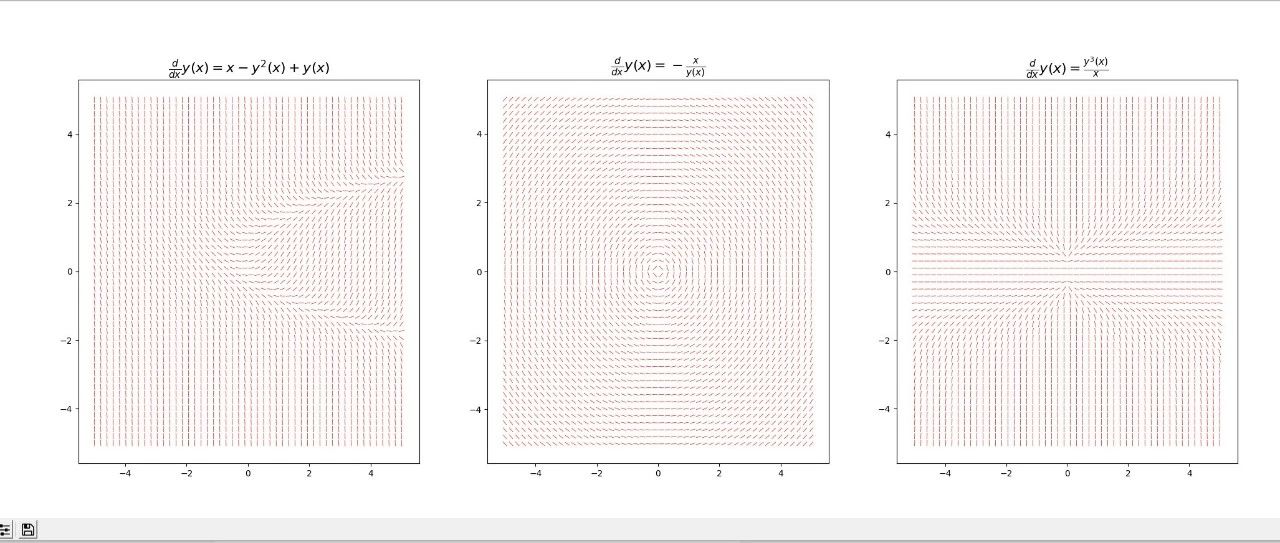
绘制微分方程系统函数外的变量
我有一个函数中的4-4微分方程组(subsystem4),我用odeint函数解决了它。我设法画出了系统的结果。我的问题是我想要绘制和一些其他方程(例如x,y,vcxdot...)它们都包含在相同的函数(subsystem4)中,但我得到了NameError:没有定义名称'vcxdot‘。此外,我想使用其中的一些方程(不仅是方程系统的结果)作为下面的微分方程系统的输入,并绘制同一时间段(t)内的所有方程。我已经使用Matlab-Simulink做到了这一点,但由于Simulink块的存在,它要容易得多。如何访问和绘制函数(subsystem4)的所有方程式,并将它们用作以下系统的输入?我是python新手,我使用的是Python 2.7.12。提前谢谢你!
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
def subsystem4(u,t):
added_mass_x = 0.03 # kg
added_mass_y = 0.04
mb = 0.3 # kg
m1 = mb-added_mass_x
m2 = mb-added_mass_y
l1 = 0.07 # m
l2 = 0.05 # m
J = 0.00050797 # kgm^2
Sa = 0.0110 # m^2
Cd = 2.44
Cl = 3.41
Kd = 0.000655 # kgm^2
r = 1000 # kg/m^3
f = 2 # Hz
c1 = 0.5*r*Sa*Cd
c2 = 0.5*r*Sa*Cl
c3 = 0.5*mb*(l1**2)
c4 = Kd/J
c5 = (1/(2*J))*(l1**2)*mb*l2
c6 = (1/(3*J))*(l1**3)*mb
vcx = u[0]
vcy = u[1]
psi = u[2]
wz = u[3]
x = 3 + 0.3*np.cos(t)
y = 0.5 + 0.3*np.sin(t)
xdot = -0.3*np.sin(t)
ydot = 0.3*np.cos(t)
xdotdot = -0.3*np.cos(t)
ydotdot = -0.3*np.sin(t)
vcx = xdot*np.cos(psi)-ydot*np.sin(psi)
vcy = ydot*np.cos(psi)+xdot*np.sin(psi)
psidot = wz
vcxdot = xdotdot*np.cos(psi)-xdot*np.sin(psi)*psidot-ydotdot*np.sin(psi)-ydot*np.cos(psi)*psidot
vcydot = ydotdot*np.cos(psi)-ydot*np.sin(psi)*psidot+xdotdot*np.sin(psi)+xdot*np.cos(psi)*psidot
g1 = -(m1/c3)*vcxdot+(m2/c3)*vcy*wz-(c1/c3)*vcx*np.sqrt((vcx**2)+(vcy**2))+(c2/c3)*vcy*np.sqrt((vcx**2)+(vcy**2))*np.arctan2(vcy,vcx)
g2 = (m2/c3)*vcydot+(m1/c3)*vcx*wz+(c1/c3)*vcy*np.sqrt((vcx**2)+(vcy**2))+(c2/c3)*vcx*np.sqrt((vcx**2)+(vcy**2))*np.arctan2(vcy,vcx)
A = 12*np.sin(2*np.pi*f*t+np.pi)
if A>=0.1:
wzdot = ((m1-m2)/J)*vcx*vcy-c4*wz**2*np.sign(wz)-c5*g2-c6*np.sqrt((g1**2)+(g2**2))
elif A<-0.1:
wzdot = ((m1-m2)/J)*vcx*vcy-c4*wz**2*np.sign(wz)-c5*g2+c6*np.sqrt((g1**2)+(g2**2))
else:
wzdot = ((m1-m2)/J)*vcx*vcy-c4*wz**2*np.sign(wz)-c5*g2
return [vcxdot,vcydot,psidot,wzdot]
u0 = [0,0,0,0]
t = np.linspace(0,15,1000)
u = odeint(subsystem4,u0,t)
vcx = u[:,0]
vcy = u[:,1]
psi = u[:,2]
wz = u[:,3]
plt.figure(1)
plt.subplot(211)
plt.plot(t,vcx,'r-',linewidth=2,label='vcx')
plt.plot(t,vcy,'b--',linewidth=2,label='vcy')
plt.plot(t,psi,'g:',linewidth=2,label='psi')
plt.plot(t,wz,'c',linewidth=2,label='wz')
plt.xlabel('time')
plt.legend()
plt.show()回答 1
Stack Overflow用户
发布于 2019-01-08 12:45:42
对于直接绘制导数图的问题,您可以通过直接在解决方案上再次调用ODE函数来获得速度,
u = odeint(subsystem4,u0,t)
udot = subsystem4(u.T,t)并通过以下方式获得单独的速度阵列
vcxdot,vcydot,psidot,wzdot = udot在这种情况下,该函数涉及分支,这对它的矢量化调用不是很友好。有向量化分支的方法,但最简单的变通方法是手动循环遍历解决方案点,这比工作的矢量化实现慢。这将再次获得像odeint这样的元组列表,因此结果必须作为列表的元组进行转置,以便“轻松”分配给单个数组变量。
udot = [ subsystem4(uk, tk) for uk, tk in zip(u,t) ];
vcxdot,vcydot,psidot,wzdot = np.asarray(udot).T

