从TMR 线性磁场传感器噪音参数展开的思考(YUNSWJ仿真版)

从TMR 线性磁场传感器噪音参数展开的思考(YUNSWJ仿真版)
云深无际
发布于 2026-01-07 13:43:33
发布于 2026-01-07 13:43:33
上个文章说了这个传感器的信号链设计,在后面有一段对噪音建模的部分,我个人是很喜欢这部分的,这篇文章展开讲讲:
我们有的数据只有这个
我们有的数据只有这个
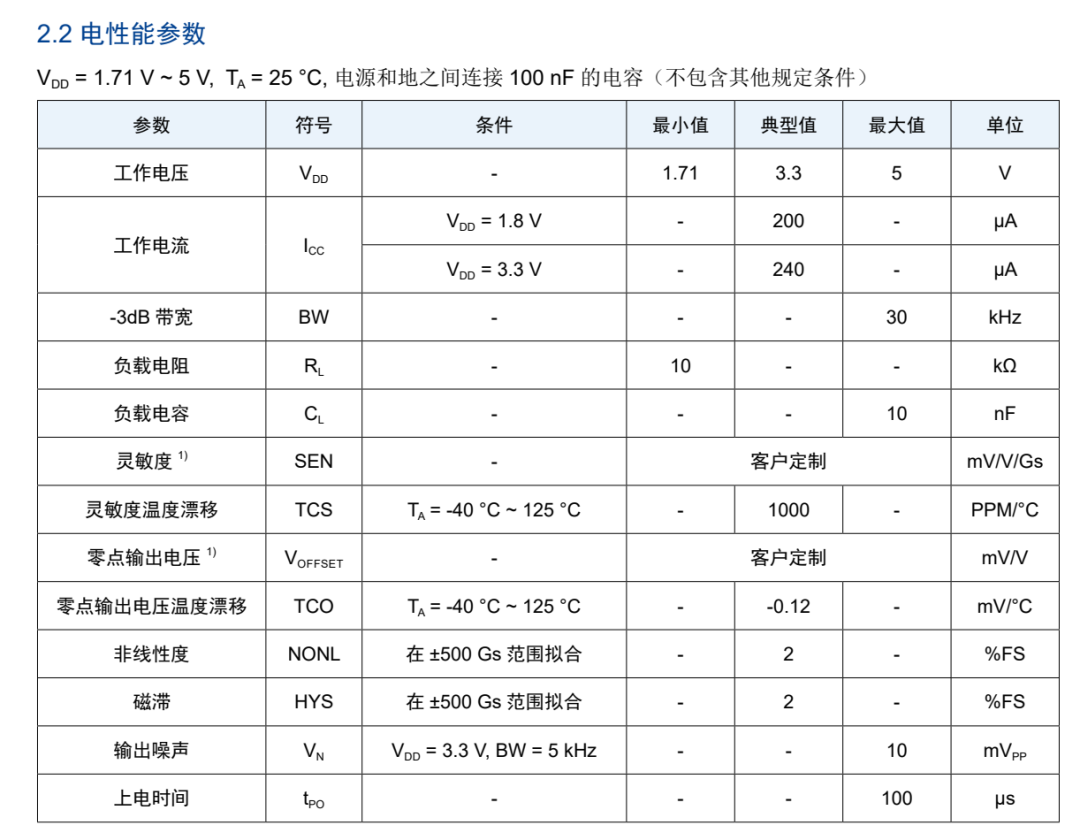
模型的出发点:数据手册的“10 mVpp @ 5 kHz”
TMR2615x 手册中唯一给出的定量噪声指标是:
输出噪声 ≤ 10 mVpp(带宽 5 kHz)
这是一种常见的“带宽内峰峰值噪声”表述,但工程设计与仿真通常更需要:均方根噪声 (RMS),等效白噪声谱密度 [V/√Hz],若干低频 1/f 参数(转折频率 );因此第一步是把它从“统计峰峰值”转换为频谱参数。
从峰峰值到 RMS、再到噪声密度
(1) 高斯分布近似
对高斯噪声,约有:
于是:
(2) 转成白噪声密度
噪声谱密度定义为:
代入 :
这一步把一个“经验总值”变成了可频谱化的白噪声底。
增加低频 1/f 成分(这是完全没有体现,但是有)
实际磁阻桥 + 放大器的噪声不会完全平坦:在几十 Hz 以下会出现 1/f(flicker)上升。 因此我们定义一个简单的频谱函数:
当 :,纯白噪声;
当 :,即 1/f 型谱;在仿真里取 作为保守假设;这样即可得到一条从低频上升、随后在高频趋平的典型噪声谱。
将频域谱转化为时域随机信号
采用两步合成:
白噪声分量
这是一个均匀白噪声,其方差满足目标密度。
粉红噪声 (1/f)在频域生成白噪声的 FFT ,再乘以
以获得幅度随频率下降的分量,然后逆 FFT 回时域。
叠加
这样 就是一段具有指定 与 1/f 特征的连续噪声序列。
再通过传感器本体带宽建模(30 kHz LPF)
TMR2615x 自身输出带宽约为 −3 dB@30 kHz。 可等效为一阶低通:
