四元数到达万向节锁
为了避免旋转时的角度锁定,我尝试切换到四元数。不知怎么的,我还在设法找到万向节锁。
我不确定是由于我实现的数学,还是设计错误,所以请指出我是否应该改变我的对象坐标的方法。
我的每个对象都持有一个X,Y,Z值,以及一个俯仰,偏航,滚动值。当我更改旋转值时,对象将根据上述信息重新计算其顶点。这一逻辑如下:
// vertex array
vertices[x] -= /*Offset by origin point*/;
// Quat.'s representing rotation around xyz axes
Quaternion q1 = Quaternion(glm::vec3(1,0,0),pitch);
Quaternion q2 = Quaternion(glm::vec3(0,1,0),yaw);
Quaternion q3 = Quaternion(glm::vec3(0,0,1),roll);
// total rotation
Quaternion TotalRot = ( (q3 * q2) * (q1) );
// conversion of original coordinates to quaternion
Quaternion Point1 = Quaternion(0, vertices[x].x(), vertices[x].y(), vertices[x].z());
// resulting rotated point
Quaternion Point2 = Quaternion( (TotalRot * Point1) * TotalRot.inverse() );
// placing new point back into vertices array
vertices[x] = QVector3D(round(Point2.v.x),round(Point2.v.y),round(Point2.v.z));
vertices[x]+= /*Undo origin point offset*/;"vertices[]“是对象顶点数组。上面注释掉的原点偏移量只是为了使对象围绕适当的原点旋转,因此相对于0,0,0,0,0,0,0,0,0,因为旋转发生在该点附近(对吗?)
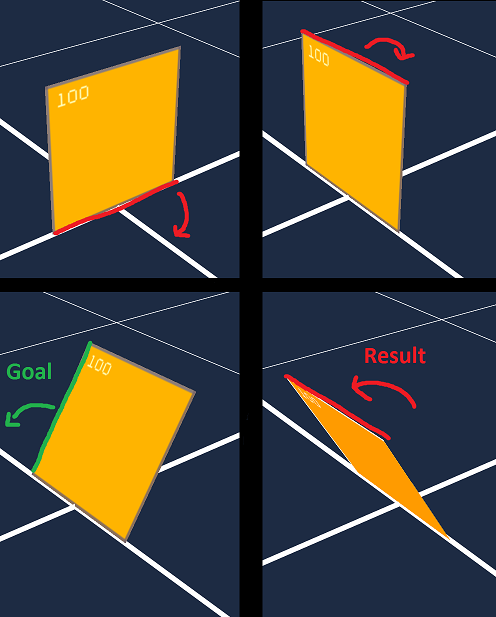
我对我的问题有一个形象的描述,我首先偏航90度,俯仰45度,然后-90滚动,但滚动轴变得平行于俯仰轴:
编辑:
我试着把这3轴四元数相乘,然后乘以4x4矩阵,然后乘以顶点点,但我仍然把万向节锁/到达奇点相乘!
Quaternion q1 = (1,0,0,pitch);
Quaternion q2 = (0,1,0,yaw);
Quaternion q3 = (0,0,1,roll);
Quaternion qtot = (q1*q2)*q3;
Quaternion p1(0, vertices[x].x(), vertices[x].y(), vertices[x].z());
QMatrix4x4 m;
m.rotate(qtot);
QVector4D v = m*p1;
vertices[x] = QVector3D(v.x(),v.y(),v.z());回答 2
Stack Overflow用户
发布于 2015-06-21 09:17:51
您的问题是,即使使用四元数,您仍然存储三个螺距、偏航和滚动值,而不是四元数,以表示对象的方向。
下面是使用四元数进行旋转的方法:
- 不是存储每个对象的X、Y、Z、螺距、偏航、滚动,而是在每个对象中存储X、Y、Z、
orientation,其中orientation是从初始值(0、0、0、1)开始的四元数,意思是没有旋转。存储每个对象的俯仰、偏航和滚动容易受到奇点(万向节锁)的影响,因为当添加小的变化时,中间的一个旋转(例如,一个螺距)可能导致该对象平行于一个旋转轴(例如,偏航轴),因此围绕该轴的下一个旋转可能失败。 - 然后,当对象被旋转时,确定在该帧中发生的对象的音调、偏航和滚动(假设您的输入设备以该形式提供旋转),将其转换为四元数,然后将该四元数预乘为对象的
orientation四元数。这种方法不太容易受到奇点的影响,因为预计每一帧的旋转变化都很小。 - 更改方向后,不要直接修改对象的X、Y和Z(
verticies数组)。相反,当对象的方向发生变化时,创建一个新的旋转矩阵作为对象的世界转换矩阵的一部分(以及缩放和平移;要获得最佳结果,请将世界转换计算为translation * rotation * scaling)。 - 每隔几个帧,您就应该对
orientation四元数进行规范化,以避免由于舍入错误而导致的方向上的不适当的更改。
Stack Overflow用户
发布于 2015-02-27 17:28:44
如果你用一个欧拉角表示并把它转换成四元数,仅仅是为了做向量旋转,那么你仍然只是使用欧拉角。只要你在任何地方都有欧拉角,万向节锁定问题就会继续存在。你需要完全切换到四元数,如果你想要完全消除这个问题的话,永远不要在任何地方进行欧拉角表示。
这样做的基本方法是,您可以在计算的远端使用Euler角(作为原始输入或最终输出),如果这对您更方便的话(例如,Euler角通常是一种“人类可读性”的表示)。但是,将四元数用于其他一切(您可以偶尔将其转换为旋转矩阵,因为它们对于旋转向量更有效),并且从不对任何“坏”的旋转表示(欧拉角、轴角等)进行中间转换。“万向无锁”的四元数和旋转矩阵的好处,只有当你坚持这两个表示在你的所有计算。
因此,一方面,您有奇异表示( "gimbal锁“的正式术语是奇点):
- 欧拉角(顺便说一句,有12种);以及
- 轴角
在另一边,你有一个没有奇异性的表示:
- 四元数(更有效的内存和组合运算);以及
- 旋转矩阵(更有效地将旋转应用于向量)。
每当您使用奇异表示操作(比如将几个旋转集合在一起,或移动一个旋转对象)时,您将不得不在每次计算中都担心这种奇异性。当你用奇点无关表示做同样的操作时,你就不用担心这个问题了(但是你必须担心约束,这是四元数的单位范数约束,旋转矩阵的适当正交性)。当然,任何时候,当你转换到或从一个奇异表示,你必须担心奇点。这就是为什么你只应该在你的计算的远端进行转换(当你进入或离开时),并且在你的计算中坚持使用非奇异表示。
欧拉角的唯一好用途是为了人类的可读性,周期。
https://stackoverflow.com/questions/28776788
复制











相似问题
将正常项目升级为Xamarin.Forms项目
数独项目无法为按钮分配级别
单元测试数独-测试应该尝试独立于数独板的数据结构吗?
将旧go项目升级为使用go模块
会话项目始终为空
领取专属 10元无门槛券
AI混元助手 在线答疑

洞察 腾讯核心技术
剖析业界实践案例

腾讯云开发者
