不是,哥!这是铷原子钟吗?(AR36CPT)

如果说在模拟电路里面运放是基石,那我觉得在数字电路里面的时钟就跳动的心脏,然后合理外推,时钟就是心脏(我这学是不是白上了?)
今天介绍一个有趣的小玩意儿,是一个外国公司:

应该有知道的朋友
应该有知道的朋友
我小张写肯定是有点子特点的:
是铷原子钟
是铷原子钟
等等!看看里面啥样的!

铷泡,玻璃泡内封装着微量的金属铷元素
铷泡,玻璃泡内封装着微量的金属铷元素
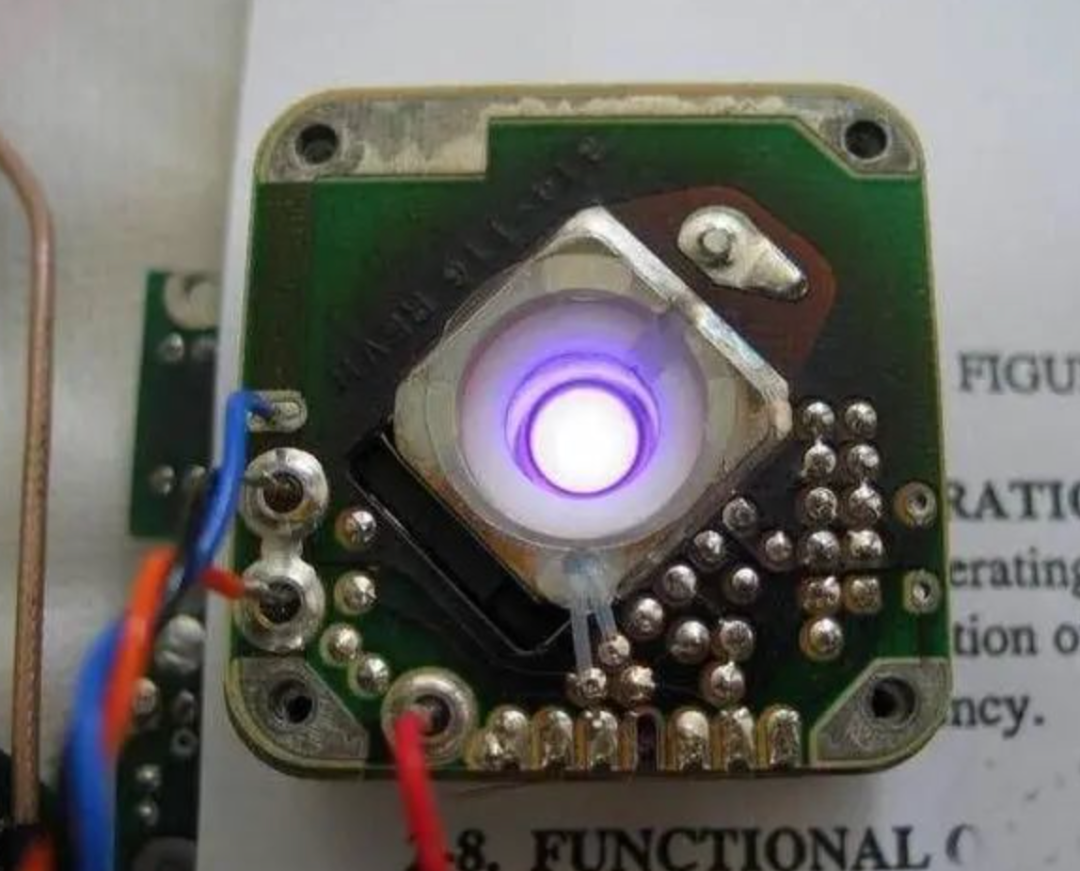
美丽的原子光,工作状态是模块通过高频电场加热金属铷,使之等离子化发出美丽的紫色光芒。
美丽的原子光,工作状态是模块通过高频电场加热金属铷,使之等离子化发出美丽的紫色光芒。
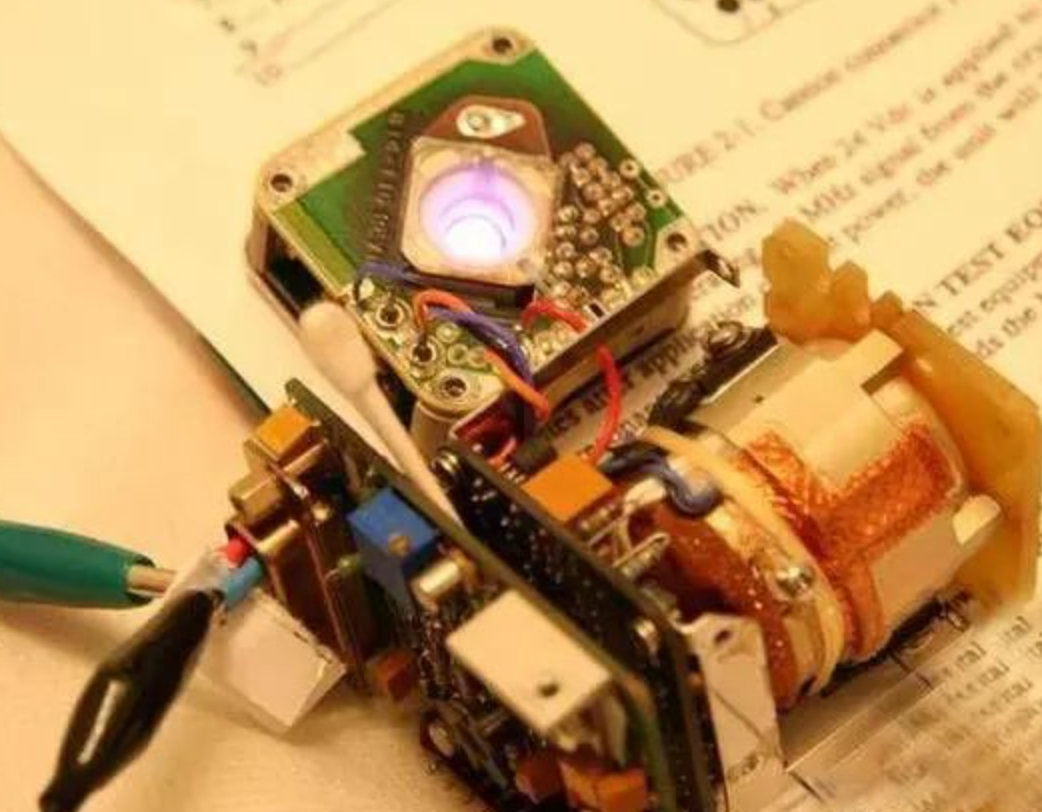
好看的呀!
好看的呀!
“原子钟级”不是一个严格的国际标准术语,更像工程圈的等级形容;它通常指:
这类频率/时间基准的“根”来自原子能级跃迁的固有频率(最常见是铷 Rb、铯 Cs),因而在长期准确度、长期稳定度、老化这些维度上,明显高于石英类基准(TCXO/OCXO)。
可以把它理解成“频率基准的最高一档之一”。
用一个“等级梯队”直观理解
(从常见到高阶)
XO(普通晶振):便宜、漂得也快,温漂/老化一般。
TCXO(温补晶振):把温漂压下去一些,适合一般通信/消费级设备。
OCXO(恒温晶振):通过恒温箱把短稳和温漂做得很漂亮,但长期准确度/长期漂移仍受石英老化影响。
Rubidium/CS 原子钟(含 CPT 铷钟模块):长期准确度/长期稳定度/老化通常显著更强,用于基站、授时、测试计量、精密同步系统。
“原子钟级”具体在说哪些指标更强?