离散化后递推:
其中: 。
这一步使频谱在 30 kHz 之后滚降,得到与实际输出类似的时域噪声波形。
频域积分与结果验证
得到带限序列 后,计算功率谱密度 ,并积分:
通过数值积分验证,结果约:。
噪声随带宽 ∝ √B 收敛,低于 1 kHz 时 ≈ 0.47 mVrms,这与经验公式 在 1/f 以外的范围完全一致。
模型有什么用?
可直接用于前端噪声预算:给定 、、ADC 带宽,预测系统 RMS 噪声,可调整 模拟不同制程/温度下的 1/f 变化,也可以插入运放、RC 网络的噪声源叠加,实现端到端噪声仿真,如果与实测频谱对比后,可反向拟合出真实的 和 。
模型从“10 mVpp@5 kHz”的经验值出发,经统计换算、白噪声谱化、叠加 1/f 成分、施加 30 kHz 低通、再频域积分,构建出一套既符合手册宏观指标、又能在时频两域可视化的等效噪声生成模型。
模型的层次结构总结
层次 | 数学形式 | 物理含义 |
|---|---|---|
1. 噪声源 | 传感器桥路与放大器的本征噪声密度、1/f 转折 | |
2. 噪声谱 | 频域能量分布 | |
3. 时域生成 | 白噪 + 1/f 滤波 | 模拟实际输出波动 |
4. 传感器带宽滤波 | 一阶低通(30 kHz) | 反映器件输出限制 |
5. RMS 积分 | 获取总噪声功率 | |
6. 与系统比对 | → ADC LSB | 估算信噪比与分辨率 |
=== Chain parameters ===
TMR en_white=21.43 µV/√Hz, fc_1f=50 Hz, fc_sensor=30 kHz
R_source_tot=1220.0 Ω; opamp en=7.0 nV/√Hz (fc_1f=100 Hz), in=2.0e-15 A/√Hz
Post-LPF fc_post=48 kHz; ADC: Vref=3.3 V, N=16, fs=200 kS/s, e_q=45.967 nV/√Hz
