一文读懂世界模型(World Model):AI的“数字大脑”,通往AGI的核心基石

一文读懂世界模型(World Model):AI的“数字大脑”,通往AGI的核心基石

霞姐聊IT
发布于 2026-05-08 19:45:12
发布于 2026-05-08 19:45:12
在当下AI领域,“具身智能”和“通用人工智能(AGI)”已成为热议话题,而支撑这些技术落地的核心基础,正是“世界模型(World Model)”。
世界模型并不是某个具体的模型,而是AI理解物理世界、预判未来并自主决策的“内在思维系统”。简单来说,它让AI在“脑海中”构建一个虚拟世界,在行动前先“脑补”后果,再实际执行。
本文将以通俗易懂的语言,结合干货内容,全面拆解世界模型的起源、原理、应用及最新进展,尽量做到即便是新手也能轻松理解。
一、开篇先搞懂:世界模型到底是什么?
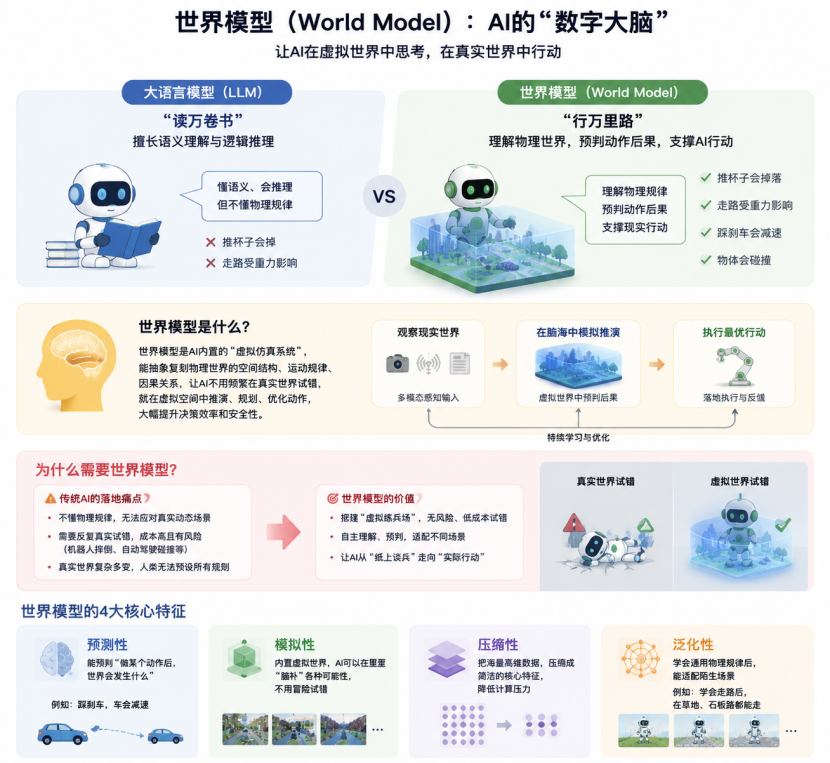
很多人会将世界模型和大语言模型(LLM)混淆,但二者的核心定位完全不同:
lLLM(如GPT、文心一言)擅长“读万卷书”,理解语义、进行推理,但不掌握物理规律——它无法理解“推杯子会掉”“走路会受重力影响”。
l世界模型擅长“行万里路”,能够理解物理世界规则,预测动作后果,并支持AI在现实世界中实际行动。
通俗地说,世界模型是AI内置的“虚拟仿真系统”,它能抽象复刻物理世界的空间结构、运动规律和因果关系,让AI无需频繁在真实环境中试错,就能在虚拟空间中推演、规划和优化动作,从而大幅提升决策效率和安全性。
世界模型之所以必要,是为了突破传统AI“落地痛点”,让AI从“纸上谈兵”走向“实际行动”。具体来说:
l传统AI局限:纯语言模型或简单算法要么不懂物理规律,无法应对动态场景;要么必须在真实环境中反复试错,成本高昂(如机器人摔倒、自动驾驶碰撞导致硬件损耗),且存在安全风险。
l复杂环境挑战:真实世界场景多变且充满不确定性,人类无法预设所有规则,AI必须具备自主理解和预判能力,才能适应不同环境。
世界模型解决了这些问题,为AI搭建了“虚拟练兵场”,让其在无风险、低成本环境中学会适应世界、预测结果,这也是其成为具身智能和通用人工智能核心基石的关键原因。
核心特征
l预测性:能预判“做某个动作后,世界会发生什么”(如“踩刹车,车会减速”)。
l模拟性:内置虚拟世界,AI可以在其中尝试各种可能性,无需冒险试错。
l压缩性:将摄像头、雷达等高维数据压缩为核心特征,降低计算压力。
l泛化性:掌握通用物理规律后,能适应陌生场景(如学会走路后,在草地或石板路上同样可行)。
二、追溯根源:世界模型是怎么来的?
