
如何使用图像创建动画?
提问于 2013-09-10 22:17:59
我有一个满手的图像,我想把它放到一个简单的程序中,向我展示动画的样子?
我知道photoshop可以做到这一点,但我正在寻找一些简单的东西。我想做的就是把图像添加到程序中,它只是向我展示了它的顺序。我看了一些工具,但它们看起来都很复杂。有谁能推荐他们的节目吗?
谢谢

回答 1
Stack Overflow用户
回答已采纳
发布于 2013-09-10 22:26:01
酷最简单的解决方案!我用过很多次了
PowerPoint
- 打开powerpoint演示文稿。
- 选择"File"->"Save As“(文件是大型圆形office按钮)
- 单击“另存为”或单击“其他格式”
- 选择要保存的位置(这将作为图像文件夹保存)
- 在“另存类型为”下,选择"GIF“并单击”保存“
- 将出现提示符,选择“每个幻灯片”
- 提示将告诉您它已被保存。
GIMP
- 开放GIMP
- 选择“File”->“打开为层”
- 导航到上面创建的图像文件夹。
- 选择要打开的幻灯片。按住"Ctrl“并单击以选择多个文件,或单击一个文件,然后按住"shift”,然后单击下面的一个以选择介于两者之间的文件。
- 选择“打开”...Gimp现在将加载图像。
- 选择"File"->"Save As“
- 对于“名称”,请确保它以".gif“(如"example.gif”)结尾,然后单击“保存”。
- “导出文件”对话框将弹出:
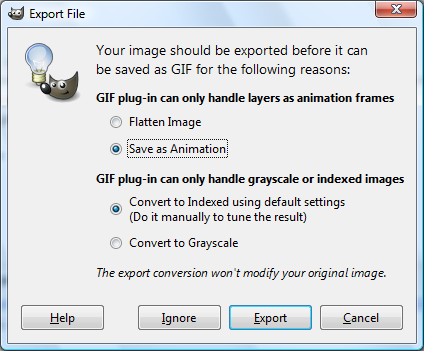
9另一个对话框将弹出:
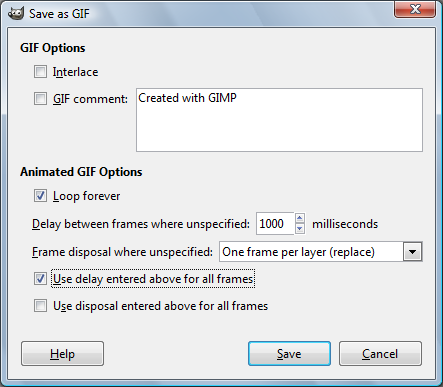
10击拯救你就完蛋了。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/18733949
复制相关文章















腾讯云开发者