在系统设计里最能感受到的是:
初始精度更高,出厂就很准,不需要自己花很大力气校准。
长期稳定度更好,例如以天/月为尺度的漂移更小。
老化更低,石英会“慢慢变”,原子基准更“靠物理常数站住”。
放回这个主角:AR36CPT 语境
像这种 CPT 铷原子钟振荡器,“原子钟级”基本就是在强调:它不是普通石英 10MHz,而是用铷原子物理特性做基准的 10MHz 参考源,还能用 1PPS 做驯服/锁定,把时间准确度进一步映射到频率。
看看主角
其实这个东西没有什么具体的设计给你,就是一些参数,然后可以输出时钟,串口配置。
有点不高兴
有点不高兴
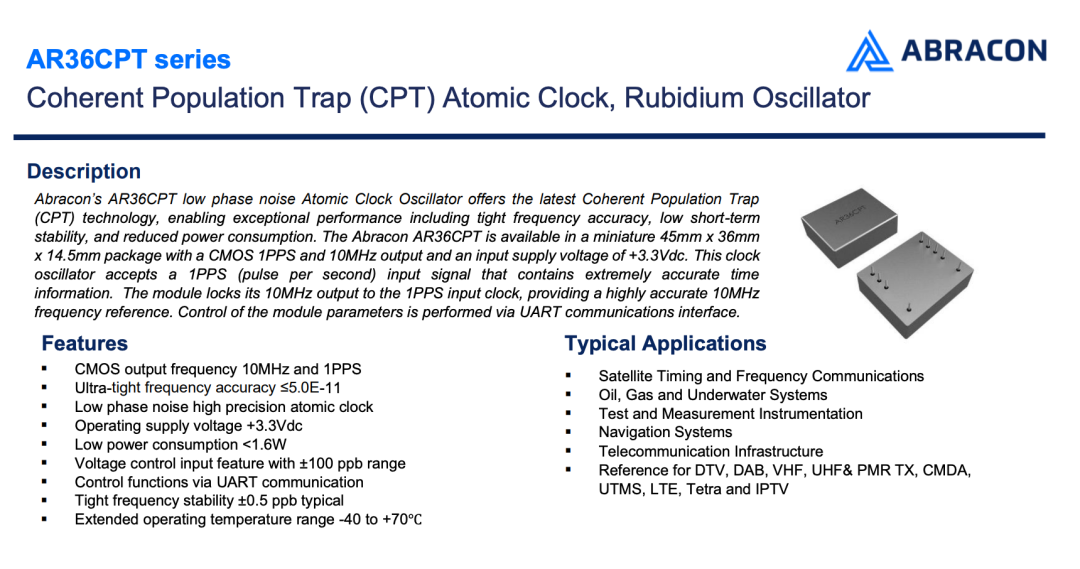
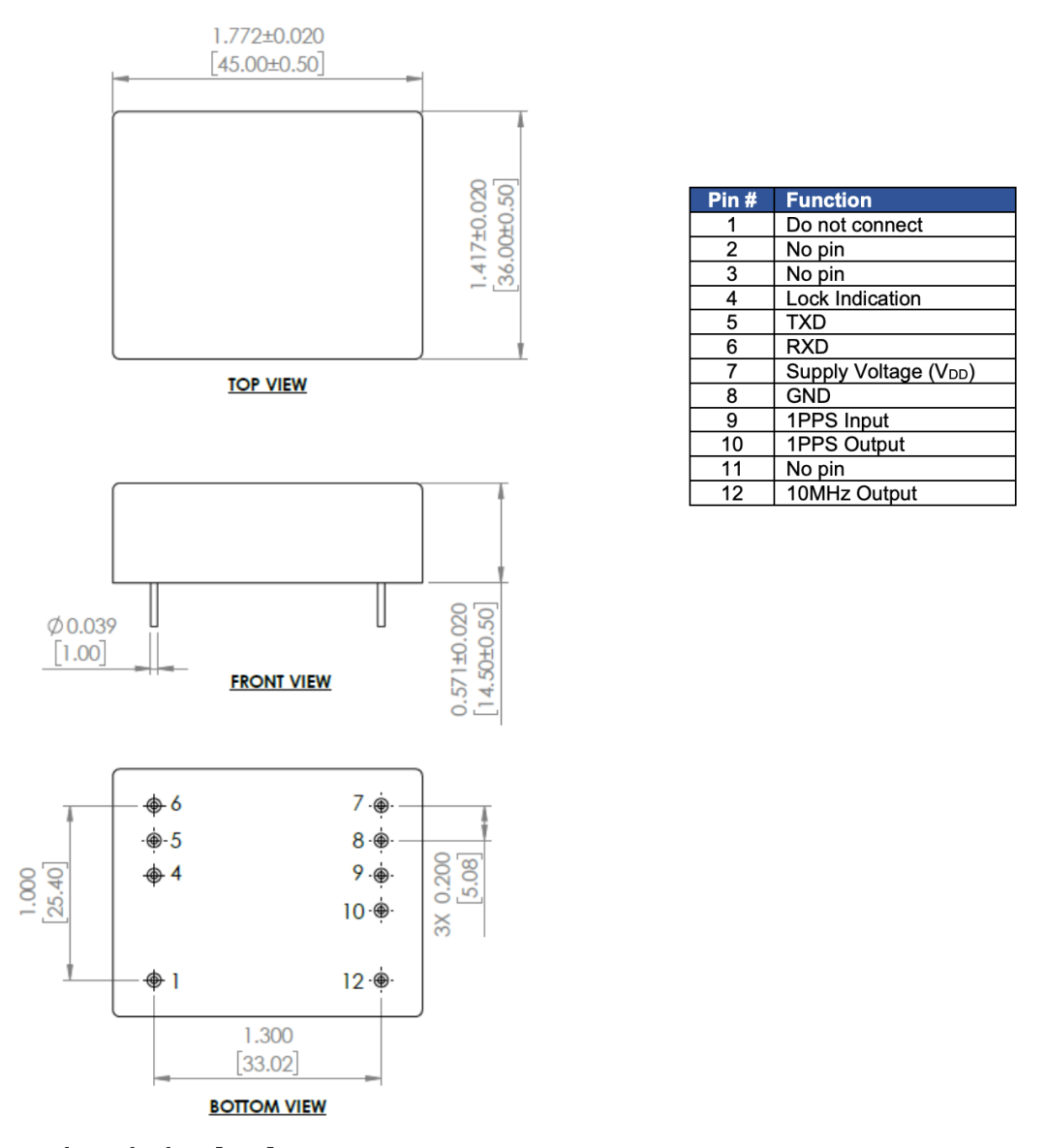
这是 Abracon AR36CPT 系列 CPT(Coherent Population Trap)铷原子钟/原子钟振荡器 的简要规格页(初版,2025-03-20 发布)。
它的核心定位可以一句话概括:用 CPT 铷原子钟提供一个非常高精度、低相噪的 10MHz 频率基准,并可用 1PPS 进行驯服/锁定,也能用 UART 做配置与状态管理。
这个模块到底能做什么?
