概率
: 表示在给定当前状态
的条件下,下一个时刻的状态为
的概率,满足
4. 马尔可夫决策过程(MDP)
- 加入动作: MDP 在马尔可夫过程的基础上引入了动作变量
,表示智能体在状态
时选择的动作。
- 状态转移概率的扩展: 在MDP中,下一个时刻的状态
不仅依赖于当前状态
,还依赖于智能体选择的动作
:
- 马尔可夫决策过程的特点: 在MDP中,智能体的决策不仅受当前状态的影响,还受到智能体选择的动作的影响,从而更加适应需要制定决策的场景。
5. 轨迹的概率计算
- 轨迹表示: 给定策略
,MDP的一个轨迹
表示智能体与环境交互的一系列状态、动作和奖励的序列:
- 概率计算公式:
- 轨迹的联合概率:
- 通过对轨迹中每个时刻的概率连乘,得到整个轨迹的联合概率。
6. 给西瓜浇水问题的马尔可夫决策过程
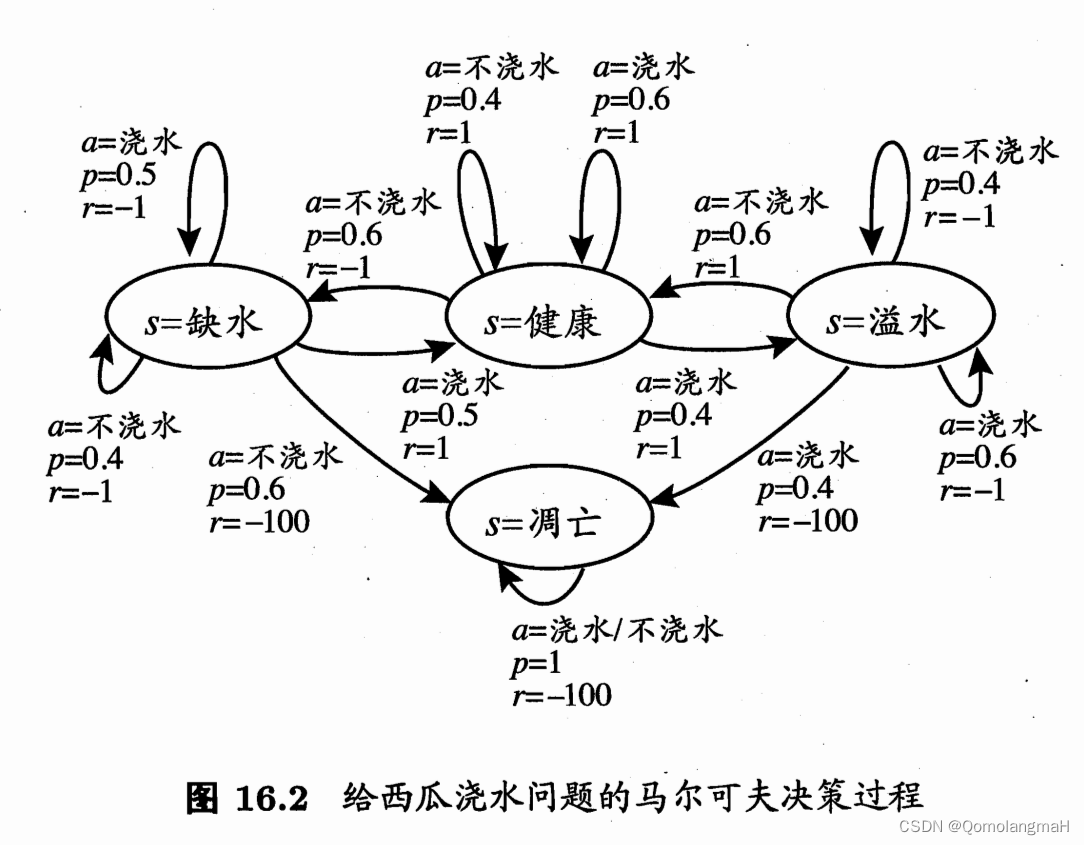
在给西瓜浇水的马尔可夫决策过程中,只有四个状态(健康、缺水、溢水、凋亡)和两个动作(浇水、不浇水),在每一 步转移后,若状态是保持瓜苗健康则获得奖赏1 ,瓜苗缺水或溢水奖赏为- 1 , 这时通过浇水或不浇水可以恢复健康状态,当瓜苗凋亡时奖赏是最小值-100 且无法恢复。图中箭头表示状态转移,箭头旁的
分别表示导致状态转移的动作、转移概率以及返回的奖赏.容易看出,最优策略在“健康”状态选择动作 “浇水”、在 “溢水”状态选择动作“不浇水”、在 “缺水”状态选择动作 “浇水”、在 “凋亡”状态可选择任意动作。
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2024-01-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号