世界模型的思想,本质是“模仿人类的认知方式”,其发展大致可以分为三个关键阶段:
1.早期思想:源于人类的“心理模型”
早在1943年,心理学家Kenneth Craik提出,人类在日常生活中依靠大脑构建“心理模型”来预测事件结果,从而进行高效决策。
例如,看到下雨会预判“不打伞会淋湿”,进而决定带伞。
这种内部模拟环境的理念,为后来的世界模型提供了思想基础。
到了20世纪80-90年代,AI研究者将心理模型思想引入机器人和智能体领域,提出智能体在自主行动时需要构建内部环境模型,以减少对真实环境的频繁试错。
这一阶段的研究为强化学习和模型预测控制的理论奠定了基础。
2.里程碑:2018年,现代世界模型正式成型
2018年,Ha和Schmidhuber提出了经典的世界模型架构——VAE+RNN。
该方法首先使用变分自编码器(VAE)将高维视觉输入压缩为潜在空间表示,然后利用循环神经网络(RNN)预测潜在状态的动态变化,实现“虚拟试错”。
这是世界模型首次从理论走向可落地应用,为后续所有基于潜在空间的世界模型奠定了基础。
3.爆发期:2022年后,自监督范式普及并深化
自2022年起,世界模型进入快速发展期。
其中最重要的突破是Yann LeCun团队提出的JEPA(联合嵌入预测架构)。
JEPA通过自监督学习优化潜在空间预测,使模型在高维、复杂环境中更加高效和稳定。
相比传统方法,它减少了计算冗余,提高了泛化能力,能够处理更多不确定性场景。
在这一阶段,世界模型研究呈现出几个显著趋势:
自监督学习成为主流:不依赖人工标注,能从大量无标签视频数据中自主学习物理规律。
多模态融合:结合视觉、文本和传感器数据,实现对复杂环境的综合理解。
端侧部署和轻量化:针对机器人和自动驾驶场景,世界模型开始在低算力设备上实时运行。
具身智能与交互增强:模型不仅能够预测状态,还能在虚拟环境中进行动作推演,支撑机器人、人形智能体等实际操作。
这一时期奠定了世界模型在具身智能、自动驾驶、工业仿真等领域快速落地的基础,同时为未来AGI的发展提供了核心技术支撑。
三、核心原理:AI的“虚拟大脑”,到底怎么工作?