输出:
10 MHz CMOS(Pin 12)
1PPS CMOS(Pin 10)
输入:
1PPS 输入(Pin 9)
文档写得很清楚:模块可以把自身的 10MHz 输出锁到外部极高精度的 1PPS 上,从而把“时间准确度”转成“频率准确度”。这在卫星授时、通信基站、测试计量等场景非常常见。
电气与时序关键参数
10MHz 输出(Pin 12)
频率:10 MHz
逻辑:CMOS
负载:15 pF
上/下电平:VOH 2.4 V,VOL 0.4 V
上升/下降时间:典型 6 ns(10%~90%)
占空比:45%~55%这些说明它是“数字 CMOS 方波参考”,不是正弦 RF 参考。若后级要喂 PLL/时钟芯片,一般没问题;若要做超低抖动模拟正弦基准,可能需要整形/缓冲/滤波链路。
1PPS 输入/输出
频率:1 Hz
脉宽:1 ms
同步指标:Input Sync ±50 ns(文档列在 1PPS Input 处)这表示它对外部 1PPS 的“对齐能力/锁定误差量级”在几十 ns 这个尺度。
精度、稳定度、老化、相噪
这部分是它的价值核心。
出厂初始频率容差
±5.0E-11 @ 25°C:这已经是“原子钟级”的出厂精度表达。
温度范围与频稳
工作温度:-40 ~ +70°C
频率稳定度(表格给的范围表达): 典型 ±5E-10,最大到 ±1E-9 量级(-40~+70°C)
料号命名中还写了: A: ±1 ppb over -40°C~+70°C(1 ppb = 1E-9)这和上面的表述一致。
Allan Deviation(短稳能力)
文档给了几个典型点:
2.0E-10 @ τ=1s
7.0E-11 @ τ=10s
2.0E-11 @ τ=100s
7.0E-11 @ τ=1000s这说明它在 1~100 秒这个区间的短期稳定性非常强,适合做“短稳+低相噪”的系统参考。
老化(Aging)
典型 4.1E-12 / day
最大 5.0E-12 / day(25°C,30 天后)这个老化水平对长期频率漂移控制很有帮助。
新知识:阿伦方差
Allan 指标一般指 Allan deviation(阿伦偏差,ADEV),是评价频率源/时钟稳定度最常用的指标之一,特别适合看“不同平均时间 τ 下的稳定性”,比单纯用“ppm/ppb”更能反映真实的短稳/中稳/长稳行为。
它在测什么?
把振荡器的瞬时频率偏差写成分数形式:
把时间切成长度为 的小段,对每段求平均:
Allan 方差定义为相邻两段平均频偏之差的平方的均值:
Allan 偏差就是开方:
直观含义:“当我用长度为 的时间去平均/观察这个频率源时,它的相对频率稳定度有多好?”
怎么读 Allan 曲线?
通常是 对 的对数坐标曲线。
小 :看短期稳定度(秒级、十秒级)
中 :看中期稳定度
大 :看长期漂移/老化/环境影响
曲线常见形状:先下降 → 到谷底 → 再上升
下降段:平均时间变长,随机噪声被平均掉
上升段:漂移、温漂、老化开始主导
不同噪声在 Allan 图上的“斜率指纹”
在 log-log 图上,不同噪声对应典型斜率:
白相位噪声(White PM):
闪烁相位噪声(Flicker PM): 附近(更平)
白频率噪声(White FM):
闪烁频率噪声(Flicker FM):(平台)
随机游走频率(Random Walk FM):
看到哪一段像哪种斜率,就能判断谁在主导。
为什么工程上爱用它?