=== Integrated RMS at ADC node (µVrms) ===
B[Hz] TMR Res(series) OpAmp_v OpAmp_i ADC_quant Total
100 408.9 0.0 0.2 0.0 0.5 408.9
300 533.2 0.1 0.2 0.0 0.8 533.2
1000 795.4 0.1 0.3 0.0 1.5 795.4
3000 1253.3 0.2 0.4 0.0 2.5 1253.3
10000 2143.4 0.4 0.7 0.0 4.6 2143.4
20000 2819.6 0.6 1.0 0.0 6.5 2819.6
30000 3176.8 0.7 1.2 0.0 8.0 3176.8
50000 3485.9 0.9 1.4 0.0 10.3 3485.9
模型扩展
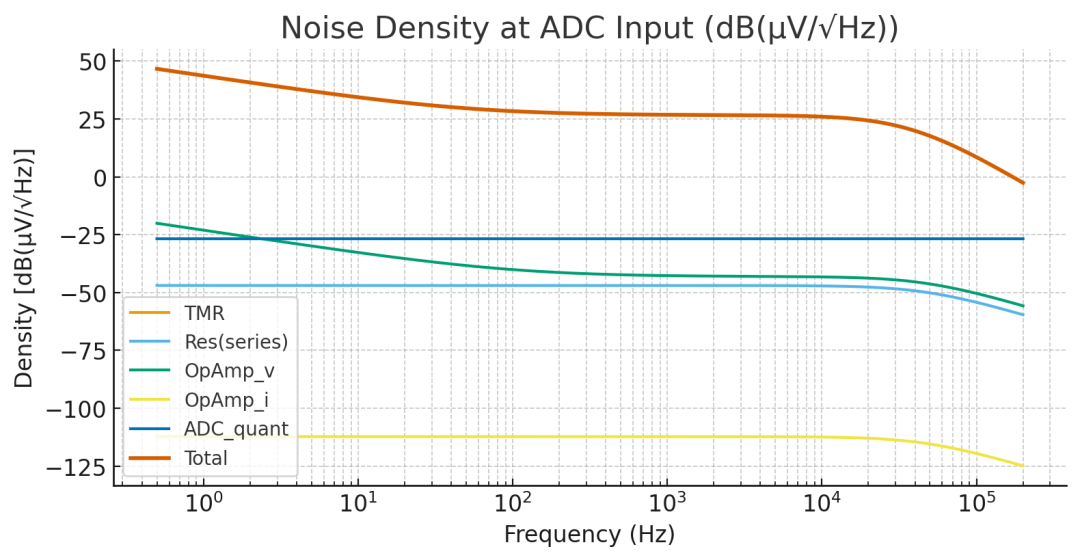
拓展为完整系统噪声链(TMR → 缓冲运放 → ADC 输入),计算各级噪声贡献与总输入参考噪声密度
output
output
噪声谱密度叠加(ADC 端,单位 dB(µV/√Hz)):TMR 曲线在低频因 1/f 上升,高频趋平并在 30–50 kHz 处被两级极点共同滚降;其它源基本在 −40 dB(µV/√Hz)以下。
output (1)
output (1)
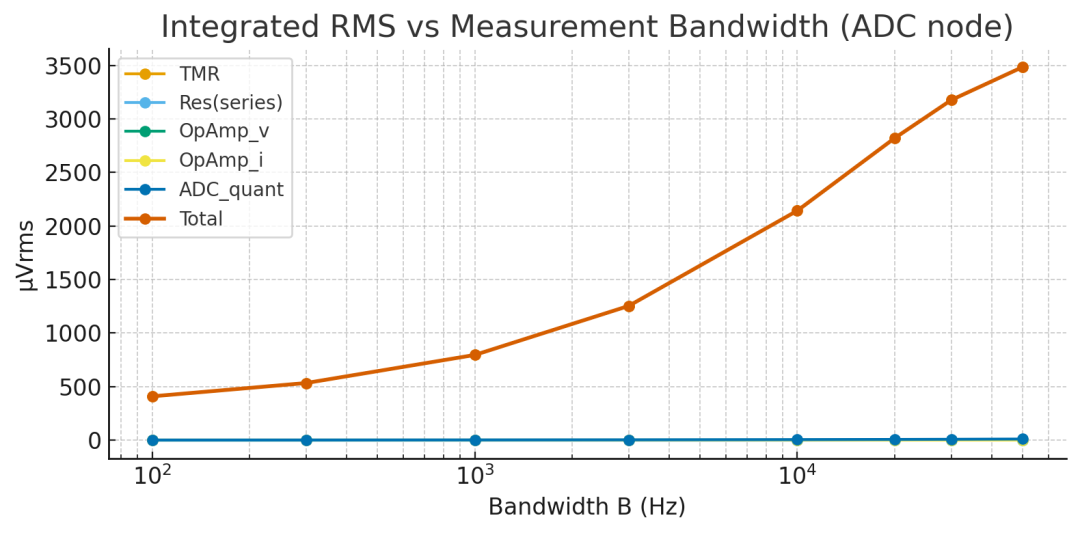
不同带宽下的 RMS 曲线:总曲线几乎与 TMR 一致,其他源几乎“贴地”。
解读结果
“默认参数”为:(T=300 K、R_sensor≈1 kΩ、R_series=220 Ω、OPA 类运放 en≈7 nV/√Hz、ADC 16-bit 200 kS/s、VREF=3.3 V、后级极点≈48 kHz、TMR 白噪声≈21.4 µV/√Hz、1/f 转折≈50 Hz、TMR本体极点≈30 kHz)下,链路总噪声由 TMR 自身主导,运放、量化、串联电阻噪声都很小。
典型带宽下(ADC 节点)集成 RMS:
