
如何旋转和缩放一个同形
我需要帮助
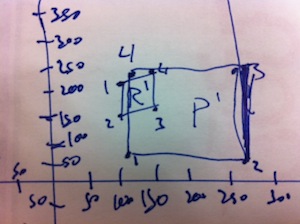
我正在从服务器接收到一个同形,所以我想将此同形规范化到我的应用程序的坐标系中,当我试图用坐标表示一个对象时,服务器应用程序生成接下来的4个点:
收到96.629539,217.31934;97.289948,167.21941;145.69249,168.28044;145.69638,219.84604
我的应用程序生成了接下来的4分:
本地126.0098,55.600437;262.39163,53.98035;259.41382,195.34763;121.48138,184.95235
I你用图形表示这个点,R(接收),P(本地)
看起来所生成的正方形是旋转和缩放的,所以我想知道是否有任何方法将这种旋转--一个比例--应用于服务器单形,以便能够拥有与我的应用程序相同的同形。
谢谢,我需要更多的信息,请问我。
非常感谢您的快速回答,在最后我使用其他近似,就像从服务器获得点和使用findhomography得到反单形一样简单。
homography=findHomography(srcPoints,dstPoints,match_mask,RANSAC,10);
谢谢!

回答 2
Stack Overflow用户
发布于 2012-05-23 07:30:55
我想我想明白了。下面是一个更准确的情节,你的两个同音。其中蓝色是接收到的同形,红色是本地的同形。
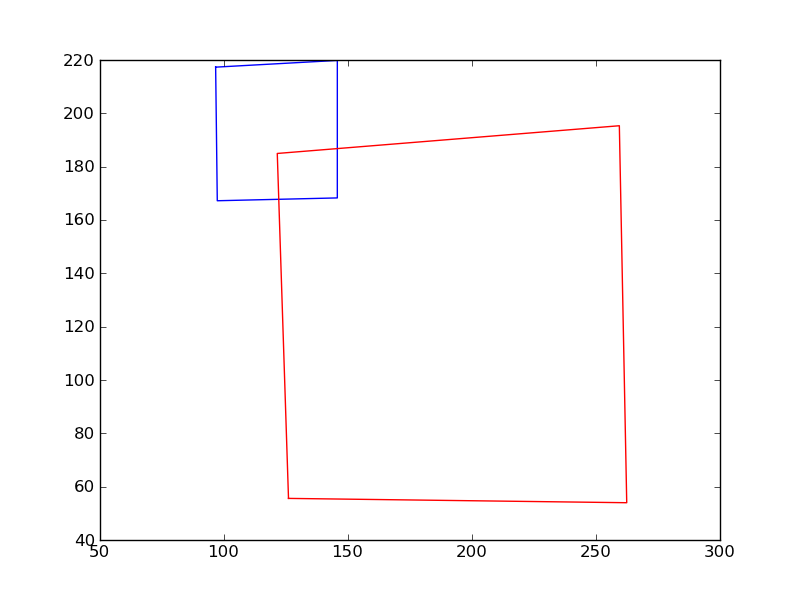
您可以使用OpenCV函数getAffineTransform来计算与3对点对相关的仿射变换(我必须重新组织点对,因为它们的顺序不对)。我在numpy中运行了以下代码:
r = array([[97.289948, 167.21941], [96.629539, 217.31934], [145.69638, 219.84604]], np.float32)
l = array([[126.0098, 55.600437], [121.48138, 184.95235], [259.41382, 195.34763]], np.float32)
A = cv2.getAffineTransform(r, l)这给了我们以下仿射关系:
array([[ 2.81385763e+00, -5.32961421e-02, -1.38838108e+02],
[ 7.88519054e-02, 2.58291747e+00, -3.83984986e+02]])我将其应用到r中,看看是否可以让l确保它像这样工作:
# split affine warp into rotation, scale, and/or shear + translation matrix
T = mat(A[:, 2]).T
matrix([[-138.83810801],
[-383.98498637]])
A = mat(A[:, 0:2])
matrix([[ 2.81385763, -0.05329614],
[ 0.07885191, 2.58291747]])
# apply warp to r to get l
r = mat(r).T
A*r + T
# gives
matrix([[ 126.00980377, 121.48137665, 259.41381836],
[ 55.60043716, 184.9523468 , 195.34762573]])
# which equals
l = mat(l).T
matrix([[ 126.00980377, 121.48137665, 259.41381836],
[ 55.60043716, 184.9523468 , 195.34762573]], dtype=float32)同样值得注意的是,您可以使用Markus Jarderot函数getPerspectiveTransform生成透视图转换,如OpenCV所示。
希望这能帮上忙!
Stack Overflow用户
发布于 2012-05-23 08:28:50
如果将点和转换插入到Maple中,则可以很快得到结果。
> with(LinearAlgebra);
> # The server coordinates
pa := [[96.629539, 217.31934], [97.289948, 167.21941], [145.69249, 168.28044],
[145.69638, 219.84604]]:
> # The local coordiantes
pb := [[126.0098, 55.600437], [262.39163, 53.98035], [259.41382, 195.34763],
[121.48138, 184.95235]]:
> # The placeholder variables for the transformation (last one is '1', because it
# is scale-invariant)
T := [seq]([seq](`if`(i = 3 and j = 3, 1, t[i, j]), j = 1 .. 3), i = 1 .. 3):
V := convert(map(op, T)[1 .. -2], set):
> # Transformation function (Matrix multiplication + divide with 3rd coordinate)
trans := (p, T) -> [
(T[1, 1]*p[1]+T[1, 2]*p[2]+T[1, 3])/(T[3, 1]*p[1]+T[3, 2]*p[2]+T[3, 3]),
(T[2, 1]*p[1]+T[2, 2]*p[2]+T[2, 3])/(T[3, 1]*p[1]+T[3, 2]*p[2]+T[3, 3])
]:
> # Transform pa, and construct the equation system
pat := map(trans, pa, T):
eqs := {op}(zip((p1, p2) -> op(zip(`=`, p1, p2)), pat, pb)):
> # Solve for the transform variables
sol := solve(eqs, V):
> # Populate the transform
eval(T, sol);输出:
[[ .1076044020, -3.957029830, 1074.517140 ],
[ 4.795375318, .3064507355, -430.7044862 ],
[ 0.3875626264e-3, 0.3441632491e-2, 1 ]]若要使用此方法,请将其与服务器点相乘为T * <x, y, 1>。
void ServerToLocal(double serverX, double serverY, double *localX, double *localY)
{
double w;
w = 0.3875626264e-3 * serverX + 0.3441632491e-2 * serverY + 1.0;
*localX = (.1076044020 * serverX - 3.957029830 * serverY + 1074.517140) / w;
*localY = (4.795375318 * serverX + .3064507355 * serverY - 430.7044862) / w;
}另一种方法可以在http://alumni.media.mit.edu/~cwren/interpolator/上读取
这一个可以用C写,给出一个合理的线性代数库。
https://stackoverflow.com/questions/10721289
复制










腾讯云开发者