因为它能一张图回答这些“关键问题”:
这个时钟最稳的平均时间是多少?直接看 “Allan 谷底”在哪个 。
我的系统该用多长的平均/锁相时间常数?做 PLL/GPSDO/1PPS 驯服时,这个非常重要。
短稳 vs 长稳取舍怎么评估?OCXO 往往短稳很好、长稳受老化影响;铷钟/原子钟长稳更强。
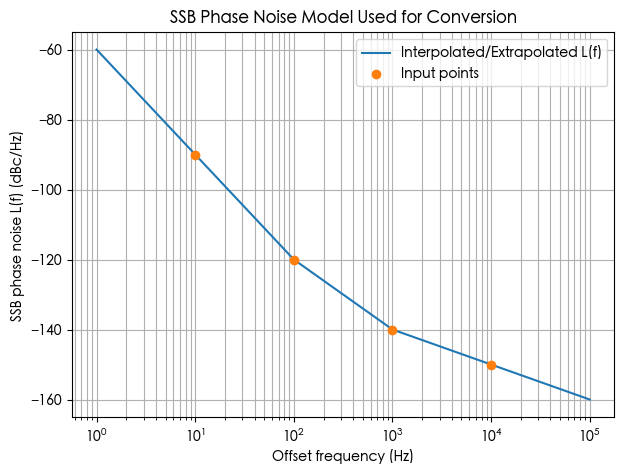
和相噪有什么关系?
相噪 主要是频域描述
Allan 是时域描述
两者可以互相换算(要做积分和噪声模型假设),工程上常见用法是:用相噪估算抖动/近端性能;用 Allan 看秒-小时-天尺度稳定度
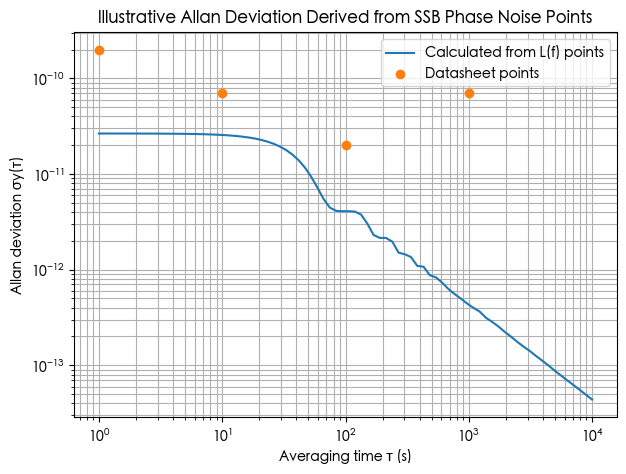
用这些 L(f) 点插值/外推出来的相噪模型
用这些 L(f) 点插值/外推出来的相噪模型
依据该模型推算出来的Allan deviation 曲线,并叠加了 datasheet Allan 点做对照。
依据该模型推算出来的Allan deviation 曲线,并叠加了 datasheet Allan 点做对照。
放回 AR36CPT 这类铷钟的理解
之前看到的那类数据(举例):
意思就是:
“我用 1 秒/10 秒/100 秒 去平均观察它的频率,它的相对频率稳定度大概到什么数量级。”
供电与功耗(别忽略这点)
供电:3.2~3.4 V,典型 3.3 V
预热功耗 5.2 W
稳态功耗 1.6 W
预热时间 5 分钟也就是说:你必须把它当一个“需要热稳定的精密模块”来供电与散热规划,尤其是预热阶段电源能力与热设计要留裕量。
锁定指示(Pin 4)
VOH:Alarm
VOL:Normal Operation也就是:高电平代表告警,低电平代表正常锁定/正常工作(按表格字面理解)。你做系统状态机时可以直接用这个引脚做“硬件级健康指示”。
后记
“原子钟级” = 以原子跃迁为基准的高端频率/时间参考,强调长期准确度、长期稳定度和低老化,整体档位高于 TCXO/OCXO。
Allan 指标 = 用不同平均时间 观察时钟的相对频率稳定度; 看短稳、中稳、长稳以及谁在主导噪声与漂移。
https://www.eet-china.com/mp/a14555.html
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号