B=1 kHz:≈ 0.80 mVrms(几乎全是传感器)
B=10 kHz:≈ 2.14 mVrms
B=30 kHz:≈ 3.18 mVrms
这与之前“器件自身噪声仿真”的数量级一致:带宽越小,RMS ~ √B 收敛;1/f 只在很低频(<几百 Hz)抬头。
链路的电压噪声换算成输入参考的磁场噪声
把噪声“输入参考到磁场”(用灵敏度 S mV/V/Gs、VDD、ratiometric)输出 nT/√Hz 或 Gs/√Hz
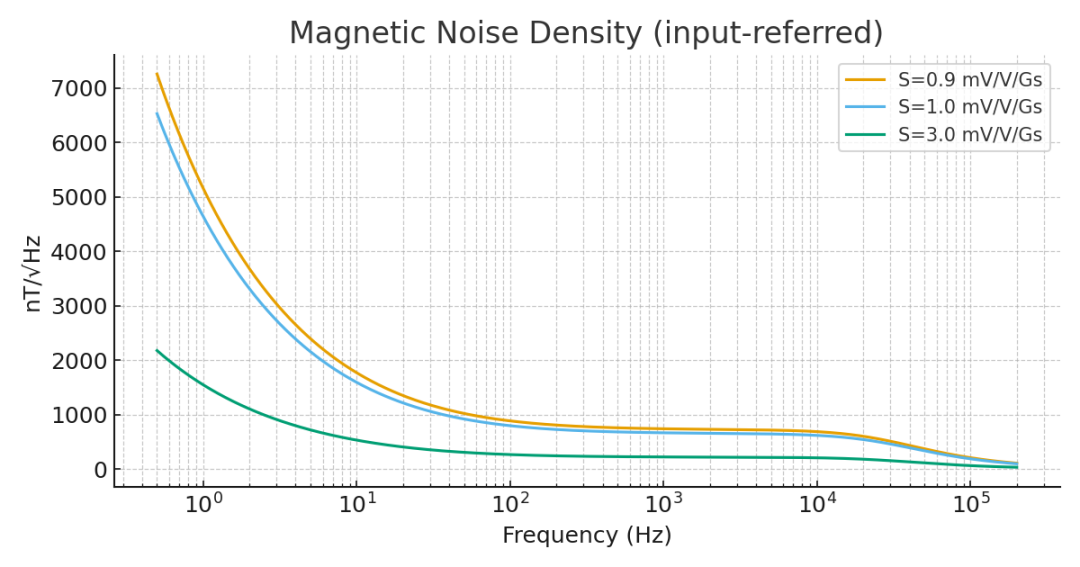
magnetic_noise_density
magnetic_noise_density
磁噪声密度(1 kHz / 10 kHz 处)
S=0.9 mV/V/Gs:739 / 686 nT/√Hz
S=1.0 mV/V/Gs:665 / 618 nT/√Hz
S=3.0 mV/V/Gs:222 / 206 nT/√Hz,灵敏度越高 → 把同样的电压噪声“摊薄”到更小的等效磁噪声。
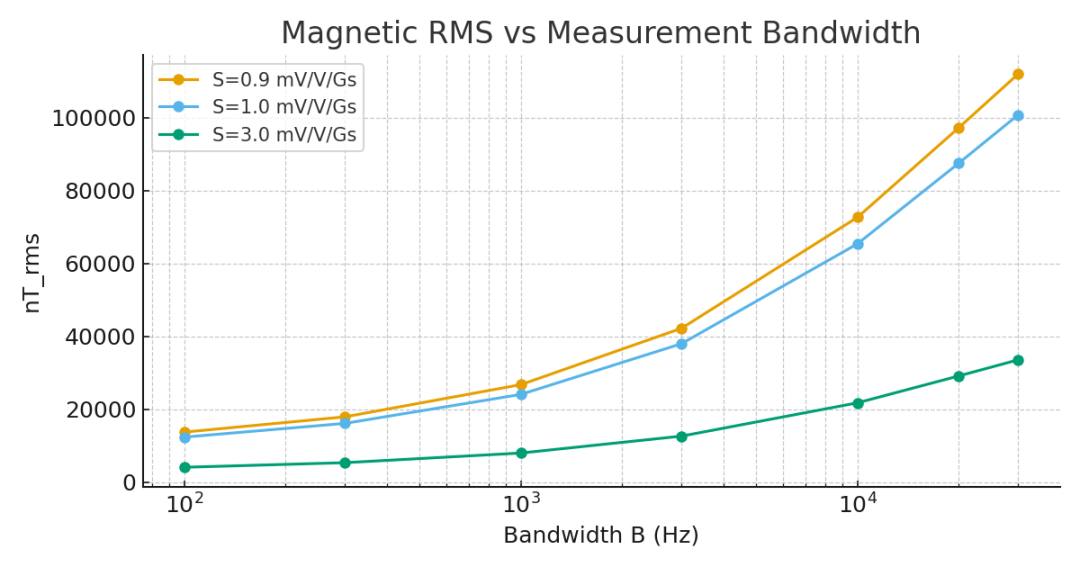
magnetic_rms_vs_bw
S=1.0 mV/V/Gs:B=100 Hz→12.4 k nT_rms,B=10 kHz→70.8 k nT_rms,B=30 kHz→100.7 k nT_rms
S=3.0 mV/V/Gs:B=100 Hz→4.13 k nT_rms,B=10 kHz→23.6 k nT_rms,B=30 kHz→33.6 k nT_rms
=== Magnetic noise density (input-referred to magnetic field) ===
S = 0.90 mV/V/Gs → eB(1 kHz)= 738.96 nT/√Hz, eB(10 kHz)= 686.23 nT/√Hz
S = 1.00 mV/V/Gs → eB(1 kHz)= 665.06 nT/√Hz, eB(10 kHz)= 617.61 nT/√Hz