世界模型的工作逻辑与人类“观察-思考-行动”的流程高度相似,其核心由三个模块组成,形成闭环联动:
1.感知编码器:AI的“眼睛和耳朵”
负责接收外界的多模态数据,例如摄像头画面、雷达信息或人类文本指令。
通过CNN、VAE等技术,将这些高维、杂乱的数据压缩为简洁、有语义的低维特征,例如“杯子”“桌子”“距离1米”。
2.动态模型:AI的“大脑核心”
作为世界模型的核心模块,动态模型负责学习状态变化规律,
例如:“推杯子→杯子滑动→掉落”“踩油门→车加速”,
用于建模当前状态与动作对未来状态的因果关系。
常用技术包括RNN、Transformer和概率模型,既可进行确定性预测(如“踩刹车一定减速”),也可进行不确定性预测(如“雨天刹车减速距离延长”)。
3.决策控制器:AI的“手脚”
基于动态模型的未来状态预测,结合强化学习或路径规划算法,选择最优动作。
例如,“预判行人可能横穿马路,提前减速”“预判杯子会掉,伸手接住”,并将动作指令下发给执行单元(机器人或自动驾驶汽车)。
整个流程形成闭环:AI观察环境 → 编码特征 → 预测未来 → 执行动作 → 接收反馈 → 优化模型,使系统随着使用不断提高精度和适应性
四、主流流派:世界模型有哪些“技术路线”?
依据建模范式、技术核心与应用导向的差异,结合中科院、MBZ 未来实验室、新加坡南洋理工大学(NTU)、牛津大学(Oxford)联合发表的世界模型综述(2026),当前世界模型可划分为四大核心分支,各分支定位清晰、侧重不同,适配多样化场景需求:
1.潜空间世界模型(Latent-space WMs)
以低维潜在表征为核心,通过VAE、JEPA等技术将高维观测数据(如图像、雷达)压缩为简洁、有语义的潜在特征,并在该空间内建模环境动态变化与因果关系。
其核心优势是计算效率高、算力开销低,无需冗余的高维数据处理,适合机器人、车载设备等端侧实时部署场景。
典型代表模型有Dreamer系列和JEPA(杨立昆团队提出)
2.观测层生成式世界模型(Observation-level generative WMs)
不进行中间特征压缩,直接对原始高维观测数据(如视频帧)进行时序建模与场景生成,追求画面细节还原和物理仿真精度。
该分支保留高维数据中的完整细节,适合长时序视频生成、高保真虚拟场景仿真、数字孪生等应用场景。
代表模型包括OpenAI Sora和英伟达Cosmos。
3.强化学习驱动世界模型(RL-driven WMs)
该分支以模型基强化学习(MBRL)为核心目标与落地导向,将世界模型作为智能体的专属虚拟仿真环境,通过内部无风险想象推演生成仿真交互轨迹,大幅降低真实环境试错成本、提升策略训练样本效率。
分支核心聚焦“模拟推演 - 策略训练 - 迭代优化”的闭环决策流程,可兼容概率动态建模能力,应对真实场景的随机扰动与环境不确定性,完美适配自动驾驶、人形机器人、工业智能控制等高安全要求的复杂决策场景。
典型代表方法包括PlaNet、MBPO(Model-Based Policy Optimization)、SLAC,这类方法以世界模型为核心支撑完成策略优化,不局限于固定的潜在空间建模架构,可灵活适配潜空间表征、直接观测生成等多种底层建模方式。
4.对象中心世界模型(Object-centric WMs)