这可能会使计算看起来加倍,但并不是真的,因为解点通常是从求解器的内部步长点插值的。在积分过程中,常微分方程函数的求值通常发生在与解点不同的点上。
对于其他变量,将位置和速度的计算提取到函数中,以便仅在一个位置具有常量和组合:
def xy_pos(t): return 3 + 0.3*np.cos(t), 0.5 + 0.3*np.sin(t)
def xy_vel(t): return -0.3*np.sin(t), 0.3*np.cos(t)
def xy_acc(t): return -0.3*np.cos(t), -0.3*np.sin(t)或类似的,然后您可以在ODE函数内部和在准备绘图时使用。
Simulink最有可能做的是收集所有块的所有方程,并将其形成一个大的常微分方程系统,然后立即求解整个状态。您将需要实现类似的东西。一个大的状态向量,每个子系统知道它的状态对应的切片。导数向量来获取其特定的状态变量,并将导数写入其中。然后,导数的计算可以使用在子系统之间传递的值。
你试图做的事情,分别解决子系统,只对resp有效。可能会导致order 1集成方法。所有高阶方法都需要能够同时在方法的前几个阶段计算出的某个方向上转移状态,并在那里评估整个系统。
https://stackoverflow.com/questions/54089599
复制








相似问题
绘制微分方程图
变量外函数
绘制python中的微分方程
函数外的智能函数变量
Anylogic中的微分方程系统
领取专属 10元无门槛券
AI混元助手 在线答疑

洞察 腾讯核心技术
剖析业界实践案例

腾讯云开发者