S = 3.00 mV/V/Gs → eB(1 kHz)= 221.69 nT/√Hz, eB(10 kHz)= 205.87 nT/√Hz
=== Integrated magnetic RMS vs bandwidth (nT_rms) ===
S = 0.90 mV/V/Gs : B= 100 Hz → 13768.9 nT_rms, B= 300 Hz → 17954.0 nT_rms, B= 1000 Hz → 26782.2 nT_rms, B= 3000 Hz → 42222.5 nT_rms, B= 10000 Hz → 72646.8 nT_rms, B= 20000 Hz → 97217.4 nT_rms, B= 30000 Hz → 111904.8 nT_rms
S = 1.00 mV/V/Gs : B= 100 Hz → 12392.0 nT_rms, B= 300 Hz → 16158.6 nT_rms, B= 1000 Hz → 24104.0 nT_rms, B= 3000 Hz → 38000.2 nT_rms, B= 10000 Hz → 65382.1 nT_rms, B= 20000 Hz → 87495.7 nT_rms, B= 30000 Hz → 100714.4 nT_rms
S = 3.00 mV/V/Gs : B= 100 Hz → 4130.7 nT_rms, B= 300 Hz → 5386.2 nT_rms,
换算
电压⇋磁场:(单位:Gs/√Hz;1 Gs=10⁵ nT),等价 PSD:。
这里 取 mV/V/Gs,换算成 V/V/Gs;VDD 取 3.3 V(ratiometric),其余链路参数与前一步一致(TMR 白噪 ≈21.4 µV/√Hz、1/f≈50 Hz、TMR极点≈30 kHz,缓冲+后级极点≈48 kHz,16-bit/200 kS/s SAR),由于此器件的“电压噪声底+带宽”较高,磁等效噪声取决于你选择的灵敏度 S.