以“对象”为核心建模单元,先对环境中独立对象(如车辆、行人、物体)进行识别与分割,再分别建模各对象的属性、运动规律及交互关系,最终整合为完整世界模型。
该方法在空间关联和因果推理上优势明显,可精准捕捉多对象交互的动态变化,适配复杂交通场景和多智能体协同任务。结合Transformer架构,可进一步提升长时序建模能力,
例如Google Genie 3可归入该类的延伸应用。
五、这些突破值得关注
近几年,世界模型技术发展迅速,核心突破可概括为七个方向,每个方向都在推动AI向“通用智能”迈进:
1.基础世界模型大型化与通用化
以 Genie 2(Google DeepMind)、HWM 2.0(DeepMind)为代表,模型能够从特定任务(如视频生成)扩展到通用世界建模任务,支持复杂场景的高保真可交互模拟。
2.自监督范式成为主流
以 JEPA 为代表,世界模型可以从大量无标注视频中自主学习环境动态和物理规律,大幅降低训练成本,并提升泛化能力,减少对人工标注的依赖。
3.大模型+世界模型“双脑架构”
LLM 负责理解任务和指令(如任务分解),世界模型负责动作推演与落地执行(如机器人如何拿取物体),二者协同实现端到端自主决策。
4.端侧轻量化与实时部署
地平线、黑芝麻、英伟达等推出专用芯片,使世界模型能够在机器人、自动驾驶和其他低算力设备上实时运行,无需依赖云端算力,从而推动量产落地。
5.物理引擎融合数据驱动,提升建模精度
通过将 Motive、HWM 等物理引擎的规则融入世界模型,可精准模拟物理现象,如流体、柔性物体、交通动态等,实现物理一致性和高保真预测。
6.少样本/零样本适应能力
借助大规模预训练模型,世界模型能够在只提供少量样本的情况下快速适配新场景,例如首次遇到新类型物体时也能预测动作结果。
7.国内落地加速,商业化验证
国内人形机器人、自动驾驶和仿真平台已开始量产搭载轻量化世界模型,在具身控制、交通预测和仿真规划等场景进行验证,逐步形成自主技术体系。
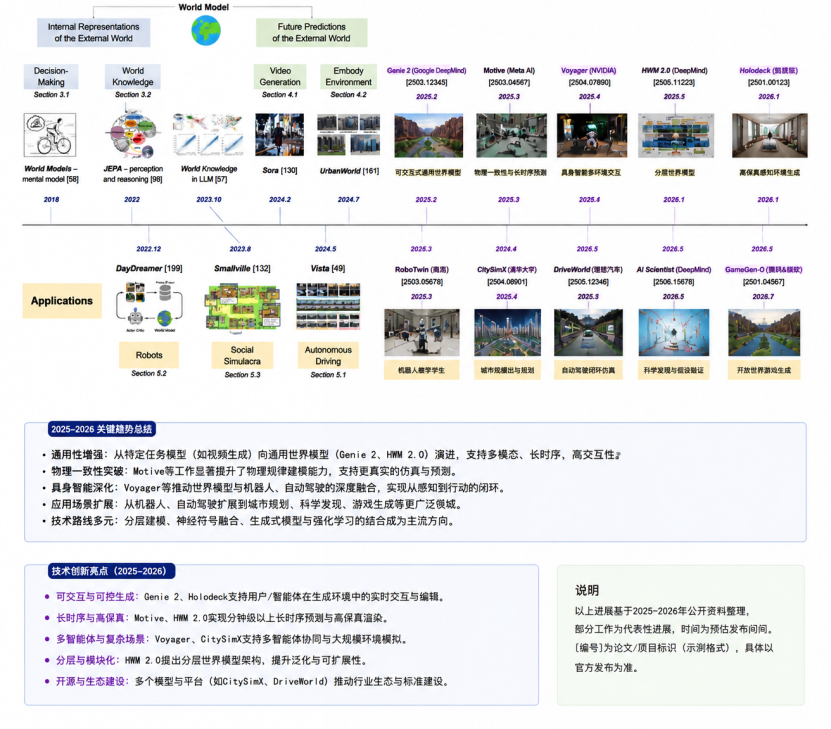
技术演进时间线(2018—2026)
1.2018 年:Ha & Schmidhuber 提出的经典 World Model,开启现代世界模型时代。
2.2022—2023:JEPA、Smallville、DayDreamer 等,强调潜在空间表示与自监督学习。
3.2024—2025:Genie 2、Meta AI、Sora、Vista、Voyager、HWM 2.0 等大模型,推动高保真、交互式和长时序建模。
4.2025—2026(预测):Holodeck、RoboTwin、CitySim、DriveWorld 等,标志着可交互、长时序、多智能体、分层与生态建设方向的突破。
图表显示的技术趋势包括:
从特定任务生成向通用世界模型扩展、从高维生成到可交互操作、从监督学习向自监督学习迁移。
场景落地覆盖机器人、自动驾驶、城市仿真、游戏生成、科学发现等五大核心方向。
六、落地场景:世界模型早已不是“实验室技术”
现在,世界模型已经渗透到生活和工业的多个领域,其核心落地场景主要有五个,每一个都与我们日常和生产密切相关:
1. 人形机器人与具身智能(最核心场景)