公式整理
这个传感器使用的公式还是非常基础的,感觉有必要做一个总结和整理,平时也可以用的上,公式体系系统整理为五大类, 包括:带宽与极点、噪声、采样保持建立时间、比例式参考、标定与分辨率;每条公式都注明来源、适用条件与单位说明,方便大家在仿真或原理图设计时直接使用。
抗混叠与带宽设计公式
限定输入带宽 以避免混叠、降低噪声。
(1) 一阶 RC 极点频率
:传感器输出串联电阻(Ω)
:输入端对地电容(F)
选取 ,典型抗混叠带宽≈采样频率的 1/3。
(2) 一阶系统时间常数
例如 30 kHz 带宽 → τ≈5.3 µs(TMR 本体典型值)。
(3) 二阶(Bessel / MFB)滤波器通带选取
:希望的过采样比(4 ~ 8 倍常用)。
噪声建模与积分公式
(1) 白噪声密度与总 RMS 噪声
:等效输入噪声密度 [V / √Hz]
:测量或通带带宽 [Hz]
(2) 由 pp 值推 rms (高斯分布)
(3) 由 rms 推白噪声密度
(4) 含 1/f 转折频率的综合噪声模型
:1/f 转折频率(典型 50 Hz 级)
积分求总 RMS:
(5) 噪声随带宽的经验关系(30 kHz 极点)
ADC 采样保持(S/H)建立时间与源阻
保证采样窗内电容充电至目标精度。
(1) 指数充电误差关系
要求 。
(2) 源阻上限公式
:采样保持时间(s)
:采样电容(F)
:分辨率(bit)
(3) 一般经验
(4) 与RC抗混叠联合时的限制
总源阻 必须同时满足:
抗混叠建立
比例式采样 (Ratiometric Reference)
消除 VDD 波动导致的比例增益误差。
当 VOUT ∝ VDD 、VREF = VDD 时:
→ 供电噪声 在比值中被抵消,增益温漂仅剩 TMR 桥及前放放大器自身的漂移。
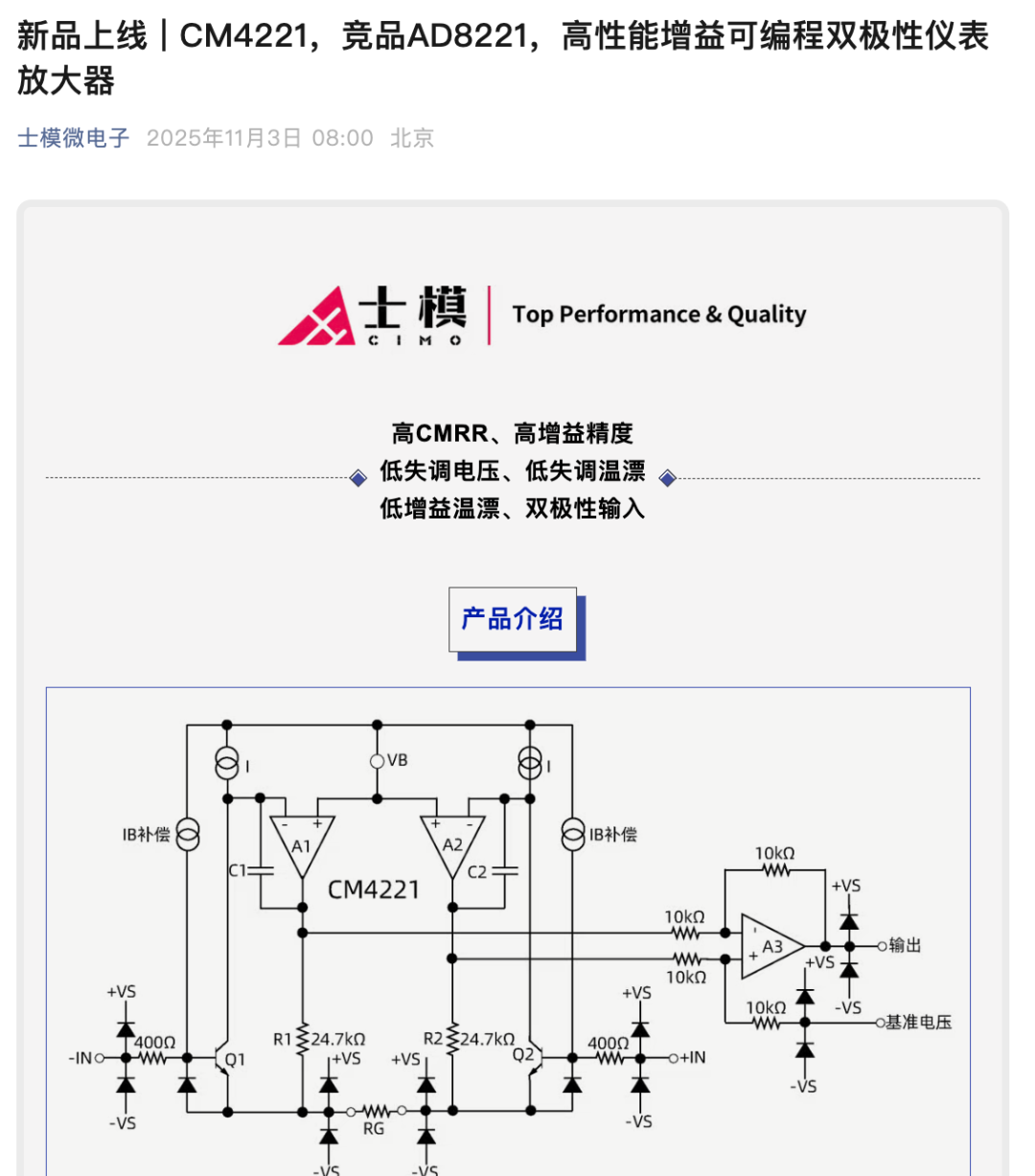
我看见就今天又出新品了
我看见就今天又出新品了
灵敏度、分辨率与标定
(1) 线性灵敏度定义
(2) 满量程条件(避免饱和)
(3) ADC 码分辨率转磁场分辨率
(4) 两点增益/零点标定
ADC 输出线性化:
(5) 温度漂移补偿(线性近似)
TCS≈1000 ppm/°C,TCO≈−0.12 mV/°C。
快速查表(汇总)
分类 | 公式 | 含义 | 单位 |
|---|---|---|---|
抗混叠 | RC 极点频率 | Hz | |
一阶时间常数 | s | ||
噪声 | 白噪声积分 | V | |
反算噪声密度 | V/√Hz | ||
高斯 pp→rms | |||
含1/f噪声谱 | |||
S/H | 建立时间约束 | Ω | |
比例式 | 抵消VDD波动 | — | |
灵敏度 | 灵敏度定义 | mV/V/Gs | |
满量程 | 不饱和条件 | mV/V/Gs | |
分辨率 | 磁分辨率 | Gs/LSB | |
标定 | 两点校准方程 |
后记
由一个参数引出了这么多的内容,还是比较意外的,但是需要吐槽的是,磁性传感器的参数极多,需要更加多的参数来进行仿真分析
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-11-03,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号