特斯拉Optimus、优必选Walker X等人形机器人能够保持平衡、灵活抓取物体,依靠世界模型在虚拟空间中反复推演步态和抓取动作,再迁移至真实环境,从而大幅降低摔倒和操作失误的概率。
2. 高阶自动驾驶
L2-L4级自动驾驶系统离不开世界模型的预测能力:
它可以实时预测行人和车辆的未来轨迹,预判路口交通变化,提前规划避障路径,并在虚拟空间中模拟极端工况(如突发横穿),显著提升行车安全性。
3. 生成式AI(长视频与虚拟场景)
OpenAI Sora、Google Genie等生成式AI能够制作逼真长视频,世界模型保证视频中物体运动遵循物理规律(如苹果掉落、水流流动),避免出现“悬浮”或“穿模”等不合理现象。
4. 工业智能
工业机械臂的装配、焊接及巡检机器人的路径规划都可通过世界模型优化:在虚拟空间中模拟和推演轨迹,避免碰撞、提升效率,尤其适用于高危或复杂的工业环境。
5. 数字孪生与仿真推演
城市交通、能源系统和智能制造的数字孪生依赖世界模型进行未来态势模拟,例如预测高峰期交通拥堵、推演工厂生产流程优化方案,为决策提供可靠参考。
七、现存瓶颈与未来趋势
尽管世界模型近年来实现了快速迭代与规模化落地,但行业发展仍面临诸多技术瓶颈亟待突破:长时序预测过程中易出现误差累积导致的推演“跑偏” 问题,复杂物理场景(如流体运动、柔性物体形变)的建模精度仍有待提升,同时端侧设备的算力约束尚未完全解决,一定程度上制约了其规模化普及。
结合当前行业技术趋势与前沿研究方向,未来世界模型将重点朝着以下五大方向稳步推进:
1.高维多模态统一建模:打通视觉、雷达、文本、传感等多源异构数据的表征壁垒,实现对物理世界更全面、更精准的环境理解与状态感知;
2.长时序无漂移预测:攻克多步预测误差累积难题,突破时序推演的稳定性瓶颈,实现小时级甚至更长周期的精准、稳定推演;
3.自监督/ 少样本学习深度普及:进一步强化模型的自主学习能力,持续降低对人工标注数据的依赖,大幅提升模型在陌生场景下的快速适配能力;
4.大模型与世界模型深度融合:持续深化“双脑协同” 架构,推动二者在语义理解、物理推演、动作执行上的无缝衔接,成为通用具身智能体的标准核心架构;
5.安全与可解释性升级:将安全约束与伦理框架深度植入模型设计,强化决策过程的可追溯性与可管控性,破解AI “黑箱” 难题,保障其在高安全需求场景的可靠应用。
八、最后总结
世界模型的核心价值,在于推动AI 从 “单纯的认知思考” 向 “认知与行动兼备” 跨越 —— 它如同智能体内置的 “数字大脑”,赋能 AI 真正理解物理世界的运行规律、精准预判未来状态、自主规划最优决策路径。
从2018 年经典 World Model 架构奠定基础,到如今大模型融合、端侧轻量化落地、多场景商业化验证,世界模型已明确成为通往通用人工智能(AGI)与具身智能的核心技术基石。
未来,随着各类技术瓶颈的逐步突破,世界模型将持续渗透到自动驾驶、人形机器人、工业仿真、数字孪生等更多领域,深刻改变人类生产生活方式,开启物理智能的全新发展阶段。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-08,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号